กฎเหล็ก: อย่าเลือกอุปกรณ์โดยดูจากค่ากิโลวัตต์ (kW) ของมอเตอร์เพียงอย่างเดียว
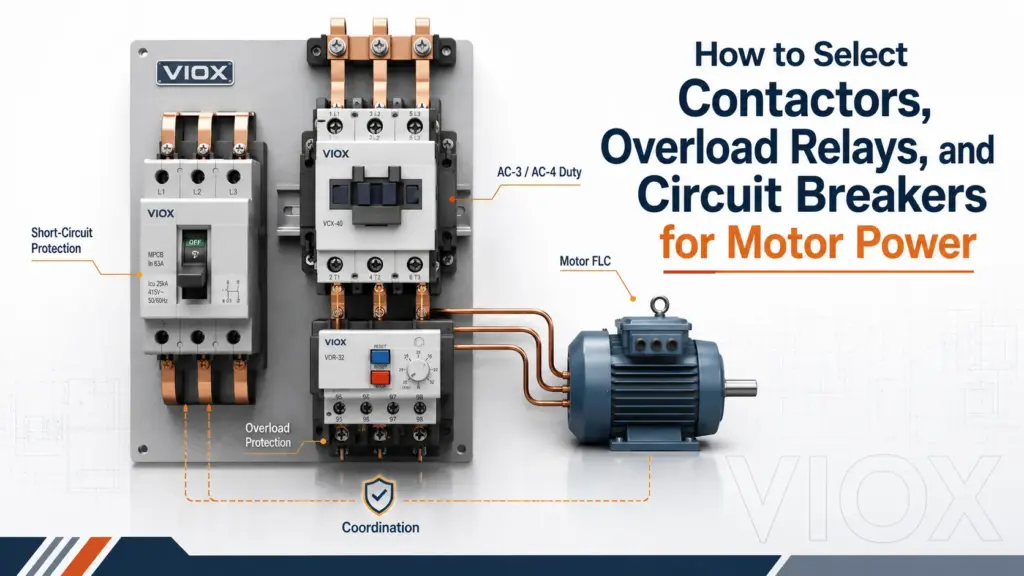
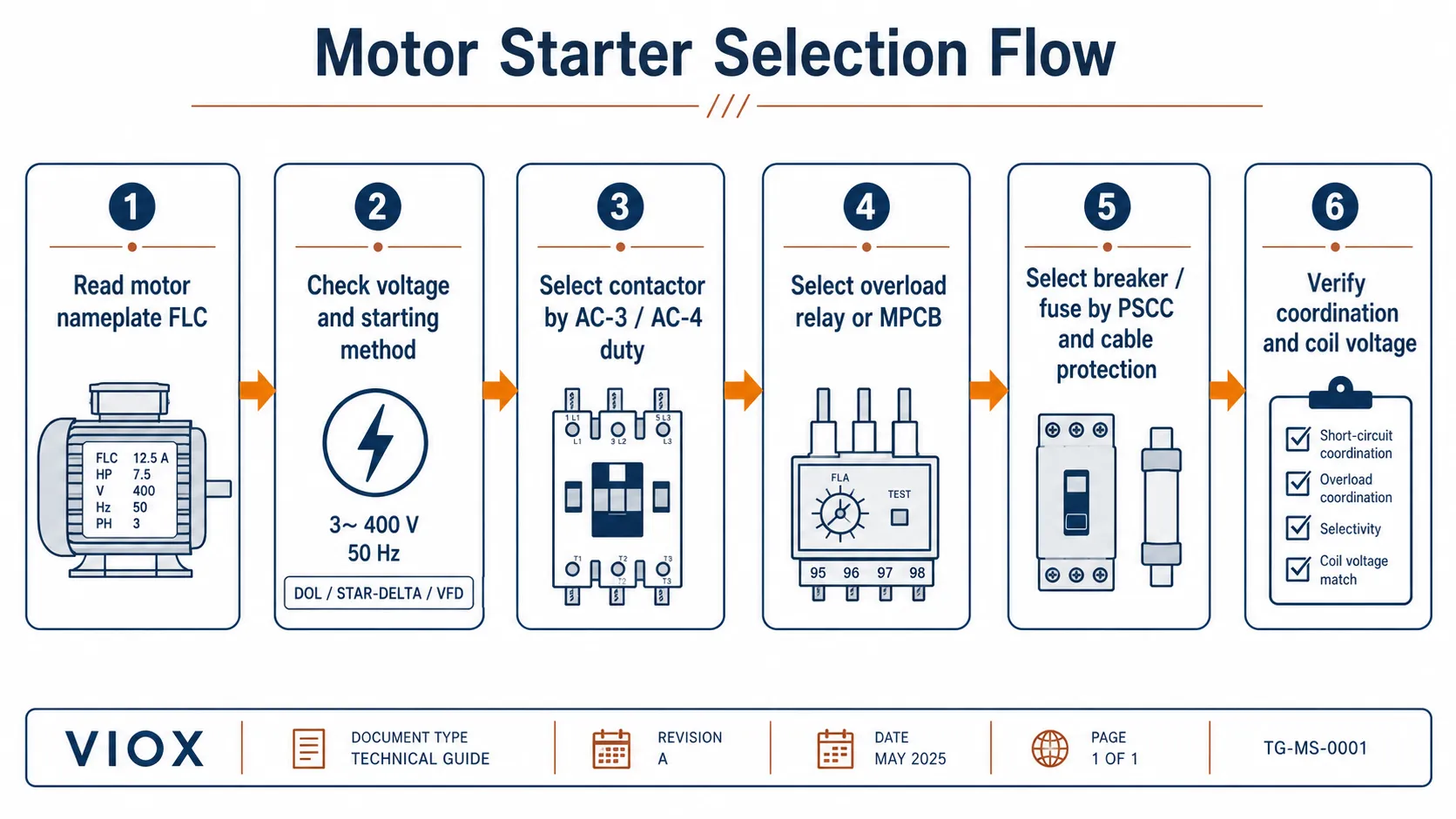
กำลังมอเตอร์เป็นเพียงจุดเริ่มต้นเท่านั้น ในการเลือกคอนแทคเตอร์ โอเวอร์โหลดรีเลย์ และเซอร์กิตเบรกเกอร์ให้ถูกต้อง ก่อนอื่นต้องแปลงกำลังมอเตอร์ให้เป็น กระแสไฟฟ้าเต็มโหลดของมอเตอร์ (FLC), จากนั้นจึงตรวจสอบแรงดันไฟฟ้าของมอเตอร์ วิธีการสตาร์ท ประเภทการใช้งาน รอบการทำงาน ระดับการลัดวงจร การป้องกันโอเวอร์โหลด และการประสานการทำงานระหว่างอุปกรณ์.
สำหรับตู้ควบคุมมอเตอร์แรงดันต่ำส่วนใหญ่:
- การ contactor ทำหน้าที่เปิดและปิดการทำงานของมอเตอร์.
- การ โอเวอร์โหลดรีเลย์ ทำหน้าที่ป้องกันมอเตอร์จากสภาวะโอเวอร์โหลดต่อเนื่อง.
- การ MCB, MCCB, ฟิวส์ หรือ MPCB ให้การป้องกันไฟฟ้าลัดวงจรและการป้องกันวงจรย่อย.
- เป็ สตาร์ทเตอร์มอเตอร์ (motor starter) คือการประกอบอุปกรณ์เหล่านี้เข้าด้วยกันอย่างสอดคล้อง.
ข้อผิดพลาดที่ใหญ่ที่สุดคือการเลือกคอนแทคเตอร์และเบรกเกอร์โดยตรงจากค่ากิโลวัตต์ (kW) ด้วยตัวคูณแบบง่าย มอเตอร์ขนาด 7.5 กิโลวัตต์ที่ใช้ในปั๊ม เครื่องบด และรอกแบบกลับทางหมุน อาจต้องการหน้าที่การสลับการทำงาน คลาสการโอเวอร์โหลด และการป้องกันไฟฟ้าลัดวงจรที่แตกต่างกัน.
หากคุณต้องการการเปรียบเทียบอุปกรณ์พื้นฐานก่อน โปรดดูที่ คอนแทคเตอร์เทียบกับสตาร์ทเตอร์มอเตอร์. คู่มือนี้เน้นไปที่การเลือกใช้งานจริง.
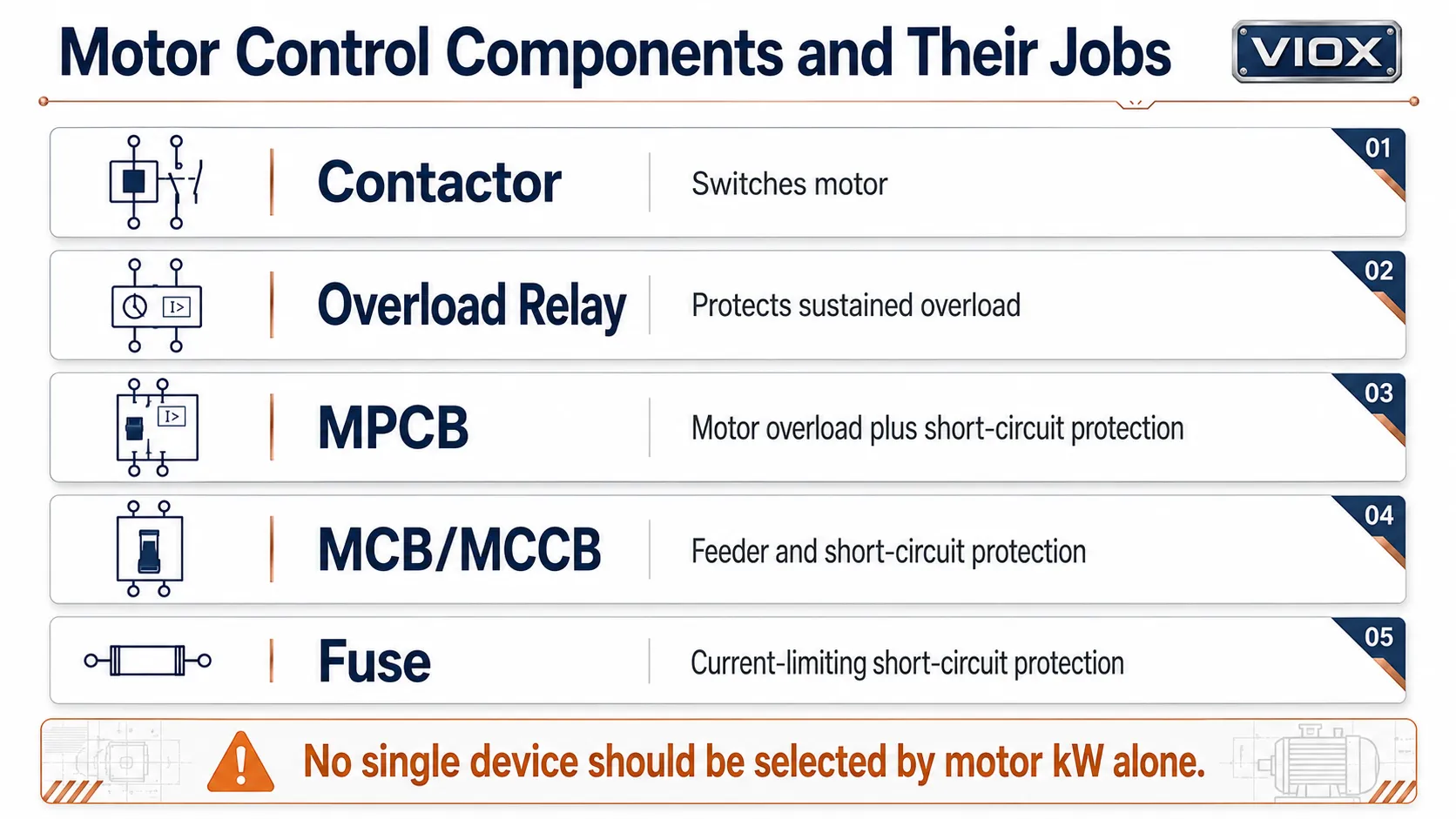
ส่วนประกอบควบคุมมอเตอร์และหน้าที่ของอุปกรณ์
| อุปกรณ์ | หน้าที่หลัก | เกณฑ์การเลือก | ข้อผิดพลาดทั่วไป |
|---|---|---|---|
| คอนแทคเตอร์ | เปิด/ปิดการทำงานของมอเตอร์ | พิกัดมอเตอร์แบบ AC-3 หรือ AC-4, แรงดันไฟฟ้า, รอบการทำงาน (Duty cycle), แรงดันคอยล์ | การเลือกโดยใช้พิกัดกระแสโหลดความต้านทานแบบ AC-1 |
| รีเลย์โอเวอร์โหลดแบบความร้อน/อิเล็กทรอนิกส์ | ป้องกันมอเตอร์จากสภาวะโอเวอร์โหลดต่อเนื่อง | กระแสโหลดเต็มพิกัด (FLC) ตามป้ายชื่อมอเตอร์, คลาสการทริป, โหมดการรีเซ็ต | การละเว้นการป้องกันโอเวอร์โหลดเนื่องจากมีการติดตั้งเบรกเกอร์ไว้แล้ว |
| เอ็มพีซีบี | การป้องกันโอเวอร์โหลดและไฟฟ้าลัดวงจรของมอเตอร์ในอุปกรณ์เดียว | ช่วงกระแสของมอเตอร์, พิกัดการตัดกระแสลัดวงจร, การประสานการทำงาน | การใช้งานเสมือนเป็นเซอร์กิตเบรกเกอร์ย่อย (MCB) ทั่วไป |
| MCB/MCCB | การป้องกันวงจรย่อยและการป้องกันกระแสลัดวงจร | ค่ากระแสลัดวงจรที่จุดติดตั้ง (PSCC), ขนาดสายไฟ, กราฟการทริป/การตั้งค่า, การประสานการทำงาน | การตั้งค่าการทริปแบบทันทีต่ำเกินไปสำหรับการสตาร์ทมอเตอร์ |
| ฟิวส์ | การป้องกันกระแสลัดวงจร ซึ่งมักมีความสามารถในการจำกัดกระแสสูง | ประเภทของฟิวส์, พิกัดการตัดกระแสลัดวงจร, การประสานการทำงาน | การใช้ประเภทฟิวส์ไม่เหมาะสมกับลักษณะงานของมอเตอร์ |
คอนแทคเตอร์ไม่ใช่เครื่องป้องกันกระแสเกิน รีเลย์ป้องกันกระแสเกินแบบพื้นฐานไม่ใช่เครื่องป้องกันการลัดวงจร และเซอร์กิตเบรกเกอร์ขนาดเล็ก (MCB) ทั่วไปไม่ได้เป็นอุปกรณ์ป้องกันมอเตอร์โดยอัตโนมัติ ขอบเขตเหล่านี้มีความสำคัญ.
ขั้นตอนที่ 1: แปลงกำลังมอเตอร์เป็นกระแสโหลดเต็มพิกัด
สำหรับมอเตอร์สามเฟส การประมาณค่ากระแสสายเบื้องต้นคือ:
I = P / (sqrt(3) x V x PF x eta)ที่ไหน:
ฉัน= กระแสของมอเตอร์ในหน่วยแอมแปร์พี= กำลังไฟฟ้าขาเข้าหรือขาออกของมอเตอร์ในหน่วยวัตต์ ขึ้นอยู่กับข้อมูลที่มีวี= แรงดันไฟฟ้าระหว่างเฟส (Line-to-line voltage)ตัวประกอบกำลัง (PF)= ตัวประกอบกำลัง (Power factor)eta= ประสิทธิภาพ
หากคุณทราบเพียงกำลังไฟฟ้าขาออกของมอเตอร์ในหน่วยกิโลวัตต์ ให้ใช้สูตรนี้ในการประมาณค่า จากนั้นตรวจสอบกับแผ่นป้ายชื่อมอเตอร์ การเลือกอุปกรณ์ขั้นสุดท้ายควรใช้ กระแสโหลดเต็มพิกัดจากแผ่นป้ายชื่อมอเตอร์, ไม่ใช่แค่การคำนวณกระแสไฟฟ้าเท่านั้น.
ตัวอย่าง:
มอเตอร์สามเฟสขนาด 7.5 กิโลวัตต์ 400 โวลต์ โดยมีค่าตัวประกอบกำลังไฟฟ้า (Power Factor) ประมาณ 0.85 และประสิทธิภาพ 0.90:
I = 7500 / (1.732 x 400 x 0.85 x 0.90)I ≈ 14.2 แอมแปร์การประมาณการนี้ช่วยให้คุณเริ่มต้นได้ ค่ากระแสไฟฟ้าจริงบนแผ่นป้ายชื่อ (Nameplate) อาจแตกต่างออกไป โดยการออกแบบมอเตอร์ ระดับประสิทธิภาพ ความถี่ ค่าตัวประกอบการใช้งาน (Service Factor) สภาพแวดล้อม และการออกแบบของผู้ผลิตล้วนส่งผลต่อค่าที่แท้จริง.
สำหรับสูตรทางไฟฟ้าแรงดันต่ำเพิ่มเติม โปรดดูที่ สูตรทางไฟฟ้าสำหรับการออกแบบและบำรุงรักษาตู้ไฟฟ้าแรงดันต่ำ.
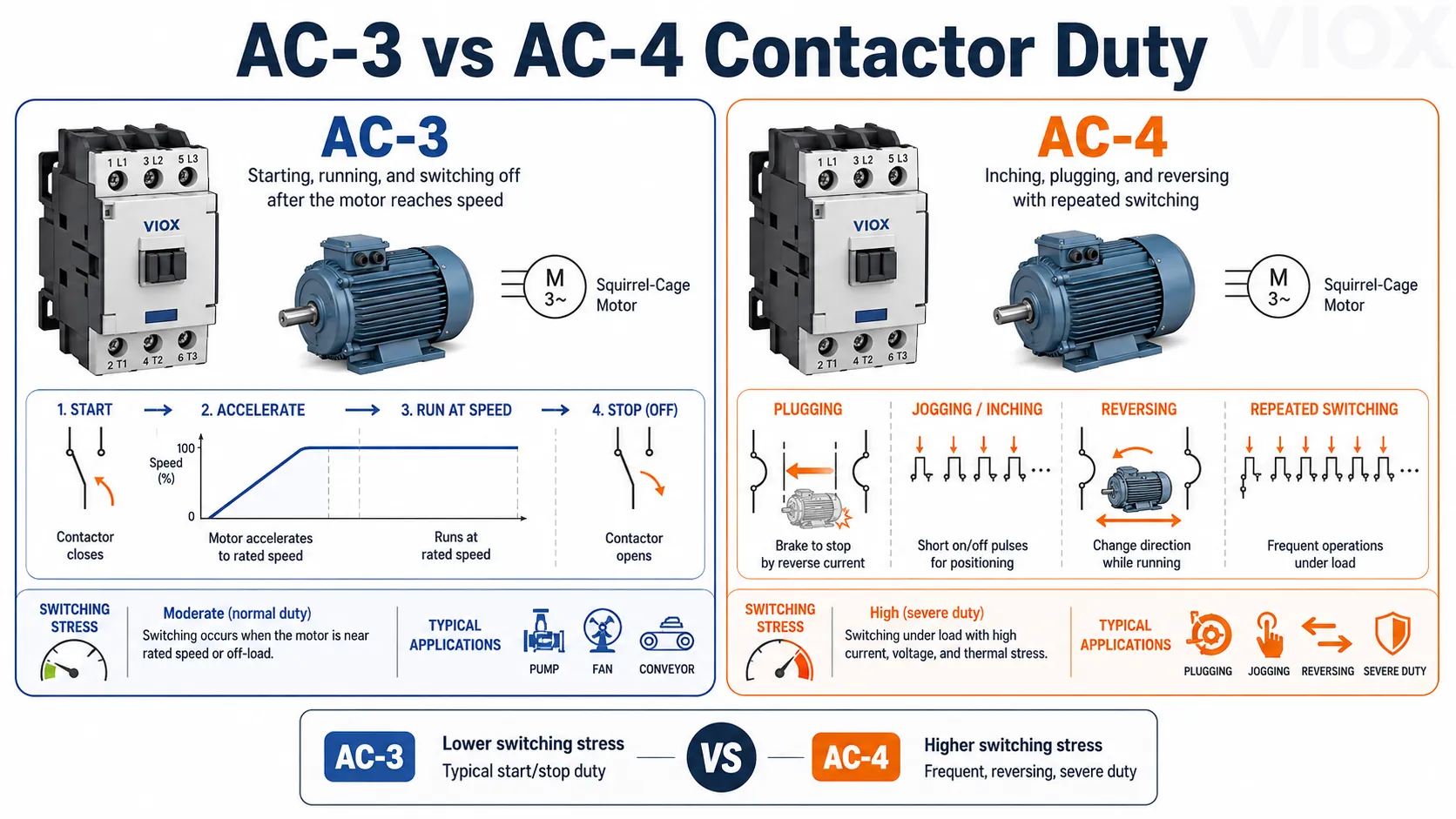
ขั้นตอนที่ 2: เลือกคอนแทคเตอร์ตามประเภทการใช้งาน AC-3 หรือ AC-4
สำหรับการควบคุมมอเตอร์ตามมาตรฐาน IEC การเลือกคอนแทคเตอร์ไม่ได้พิจารณาจากพิกัดกระแสไฟฟ้าทั่วไปเพียงอย่างเดียว แต่ประเภทการใช้งาน (Utilization Category) มีความสำคัญด้วย.
| ประเภทการใช้งาน | ลักษณะการใช้งานทั่วไป | ความหมายสำหรับการเลือกใช้งาน |
|---|---|---|
| แน่นอ-1 | ไม่ inductive หรือนิดหน่อ inductive จริงเชียว | โหลดความต้านทาน ไม่ใช่การสตาร์ทมอเตอร์ตามปกติ |
| ซี-3 | การสตาร์ทมอเตอร์แบบกรงกระรอกและการตัดวงจรหลังจากมอเตอร์ถึงความเร็วรอบปกติ | การใช้งานทั่วไปสำหรับปั๊ม พัดลม คอมเพรสเซอร์ และสายพานลำเลียง |
| เอซี-4 | การสตาร์ท การเบรกด้วยไฟฟ้า การเดินเครื่องแบบจังหวะ และการกลับทางหมุน | หนักกว่า AC-3 มาก คอนแทคเตอร์อาจจำเป็นต้องมีขนาดใหญ่ขึ้น |
| แน่นอ-15 | การควบคุมโหลดแม่เหล็กไฟฟ้ากระแสสลับ (AC) | หน้าสัมผัสช่วย/หน้าสัมผัสควบคุม ไม่ใช่หน้าสัมผัสกำลังหลักสำหรับมอเตอร์ |
สำหรับการสตาร์ทมอเตอร์แบบต่อตรง (Direct-on-line) มาตรฐาน พิกัด AC-3 มักเป็นพิกัดหลักของคอนแทคเตอร์ แต่สำหรับการใช้งานแบบกลับทางหมุน การจ็อกกิ้ง (Jogging) การเบรกแบบพลักกิ้ง (Plugging) เครน รอก หรือการใช้งานที่ต้องตัดต่อบ่อยครั้ง จะต้องตรวจสอบพิกัด AC-4 หรือสภาวะการใช้งานที่หนักกว่า.
ห้ามเลือกคอนแทคเตอร์สำหรับมอเตอร์โดยดูจากกระแส AC-1 ที่ระบุบนอุปกรณ์เพียงอย่างเดียว เนื่องจาก AC-1 มีไว้สำหรับโหลดประเภทความต้านทานหรือโหลดที่มีค่าความเหนี่ยวนำต่ำ คอนแทคเตอร์ที่มีพิกัด AC-1 สูง อาจมีพิกัดสำหรับมอเตอร์ในระดับ AC-3 หรือ AC-4 ที่ต่ำกว่ามาก.
สำหรับการประเมินผลิตภัณฑ์ VIOX โปรดดูที่ แน่นอ Contactor หน้าผลิตภัณฑ์.
ขั้นตอนที่ 3: ตรวจสอบแรงดันไฟฟ้าของคอนแทคเตอร์ จำนวนขั้ว และแรงดันไฟฟ้าของคอยล์
หลังจากเลือกพิกัดการใช้งานของมอเตอร์แล้ว ให้ยืนยันข้อมูลดังนี้:
- จำนวนขั้ว
- แรงดันไฟฟ้าใช้งานที่กำหนด
- กระแสไฟฟ้าของมอเตอร์หรือพิกัดกิโลวัตต์ (kW) ที่แรงดันไฟฟ้าใช้งานจริง
- พิกัด AC-3 หรือ AC-4
- หน้าที่ในการตัดและต่อกระแสไฟฟ้า
- ความทนทานทางไฟฟ้าสำหรับรอบการทำงาน
- ความทนทานทางกล
- ความต้องการหน้าสัมผัสช่วย (Auxiliary contact)
- แรงดันคอยล์และประเภทของวงจรควบคุม
แรงดันคอยล์เป็นข้อผิดพลาดที่พบบ่อยในหน้างาน มอเตอร์อาจใช้แรงดัน 400 VAC แต่วงจรควบคุมอาจเป็น 24 VDC, 110 VAC หรือ 230 VAC คอยล์ของคอนแทคเตอร์ต้องตรงกับวงจรควบคุม ไม่ใช่วงจรกำลังของมอเตอร์.
ตรวจสอบลักษณะการใช้งาน (Application duty) ด้วย:
- การเริ่ม/หยุดการทำงานของปั๊มหรือพัดลมแบบมาตรฐาน
- การทำงานแบบเปิด-ปิดบ่อยครั้ง
- การทำงานแบบเดินหน้า/ถอยหลัง
- สตาร์ทเตอร์แบบสตาร์-เดลต้า
- การบายพาสซอฟต์สตาร์ทเตอร์
- คอนแทคเตอร์สำหรับอินพุตหรือบายพาสของ VFD
- การสลับตัวเก็บประจุ (ถ้ามี)
หน้าที่การทำงานแต่ละประเภทอาจส่งผลต่อการเลือกใช้คอนแทคเตอร์ที่เหมาะสม.
ขั้นตอนที่ 4: การเลือกโอเวอร์โหลดรีเลย์
มอเตอร์จำเป็นต้องมีการป้องกันการใช้งานเกินกำลังเนื่องจากอาจเกิดความร้อนสูงเกินไปภายใต้สภาวะการใช้งานเกินพิกัดอย่างต่อเนื่อง สภาวะโรเตอร์ติดขัด การสูญเสียเฟส หรือปัญหาจากโหลดทางกล.
โดยทั่วไปการเลือกโอเวอร์โหลดรีเลย์จะพิจารณาจาก:
- กระแสไฟฟ้าเต็มพิกัดที่ระบุบนแผ่นป้ายมอเตอร์
- ช่วงการปรับตั้งกระแสของโอเวอร์โหลดรีเลย์
- คลาสทริป
- โหมดการรีเซ็ตแบบแมนนวลหรือแบบอัตโนมัติ
- ความไวต่อการสูญเสียเฟส (หากจำเป็น)
- ความเข้ากันได้กับคอนแทคเตอร์
- การชดเชยอุณหภูมิโดยรอบ (ถ้ามี)
การตั้งค่ากระแสเกิน (Overload) ควรพิจารณาจากกระแสไฟฟ้าที่ระบุบนแผ่นป้ายมอเตอร์ (Nameplate) และเป็นไปตามกฎระเบียบในท้องถิ่นหรือคำแนะนำของผู้ผลิต.
คลาสการตัดวงจร (Trip class) มีความสำคัญ
คลาสการตัดวงจรบ่งบอกถึงความเร็วในการตัดวงจรของรีเลย์โอเวอร์โหลดภายใต้สภาวะการใช้งานที่กำหนด โดยทั่วไปในงานควบคุมมอเตอร์มักใช้คลาส 10, คลาส 20 และคลาส 30.
| คลาสการตัดวงจร (Trip class) | การใช้งานทั่วไป |
|---|---|
| ≤10 วินาที | มอเตอร์มาตรฐานที่มีเวลาในการสตาร์ทปกติ |
| ≤20 วินาที | โหลดที่มีเวลาในการเร่งความเร็วสูงขึ้น |
| ≤30 วินาที | โหลดที่ต้องการแรงบิดขณะสตาร์ทสูงและใช้เวลาในการเร่งความเร็วนานขึ้น |
อย่าเลือกคลาสการทริป (Trip Class) ที่สูงขึ้นเพียงเพื่อแก้ปัญหาการทริปโดยไม่มีสาเหตุ หากมอเตอร์ไม่สามารถสตาร์ทได้โดยไม่มีคลาสการทริปที่สูง ให้ตรวจสอบวิธีการสตาร์ท ความเฉื่อยของโหลด แรงดันตก โหลดทางกล และความเหมาะสมของมอเตอร์.
สำหรับคำแนะนำเชิงลึก โปรดดู คู่มือการเลือกใช้โอเวอร์โหลดรีเลย์แบบความร้อน แล้ว คู่มือเปรียบเทียบโอเวอร์โหลดรีเลย์ระหว่าง NEMA Class 20 และ IEC Class 10.
ขั้นตอนที่ 5: การตัดสินใจเลือกระหว่างโอเวอร์โหลดรีเลย์กับ MPCB
หนึ่ง เอ็มพีซีบี, หรือเซอร์กิตเบรกเกอร์สำหรับป้องกันมอเตอร์ (Motor Protection Circuit Breaker) เป็นอุปกรณ์ที่รวมการป้องกันมอเตอร์เกินโหลดและการป้องกันไฟฟ้าลัดวงจรไว้ในอุปกรณ์เดียว ขึ้นอยู่กับการออกแบบและพิกัดของผลิตภัณฑ์ มักใช้ในตู้สตาร์ทมอเตอร์ขนาดกะทัดรัด.
| ตัวเลือก | เหมาะสมที่สุด | จุดที่ควรสังเกต |
|---|---|---|
| คอนแทคเตอร์ + โอเวอร์โหลดรีเลย์ + ฟิวส์/MCB/MCCB | ชุดสตาร์ทมอเตอร์แบบดั้งเดิม มีความยืดหยุ่นในการประสานการทำงาน | ต้องมีอุปกรณ์ป้องกันไฟฟ้าลัดวงจรแยกต่างหาก |
| MPCB + คอนแทคเตอร์ | ชุดป้อนกำลังมอเตอร์ขนาดกะทัดรัด, ตู้ควบคุมเครื่องจักร, ชุดสตาร์ทเตอร์แบบโมดูลาร์ | MPCB ต้องมีช่วงกระแสไฟฟ้าและระดับการทนกระแสลัดวงจรที่เหมาะสมกับมอเตอร์ |
| MCCB + คอนแทคเตอร์ + โอเวอร์โหลดรีเลย์ | มอเตอร์ขนาดใหญ่, ชุดป้อนกำลังที่มีระดับกระแสลัดวงจรสูง | การตั้งค่า MCCB ต้องสัมพันธ์กับกระแสขณะสตาร์ทและโอเวอร์โหลดรีเลย์ |
| ฟิวส์ + คอนแทคเตอร์ + โอเวอร์โหลดรีเลย์ | การจำกัดกระแสลัดวงจรสูงและการประสานการทำงานที่มีประสิทธิภาพ | จำเป็นต้องใช้ฟิวส์ให้ถูกประเภทและมีระเบียบวินัยในการเปลี่ยน |
หากคุณกำลังเลือกระหว่างโอเวอร์โหลดรีเลย์กับ MPCB โปรดดู โอเวอร์โหลดรีเลย์แบบความร้อน (Thermal Overload Relay) กับ MPCB.
ขั้นตอนที่ 6: เลือกอุปกรณ์ป้องกันกระแสลัดวงจร
การป้องกันกระแสลัดวงจรแตกต่างจากการป้องกันกระแสเกิน.
อุปกรณ์ป้องกันกระแสลัดวงจรอาจเป็น:
- MCB
- MCCB
- เอ็มพีซีบี
- ฟิวส์
- สวิตช์ตัดตอนแบบมีฟิวส์
จะต้องเลือกโดยพิจารณาจาก:
- แรงดันไฟฟ้าที่จ่าย
- กระแสลัดวงจรที่คาดว่าจะเกิดขึ้น ณ จุดติดตั้ง
- ขนาดสายไฟและวิธีการติดตั้ง
- กระแสขณะสตาร์ทมอเตอร์ (Motor starting current)
- กราฟการทริปหรือการตั้งค่าการทริป
- การประสานการทำงานร่วมกับคอนแทคเตอร์และโอเวอร์โหลดรีเลย์
- มาตรฐานที่เกี่ยวข้องและกฎระเบียบในท้องถิ่น
กฎสำคัญคือ:
พิกัดการตัดกระแสลัดวงจรต้องมากกว่าหรือเท่ากับกระแสลัดวงจรที่คาดว่าจะเกิดขึ้นหากกระแสลัดวงจรที่ตู้ไฟฟ้ามีค่า 10 kA เบรกเกอร์ที่มีพิกัดการตัดกระแสลัดวงจรเพียง 6 kA จะไม่เหมาะสมสำหรับจุดติดตั้งนั้น.
สำหรับขอบเขตการเลือกใช้ MCB/MCCB โปรดดูที่ ความสามารถในการตัดกระแสไฟฟ้าของ MCB: 6kA เทียบกับ 10kA แล้ว พิกัดของเซอร์กิตเบรกเกอร์ Icu เทียบกับ Ics เทียบกับ Icw เทียบกับ Icm.
ขั้นตอนที่ 7: อย่าตั้งค่าการตัดกระแสไฟฟ้าแบบทันที (Instantaneous Trip) ต่ำเกินไป
กระแสขณะสตาร์ทมอเตอร์มักมีค่าเป็นหลายเท่าของกระแสโหลดเต็มพิกัด สำหรับการสตาร์ทแบบต่อตรง (Direct-on-line) ค่าประมาณการที่ใช้หน้างานมักจะเป็น:
Istart ≈ 5 ถึง 8 เท่าของกระแสโหลดเต็มพิกัด (FLC) ของมอเตอร์กระแสสตาร์ทที่แท้จริงขึ้นอยู่กับการออกแบบมอเตอร์ แรงดันไฟฟ้าที่จ่าย ความเฉื่อยของโหลด และวิธีการสตาร์ท.
นี่คือเหตุผลว่าทำไมการตั้งค่าการตัดกระแสไฟฟ้าแบบทันทีที่ค่าตัวคูณต่ำๆ ของกระแสโหลดเต็มพิกัดจึงอาจเป็นอันตรายต่อวงจรมอเตอร์ เพราะอาจทำให้เบรกเกอร์ตัดการทำงานทันทีในระหว่างการสตาร์ท.
แนวทางที่ถูกต้องคือ:
- กำหนดค่ากระแสสตาร์ทและระยะเวลาในการสตาร์ทของมอเตอร์.
- เลือกเบรกเกอร์หรือฟิวส์ที่รองรับการสตาร์ทตามปกติได้.
- ยืนยันว่ายังสามารถตัดกระแสลัดวงจรได้อย่างปลอดภัย.
- ประสานการทำงานร่วมกับโอเวอร์โหลดรีเลย์และคอนแทคเตอร์.
- ใช้กราฟการทริปและตารางการประสานการทำงานของผู้ผลิตหากมีให้.
สำหรับวงจรมอเตอร์ขนาดเล็ก อาจพบการใช้ MCB แบบ C-curve หรือ D-curve ในบางการออกแบบ แต่การเลือกขั้นสุดท้ายต้องพิจารณาจากกระแสกระชาก การป้องกันสายไฟ ระดับกระแสลัดวงจร และมาตรฐานท้องถิ่น สำหรับมอเตอร์ขนาดใหญ่ มักจำเป็นต้องใช้ MCCB, MPCB หรือฟิวส์ แทนการใช้ MCB สำหรับวงจรย่อยทั่วไป.
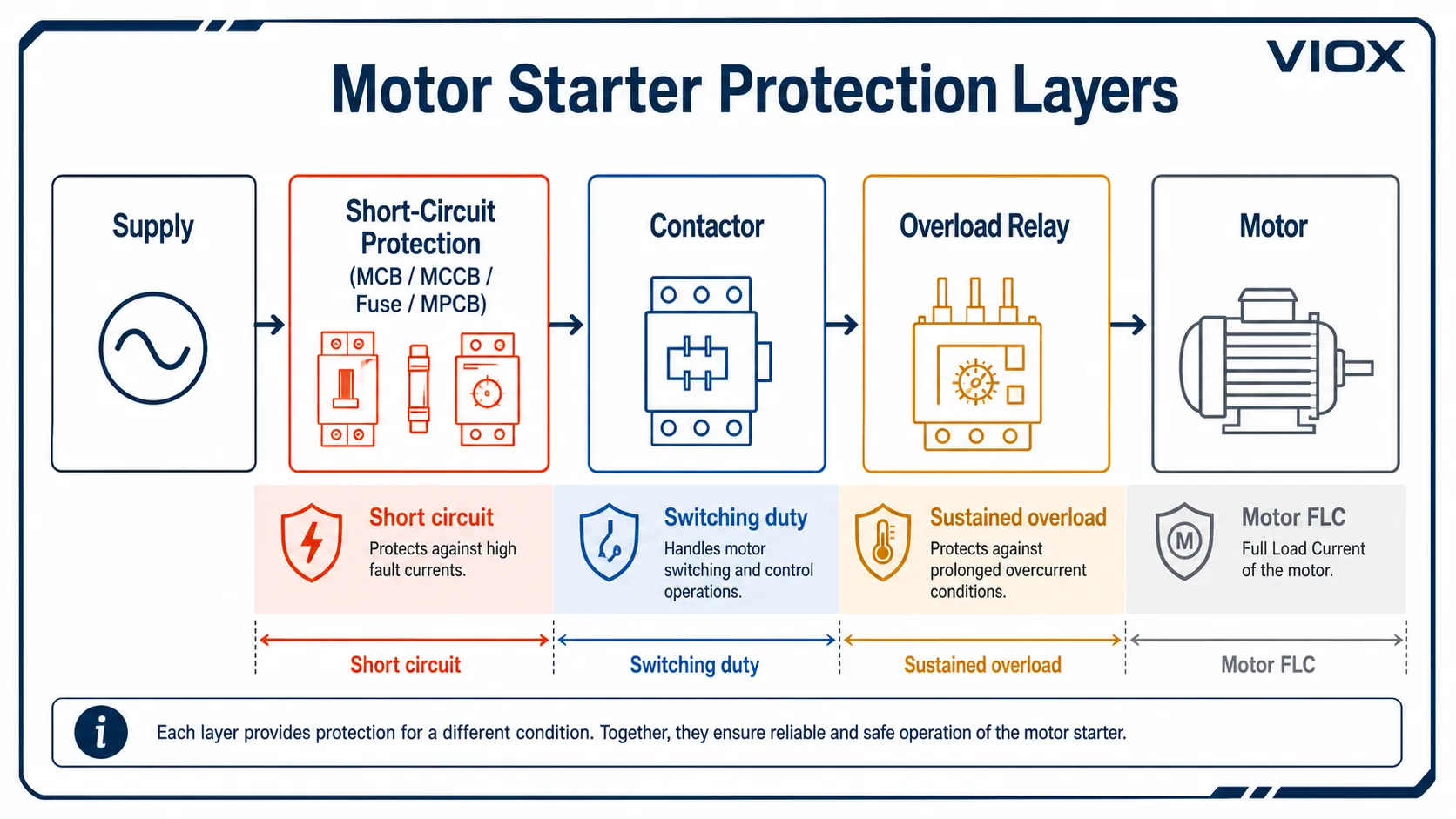
ขั้นตอนที่ 8: ตรวจสอบการประสานการทำงานระหว่างอุปกรณ์
การประสานการทำงานของชุดสตาร์ทมอเตอร์ หมายถึงการที่อุปกรณ์ป้องกันกระแสลัดวงจร คอนแทคเตอร์ และโอเวอร์โหลดรีเลย์ ทำงานร่วมกันได้อย่างปลอดภัยภายใต้สภาวะความผิดพร่อง.
คำถามเกี่ยวกับการประสานการทำงาน ได้แก่:
- เบรกเกอร์หรือฟิวส์จะตัดกระแสลัดวงจรก่อนที่จะเกิดความเสียหายที่เป็นอันตรายหรือไม่?
- คอนแทคเตอร์สามารถทนต่อกระแสและพลังงานที่ไหลผ่าน (let-through current and energy) ได้หรือไม่?
- โอเวอร์โหลดรีเลย์จะสามารถป้องกันมอเตอร์ได้โดยไม่เกิดการทริปโดยไม่จำเป็น (nuisance tripping) หรือไม่?
- ชุดอุปกรณ์ที่เลือกมานั้นตรงกับตารางการประสานการทำงาน (coordination table) ที่ผ่านการทดสอบจากผู้ผลิตหรือไม่?
- ตู้ควบคุมไฟฟ้าได้รับการออกแบบมาให้รองรับกระแสลัดวงจรที่อาจเกิดขึ้นได้หรือไม่?
ในบริบทของชุดสตาร์ทมอเตอร์ตามมาตรฐาน IEC การประสานการทำงานมักจะถูกกล่าวถึงโดยใช้ประเภทของการประสานการทำงาน (coordination types) ห้ามระบุประเภทของการประสานการทำงานหากไม่มีข้อมูลจากผู้ผลิตรองรับสำหรับชุดอุปกรณ์นั้นๆ โดยเฉพาะ.
สำหรับโครงสร้างชุดสตาร์ทมอเตอร์ในภาพรวม โปรดดูที่ คู่มือการเลือกประเภทของสตาร์ทเตอร์มอเตอร์.
ขั้นตอนที่ 9: ตัวอย่างการเลือกอุปกรณ์สำหรับมอเตอร์ขนาด 7.5 กิโลวัตต์
สมมติให้:
- กำลังมอเตอร์: 7.5 กิโลวัตต์
- แรงดันไฟฟ้า: 400 โวลต์ สามเฟส
- กระแสไฟฟ้าเต็มโหลด (FLC) โดยประมาณ: ประมาณ 14-16 แอมป์ ทั้งนี้ให้ตรวจสอบยืนยันจากแผ่นป้ายเนมเพลทอีกครั้ง
- การใช้งาน: ปั๊มน้ำทั่วไป
- วิธีการสตาร์ท: แบบต่อตรง (Direct-on-line)
- ลักษณะการทำงาน: สตาร์ท/หยุดตามปกติ ไม่ใช่การทำงานแบบจ็อกกิ้ง (Jogging)
คอนแทคเตอร์
เลือกคอนแทคเตอร์ที่มีพิกัดมอเตอร์ระดับ AC-3 ซึ่งเหมาะสมกับกำลัง/กระแสของมอเตอร์ที่แรงดัน 400 โวลต์ ห้ามใช้พิกัด AC-1 เป็นเกณฑ์ในการเลือก.
โอเวอร์โหลดรีเลย์
เลือกโอเวอร์โหลดรีเลย์ที่มีช่วงการปรับตั้งครอบคลุมกระแสไฟฟ้าจริงตามแผ่นป้ายเนมเพลทของมอเตอร์ โดยให้ตั้งค่าตามกระแสที่ระบุบนเนมเพลทและตามกฎระเบียบที่เกี่ยวข้อง หากปั๊มมีเวลาในการสตาร์ทปกติ คลาสการทริปแบบมาตรฐานอาจเหมาะสม ทั้งนี้ให้ตรวจสอบกับเวลาในการสตาร์ทจริงอีกครั้ง.
การป้องกันไฟฟ้าลัดวงจร
เลือก MCB, MCCB, MPCB หรือฟิวส์ โดยพิจารณาจาก:
- กระแสลัดวงจรที่มีอยู่
- ขนาดของสายไฟ
- กระแสขณะสตาร์ท
- การประสานการทำงานร่วมกับคอนแทคเตอร์และโอเวอร์โหลดรีเลย์
- มาตรฐานของตู้ควบคุมและข้อกำหนดการติดตั้งในพื้นที่
อย่าเลือกเบรกเกอร์เพียงเพราะมีค่ากระแสแอมแปร์เท่ากับกระแสของมอเตอร์ เบรกเกอร์จะต้องรองรับการสตาร์ทมอเตอร์และยังคงสามารถป้องกันสายไฟและวงจรได้ในสภาวะที่เกิดความผิดปกติ.
แรงดันไฟคอยล์
หากวงจรควบคุมเป็น 24 VDC ให้เลือกคอยล์คอนแทคเตอร์ขนาด 24 VDC แม้ว่ามอเตอร์จะเป็น 400 VAC ก็ตาม แรงดันคอยล์และแรงดันมอเตอร์เป็นการเลือกแยกส่วนกัน.
รายการตรวจสอบสำหรับการเลือกอย่างรวดเร็ว
| สเต็ป | สิ่งที่ต้องตรวจสอบ | ทำไมถึงสำคัญ |
|---|---|---|
| 1 | กระแสโหลดเต็มพิกัดบนเนมเพลทมอเตอร์ | แม่นยำกว่าการประมาณค่าด้วยหน่วย kW |
| 2 | แรงดันไฟฟ้าและความถี่ของแหล่งจ่าย | ส่งผลต่อกระแสไฟฟ้าและพิกัดของผลิตภัณฑ์ |
| 3 | วิธีการสตาร์ท | DOL, สตาร์-เดลต้า, ซอฟต์สตาร์ทเตอร์, VFD |
| 4 | ประเภทของคอนแทคเตอร์ | AC-3 สำหรับการใช้งานมอเตอร์ทั่วไป, AC-4 สำหรับการใช้งานหนัก |
| 5 | ช่วงการตั้งค่าของโอเวอร์โหลดรีเลย์ | ต้องครอบคลุมค่ากระแสเต็มโหลด (FLC) ของมอเตอร์ |
| 6 | คลาสการตัดวงจร (Trip class) | ต้องเหมาะสมกับเวลาในการสตาร์ทและการป้องกันมอเตอร์ |
| 7 | อุปกรณ์ป้องกันไฟฟ้าลัดวงจร | ต้องสอดคล้องกับค่ากระแสลัดวงจรที่จุดติดตั้ง (PSCC) และการป้องกันสายไฟ |
| 8 | การประสานงาน | อุปกรณ์ต้องทำงานร่วมกันได้อย่างปลอดภัยในระบบ |
| 9 | แรงดันไฟคอยล์ | ต้องสอดคล้องกับวงจรควบคุม |
| 10 | ตู้ควบคุมและสภาพแวดล้อม | ความร้อน ฝุ่น แรงสั่นสะเทือน และพื้นที่ในตู้ส่งผลต่อความน่าเชื่อถือในการทำงาน |
ข้อผิดพลาดในการเลือกทั่วไป
ข้อผิดพลาดที่ 1: การเลือกคอนแทคเตอร์โดยใช้กระแส AC-1
AC-1 ไม่ใช่ประเภทการใช้งานสำหรับการสลับมอเตอร์ทั่วไป สำหรับมอเตอร์กรงกระรอกส่วนใหญ่ ให้ตรวจสอบค่า AC-3 สำหรับการกลับทางหมุน การเดินเครื่องแบบจังหวะ (Inching) หรือการเบรกด้วยไฟฟ้า (Plugging) ให้ตรวจสอบค่า AC-4 หรือคำแนะนำจากผู้ผลิต.
ข้อผิดพลาดที่ 2: การใช้ค่ากำลังมอเตอร์ (kW) โดยไม่ตรวจสอบกระแสที่ระบุบนแผ่นป้ายชื่อ (Nameplate)
ค่า kW มีประโยชน์สำหรับการประมาณการ แต่กระแสที่ระบุบนแผ่นป้ายชื่อเป็นเกณฑ์ที่ดีกว่าสำหรับการตั้งค่าโอเวอร์โหลดรีเลย์และการเลือกอุปกรณ์ขั้นสุดท้าย.
ข้อผิดพลาดที่ 3: การอนุมานว่าเบรกเกอร์สามารถป้องกันมอเตอร์จากภาวะโอเวอร์โหลดได้ทุกรูปแบบ
เบรกเกอร์อาจป้องกันไฟฟ้าลัดวงจรและโอเวอร์โหลดของสายป้อนได้ แต่การป้องกันมอเตอร์จากความร้อนเกินพิกัดมักจำเป็นต้องใช้โอเวอร์โหลดรีเลย์, อุปกรณ์ป้องกันโอเวอร์โหลดแบบอิเล็กทรอนิกส์ หรือ MPCB.
ข้อผิดพลาดที่ 4: การตั้งค่าทริปสำหรับไฟฟ้าลัดวงจรต่ำเกินไป
กระแสขณะสตาร์ทมอเตอร์อาจสูงกว่ากระแสโหลดเต็มที่หลายเท่า หากการตั้งค่ากระแสฉับพลันหรือกราฟการทริปมีความไวเกินไป มอเตอร์อาจทริปในระหว่างการสตาร์ทตามปกติได้.
ข้อผิดพลาดที่ 5: การละเลยรอบการทำงาน (Duty Cycle)
ปั๊มน้ำที่เริ่มทำงานเพียงไม่กี่ครั้งต่อวันนั้นแตกต่างจากรอก เครน สายพานลำเลียงแบบกลับทาง หรือเครื่องจักรที่ต้องเดินเครื่องทีละน้อย (Inching) รอบการทำงานของการสับเปลี่ยนมีผลต่อการเลือกคอนแทคเตอร์.
ข้อผิดพลาดที่ 6: การละเลยระดับกระแสลัดวงจร (Fault Level)
เบรกเกอร์ที่มีพิกัดกระแสเหมาะสมอาจยังไม่สามารถใช้งานได้ หากค่าความสามารถในการตัดกระแสลัดวงจร (Breaking Capacity) ต่ำกว่ากระแสลัดวงจรที่อาจเกิดขึ้นจริง.
ข้อผิดพลาดที่ 7: การใช้แรงดันไฟฟ้าควบคุมและแรงดันไฟฟ้ากำลังปนกัน
มอเตอร์อาจใช้แรงดัน 400 VAC ในขณะที่คอยล์ของคอนแทคเตอร์อาจเป็น 24 VDC หรือ 230 VAC ควรตรวจสอบวงจรควบคุมเสมอ.
คำถามที่พบบ่อย
ฉันสามารถเลือกคอนแทคเตอร์โดยดูจากค่า kW ของมอเตอร์เพียงอย่างเดียวได้หรือไม่?
ไม่ได้ ค่า kW ของมอเตอร์เป็นเพียงจุดเริ่มต้นเท่านั้น แต่การเลือกขั้นสุดท้ายควรพิจารณาจากกระแสเต็มโหลดของมอเตอร์ แรงดันไฟฟ้า ประเภทการใช้งาน (Utilization Category) เช่น AC-3 หรือ AC-4 รอบการทำงาน และตารางพิกัดของผู้ผลิต.
พิกัดคอนแทคเตอร์แบบ AC-3 คืออะไร?
AC-3 คือประเภทการใช้งานตามมาตรฐาน IEC ที่ใช้กันทั่วไปสำหรับการสตาร์ทมอเตอร์แบบกรงกระรอกและการตัดวงจรหลังจากมอเตอร์ทำความเร็วถึงระดับใช้งานแล้ว ซึ่งเป็นพิกัดสำคัญสำหรับการใช้งานคอนแทคเตอร์มอเตอร์มาตรฐานทั่วไป.
พิกัดคอนแทคเตอร์แบบ AC-4 คืออะไร?
AC-4 ครอบคลุมการใช้งานมอเตอร์ที่หนักหน่วงกว่า เช่น การเดินเครื่องแบบจังหวะ (Inching) การเบรกด้วยกระแสไฟฟ้า (Plugging) และการกลับทางหมุน คอนแทคเตอร์ที่เหมาะสำหรับ AC-3 อาจไม่เหมาะสำหรับ AC-4 แม้จะเป็นมอเตอร์ที่มีกำลังเท่ากันก็ตาม.
ฉันจำเป็นต้องมีโอเวอร์โหลดรีเลย์หรือไม่ หากฉันมีเซอร์กิตเบรกเกอร์อยู่แล้ว?
โดยส่วนใหญ่แล้วจำเป็น เซอร์กิตเบรกเกอร์ทั่วไปทำหน้าที่ป้องกันไฟฟ้าลัดวงจรและป้องกันสายเมน แต่การป้องกันมอเตอร์เกินพิกัด (Overload) มักต้องใช้โอเวอร์โหลดรีเลย์, อิเล็กทรอนิกส์โอเวอร์โหลดรีเลย์ หรือ MPCB ที่เลือกขนาดให้เหมาะสมกับกระแสของมอเตอร์.
MPCB และโอเวอร์โหลดรีเลย์มีความแตกต่างกันอย่างไร?
โอเวอร์โหลดรีเลย์ทำหน้าที่ป้องกันมอเตอร์เมื่อเกิดกระแสเกินต่อเนื่อง แต่โดยปกติแล้วจำเป็นต้องมีอุปกรณ์ป้องกันไฟฟ้าลัดวงจรแยกต่างหาก ส่วน MPCB สามารถป้องกันได้ทั้งมอเตอร์เกินพิกัดและไฟฟ้าลัดวงจรในอุปกรณ์เดียว หากมีการเลือกขนาดและพิกัดอย่างถูกต้อง.
MCB สามารถป้องกันมอเตอร์ได้หรือไม่?
MCB อาจถูกนำมาใช้ในวงจรมอเตอร์ขนาดเล็กบางประเภทเพื่อเป็นส่วนหนึ่งของระบบป้องกัน แต่ไม่ใช่โซลูชันการป้องกันมอเตอร์ที่สมบูรณ์แบบโดยอัตโนมัติ จำเป็นต้องตรวจสอบกระแสขณะสตาร์ท กราฟการทริป การป้องกันสายไฟ พิกัดการทนกระแสลัดวงจร และการป้องกันกระแสเกินให้ครบถ้วน.
ฉันจะเลือกขนาดเบรกเกอร์สำหรับมอเตอร์ได้อย่างไร?
เริ่มต้นจากกระแสโหลดเต็มที่ของมอเตอร์ ขนาดสายไฟ กระแสขณะสตาร์ท และกระแสลัดวงจรที่คาดการณ์ไว้ จากนั้นจึงเลือกเบรกเกอร์, MPCB, MCCB หรือฟิวส์ที่รองรับการสตาร์ทตามปกติ สามารถป้องกันสายไฟได้ และมีพิกัดการตัดกระแสที่เพียงพอ.
ทำไมเบรกเกอร์มอเตอร์ของฉันถึงทริปขณะสตาร์ท?
สาเหตุทั่วไป ได้แก่ กระแสขณะสตาร์ทสูงเกินกราฟการทริป, แรงดันไฟฟ้าต่ำ, ความเฉื่อยของโหลดมากเกินไป, เลือกประเภทเบรกเกอร์ผิด, การตั้งค่ากระแสฉับพลันไม่ถูกต้อง, แรงดันไฟฟ้าตก, มอเตอร์โหลดเกินทางกล หรือวิธีการสตาร์ทไม่เหมาะสม.
ฉันสามารถใช้เบรกเกอร์ขนาดใหญ่ขึ้นเพื่อหยุดการทริปที่น่ารำคาญได้หรือไม่?
ไม่ควรทำหากยังไม่ได้ตรวจสอบการป้องกันสายไฟ การป้องกันมอเตอร์ และการตัดกระแสเมื่อเกิดความผิดปกติ การเลือกเบรกเกอร์ขนาดใหญ่เกินไปอาจเป็นการปกปิดอาการผิดปกติ แต่จะทำให้สายไฟหรือมอเตอร์ขาดการป้องกันที่เหมาะสม.
วิธีที่ปลอดภัยที่สุดในการเลือกอุปกรณ์สตาร์ทมอเตอร์คืออะไร?
ใช้กระแสไฟฟ้าตามแผ่นป้ายมอเตอร์ ลักษณะการใช้งาน วิธีการสตาร์ท ระดับกระแสลัดวงจร การตั้งค่ารีเลย์โอเวอร์โหลด ประเภทการใช้งานของคอนแทคเตอร์ และตารางการประสานงานของผู้ผลิตสำหรับการเลือกชุดอุปกรณ์.
สรุป
กำลังของมอเตอร์เป็นข้อมูลที่มีประโยชน์แต่ไม่เพียงพอ การเลือกชุดสตาร์ทมอเตอร์ที่เชื่อถือได้ต้องเริ่มจากกระแสโหลดเต็มที่ จากนั้นจึงตรวจสอบภาระงานของคอนแทคเตอร์ การป้องกันโอเวอร์โหลด การป้องกันกระแสลัดวงจร การประสานงาน และแรงดันไฟฟ้าควบคุม.
สำหรับตู้ควบคุมมอเตอร์แรงดันต่ำส่วนใหญ่:
- เลือกคอนแทคเตอร์ตามภาระงานมอเตอร์แบบ AC-3 หรือ AC-4 ไม่ใช่กระแสแบบ AC-1
- ตั้งค่าการป้องกันโอเวอร์โหลดจากกระแสไฟฟ้าตามแผ่นป้ายมอเตอร์
- เลือกอุปกรณ์ป้องกันกระแสลัดวงจรโดยพิจารณาจากระดับความผิดพร่อง ขนาดสายไฟ กระแสขณะสตาร์ท และการประสานงาน
- ตรวจสอบชุดสตาร์ทมอเตอร์โดยรวม ไม่ใช่พิจารณาเพียงแค่อุปกรณ์แต่ละตัวแยกกัน
สำหรับการเลือกอุปกรณ์ควบคุมมอเตอร์ VIOX โปรดตรวจสอบ แน่นอ Contactor, เอาไว้จับภาพความร้อนมากเกินไปส่งต่อ, และคู่มือสนับสนุนที่เกี่ยวข้องบน คอนแทคเตอร์เทียบกับสตาร์ทเตอร์มอเตอร์, การเลือกใช้รีเลย์ป้องกันกระแสเกินแบบความร้อน (Thermal Overload Relay), ความแตกต่างระหว่างรีเลย์ป้องกันกระแสเกินแบบความร้อนกับ MPCB, และ คอนแทคเตอร์เทียบกับเซอร์กิตเบรกเกอร์.
