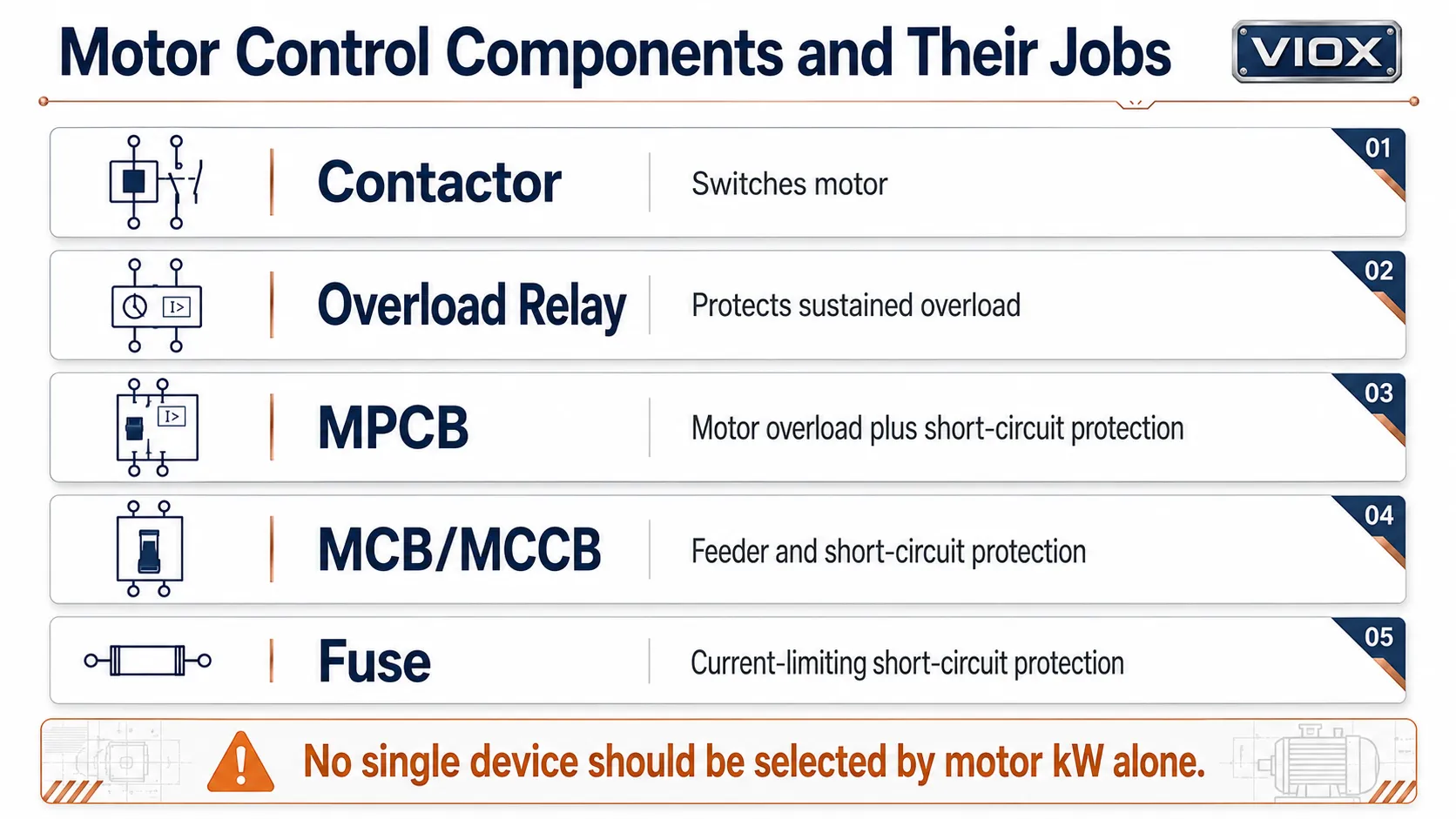
အဓိကစည်းမျဉ်း - မော်တာ၏ kW ပမာဏတစ်ခုတည်းကိုသာ ကြည့်၍ ရွေးချယ်ခြင်းမပြုရ
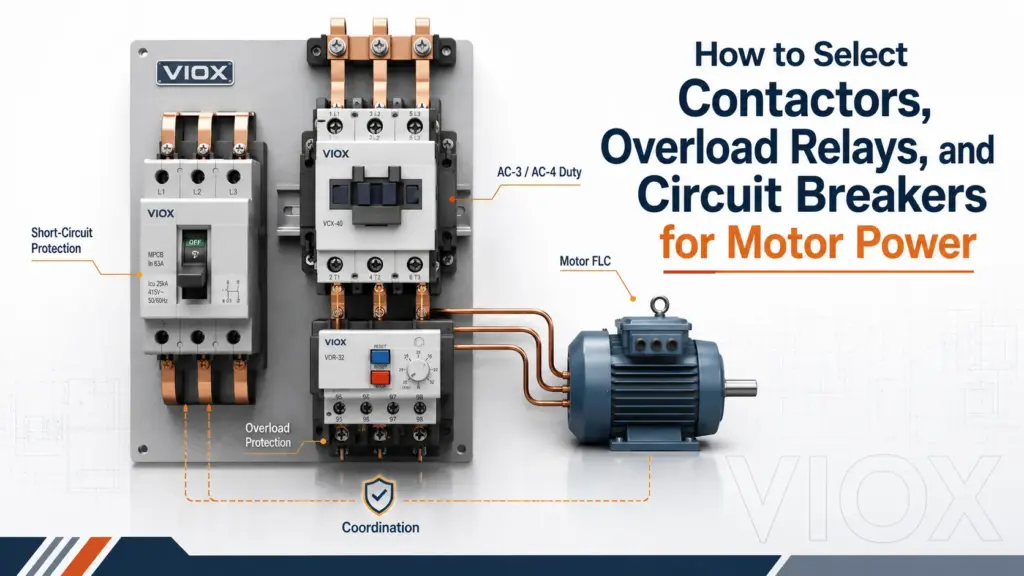
မော်တာပါဝါသည် အစပြုရမည့်အချက်သာ ဖြစ်သည်။ Contactor၊ Overload relay နှင့် Circuit breaker တို့ကို မှန်ကန်စွာရွေးချယ်ရန်အတွက် ဦးစွာ မော်တာပါဝါကို အောက်ပါအတိုင်း ပြောင်းလဲတွက်ချက်ရမည် မော်တာ၏ Full-load current (FLC), ထို့နောက် မော်တာ၏ ဗို့အား၊ စတင်မောင်းနှင်သည့်နည်းလမ်း၊ အသုံးပြုပုံအမျိုးအစား (Utilization category)၊ Duty cycle၊ Short-circuit level၊ Overload ကာကွယ်မှုနှင့် စက်ပစ္စည်းများအကြား ချိတ်ဆက်မှု (Coordination) တို့ကို စစ်ဆေးရမည်။.
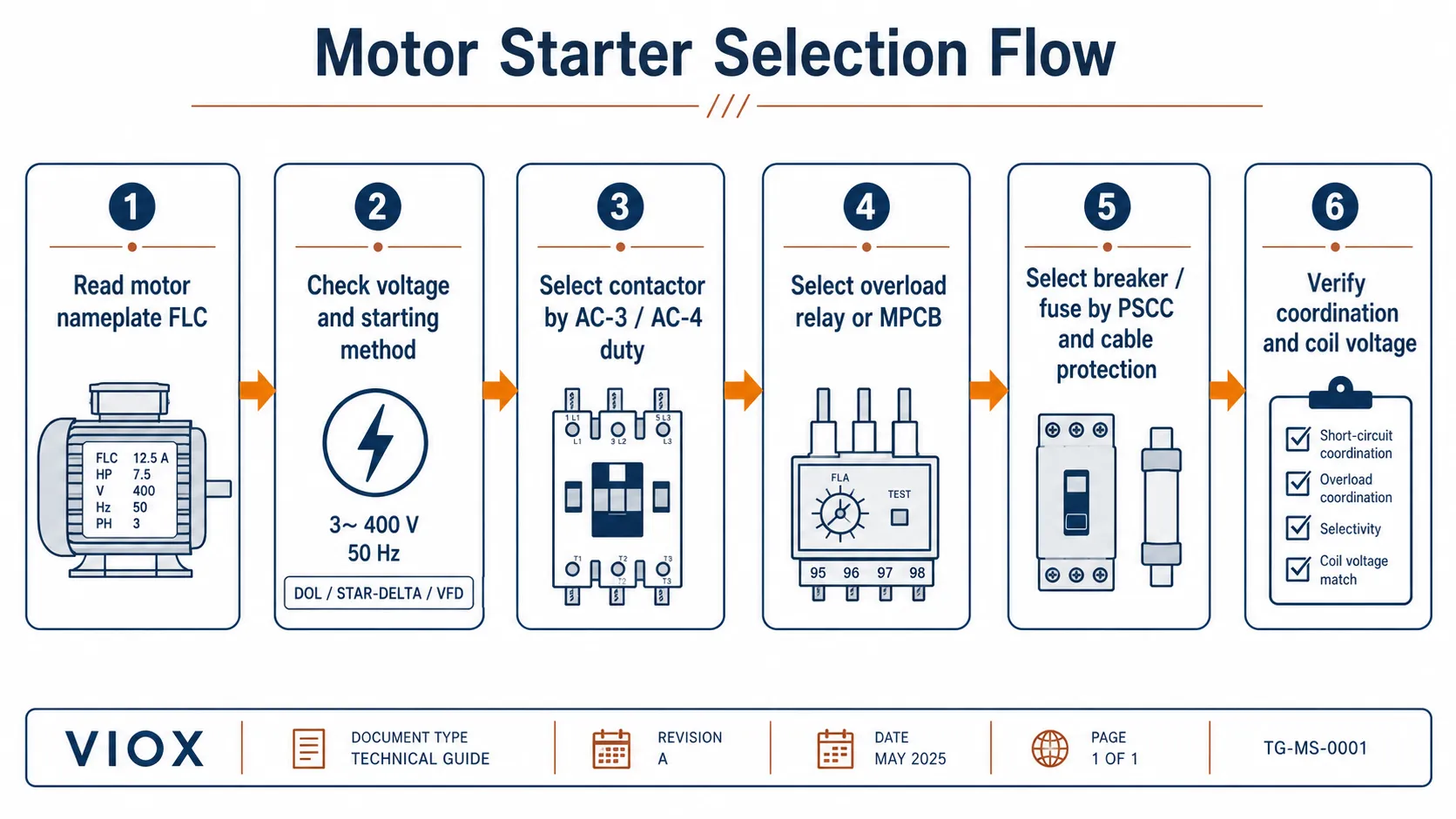
ဗို့အားနိမ့် မော်တာထိန်းချုပ်ခန်း (Low-voltage motor panels) အများစုအတွက် -
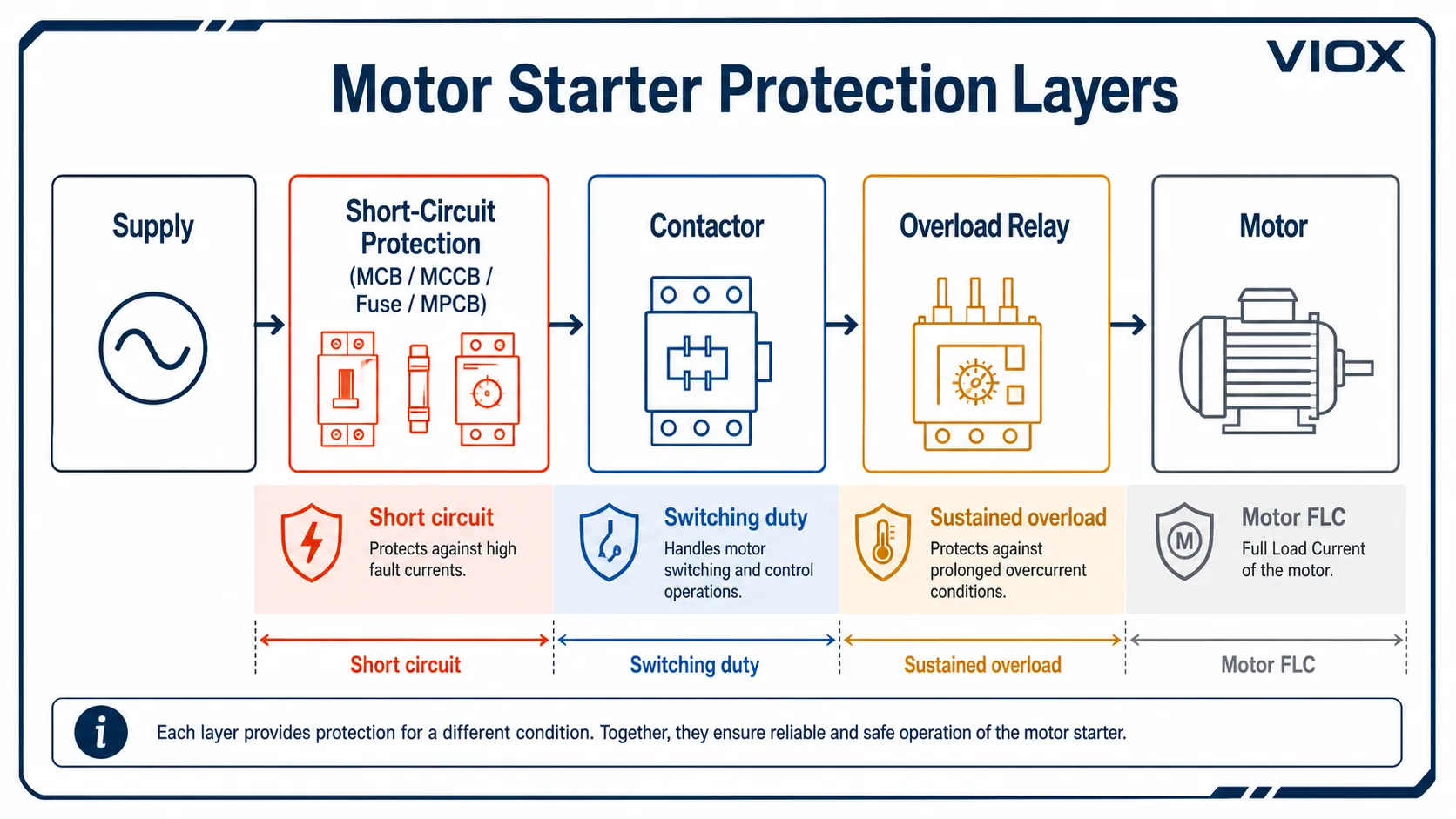
- ဟိ contactor မော်တာကို အဖွင့်/အပိတ် ပြုလုပ်ပေးသည်။.
- ဟိ overload relay မော်တာကို ကြာရှည်ခံသော Overload ဖြစ်ခြင်းမှ ကာကွယ်ပေးသည်။.
- ဟိ MCB၊ MCCB၊ Fuse သို့မဟုတ် MPCB ဝါယာရှော့ကာကွယ်မှုနှင့် ဖိဒါ (feeder) ကာကွယ်မှုကို ပံ့ပိုးပေးသည်။.
- တဲ့ motor starter ဤကိရိယာများအား စနစ်တကျ ပေါင်းစပ်တပ်ဆင်ထားခြင်းဖြစ်သည်။.
အကြီးမားဆုံးအမှားမှာ kW တန်ဖိုးကို အခြေခံ၍ မြှောက်ဖော်ကိန်းတစ်ခုတည်းဖြင့် ကွန်တက်တာ (contactor) နှင့် ဘရိတ်ကာ (breaker) ကို တိုက်ရိုက်ရွေးချယ်ခြင်းဖြစ်သည်။ ပန့် (pump)၊ ကြိတ်စက် (crusher) နှင့် နောက်ပြန်လှည့်နိုင်သော လျှပ်စစ်မော်တာ (reversing hoist) တို့တွင် အသုံးပြုသည့် 7.5 kW မော်တာများသည် မတူညီသော switching duty၊ overload class နှင့် ဝါယာရှော့ကာကွယ်မှု လိုအပ်ချက်များ ရှိနိုင်ပါသည်။.
အကယ်၍ သင်သည် အခြေခံကိရိယာများ၏ နှိုင်းယှဉ်ချက်ကို ဦးစွာသိရှိလိုပါက၊ ဤနေရာတွင် ကြည့်ရှုပါ။ Contactor vs Motor Starter. ဤလမ်းညွှန်ချက်သည် လက်တွေ့ရွေးချယ်မှုအပေါ် အဓိကထားပါသည်။.
မော်တာထိန်းချုပ်ရေး အစိတ်အပိုင်းများနှင့် ၎င်းတို့၏ လုပ်ဆောင်ချက်များ
| ကိရိယာ | အဓိကလုပ်ဆောင်ချက် | ရွေးချယ်မှုအခြေခံ | အသုံးများသောအမှား |
|---|---|---|---|
| Contactor | မော်တာ၏ ပါဝါကို အဖွင့်/အပိတ် ပြုလုပ်ပေးသည်။ | AC-3 သို့မဟုတ် AC-4 မော်တာအဆင့်သတ်မှတ်ချက်၊ ဗို့အား၊ လုပ်ငန်းစဉ်စက်ဝန်း (duty cycle) နှင့် ကွိုင်ဗို့အား။ | AC-1 ခုခံမှုဆိုင်ရာ လျှပ်စီးကြောင်းအဆင့်သတ်မှတ်ချက်ဖြင့် ရွေးချယ်ခြင်း။ |
| အပူချိန်ထိန်း သို့မဟုတ် အီလက်ထရောနစ် ဝန်ပိုကာကွယ်ရေးစက် (Overload relay)။ | မော်တာအား ကြာရှည်စွာ ဝန်ပိုခြင်းမှ ကာကွယ်ပေးသည်။ | မော်တာ၏ နာမည်ပြား (Nameplate) တွင်ပါရှိသော FLC၊ Trip class နှင့် Reset mode။ | Breaker တပ်ဆင်ထားပြီးဖြစ်၍ Overload ကာကွယ်မှုကို ချန်လှပ်ထားခြင်း။ |
| MPCB | မော်တာ၏ ဝန်ပိုခြင်းနှင့် ဝါယာရှော့ဖြစ်ခြင်းတို့ကို ကိရိယာတစ်ခုတည်းဖြင့် ကာကွယ်ပေးခြင်း။ | မော်တာလျှပ်စီးကြောင်းပမာဏ၊ ဖြတ်တောက်နိုင်စွမ်း (Breaking capacity) နှင့် ညှိနှိုင်းဆောင်ရွက်မှု (Coordination) | သာမန် MCB တစ်ခုကဲ့သို့ သဘောထား၍ အသုံးပြုခြင်း |
| MCB/MCCB | Feeder နှင့် ဝါယာရှော့ကာကွယ်ရေးစနစ် | PSCC၊ ကေဘယ်ကြိုးအရွယ်အစား၊ Trip curve/settings နှင့် ညှိနှိုင်းဆောင်ရွက်မှု | မော်တာစတင်လည်ပတ်ချိန်အတွက် Instantaneous trip ကို အလွန်နိမ့်စွာ သတ်မှတ်ထားခြင်း |
| ကြိယာ | ဝါယာရှော့ကာကွယ်ရေးစနစ်၊ များသောအားဖြင့် လျှပ်စီးကြောင်းကန့်သတ်နိုင်စွမ်း မြင့်မားခြင်း | ဖျူးစ်အမျိုးအစား (Fuse class)၊ ဖြတ်တောက်နိုင်စွမ်း နှင့် ညှိနှိုင်းဆောင်ရွက်မှု | မော်တာလုပ်ငန်းစဉ်အတွက် မှားယွင်းသော ဖျူးစ်အမျိုးအစားကို အသုံးပြုခြင်း |
Contactor တစ်ခုသည် overload ကာကွယ်ပေးသည့်ကိရိယာမဟုတ်ပါ။ အခြေခံ overload relay တစ်ခုသည် short-circuit ကာကွယ်ပေးသည့်ကိရိယာမဟုတ်ပါ။ ယေဘုယျ MCB တစ်ခုသည် မော်တာကာကွယ်ရေးကိရိယာအဖြစ် အလိုအလျောက်သက်ရောက်မှုမရှိပါ။ ထိုကန့်သတ်ချက်များသည် အရေးကြီးပါသည်။.
အဆင့် ၁ - မော်တာပါဝါကို Full-Load Current သို့ ပြောင်းလဲခြင်း
သုံးဖက်မြင် (three-phase) မော်တာတစ်ခုအတွက် လိုင်းလျှပ်စီးကြောင်း (line current) ၏ ပထမဆုံးခန့်မှန်းချက်မှာ -
I = P / (sqrt(3) x V x PF x eta)Where:
ငါ= အမ်ပီယာဖြင့်ပြသော မော်တာလျှပ်စီးကြောင်းP= ရရှိနိုင်သော အချက်အလက်ပေါ်မူတည်၍ ဝပ် (watts) ဖြင့်ပြသော မော်တာ၏ input သို့မဟုတ် output ပါဝါv= လိုင်းနှစ်လိုင်းကြား ဗို့အား (line-to-line voltage)PF= ပါဝါဖက်တာ (Power factor)eta (အီတာ)= စွမ်းဆောင်ရည်
အကယ်၍ သင်သည် မော်တာ၏ output ပါဝါကို kW ဖြင့်သာ သိရှိပါက၊ ဤဖော်မြူလာကို အသုံးပြု၍ ခန့်မှန်းပြီးနောက် မော်တာ၏ nameplate နှင့် တိုက်ဆိုင်စစ်ဆေးပါ။ နောက်ဆုံးရွေးချယ်မှုတွင် nameplate ပေါ်ရှိ full-load current ကို အသုံးပြုရပါမည်။, တွက်ချက်ထားသော လျှပ်စီးကြောင်းတစ်ခုတည်းသာ မဟုတ်ပါ။.
ဥပမာ:
7.5 kW, 400 V သုံးဖက်မြင် (three-phase) မော်တာတစ်ခုအတွက် ခန့်မှန်းခြေ ပါဝါဖက်တာ 0.85 နှင့် စွမ်းဆောင်ရည် 0.90 ရှိသည်ဆိုပါစို့။
I = 7500 / (1.732 x 400 x 0.85 x 0.90)I ≈ 14.2 Aဤခန့်မှန်းချက်သည် သင့်အား စတင်ရန် အထောက်အကူပြုပါလိမ့်မည်။ အမှန်တကယ် Nameplate တွင်ဖော်ပြထားသော လျှပ်စီးကြောင်းမှာ ကွဲပြားနိုင်ပါသည်။ မော်တာဒီဇိုင်း၊ စွမ်းဆောင်ရည်အဆင့်၊ ကြိမ်နှုန်း၊ ဝန်ဆောင်မှုအချက် (service factor)၊ ပတ်ဝန်းကျင်အခြေအနေနှင့် ထုတ်လုပ်သူ၏ ဒီဇိုင်းတို့သည် အမှန်တကယ်တန်ဖိုးအပေါ် သက်ရောက်မှုရှိပါသည်။.
ပိုမိုကျယ်ပြန့်သော ဗို့အားနိမ့်လျှပ်စစ်ဆိုင်ရာ ဖော်မြူလာများအတွက် ကြည့်ရှုပါ။ ဗို့အားနိမ့် လျှပ်စစ်ပန်နယ် ဒီဇိုင်းနှင့် ပြုပြင်ထိန်းသိမ်းမှုအတွက် လျှပ်စစ်ဆိုင်ရာ ဖော်မြူလာများ.
အဆင့် ၂ - AC-3 သို့မဟုတ် AC-4 လုပ်ဆောင်ချက်အလိုက် Contactor ကို ရွေးချယ်ခြင်း
IEC စံနှုန်းပါ မော်တာထိန်းချုပ်မှုအတွက် Contactor များကို ယေဘုယျ အမ်ပီယာသတ်မှတ်ချက်တစ်ခုတည်းဖြင့် ရွေးချယ်ခြင်းမဟုတ်ပါ။ အသုံးပြုမှုအမျိုးအစား (utilization category) သည် အရေးကြီးပါသည်။.
| အသုံးပြုမှု အမျိုးအစား | ပုံမှန်လုပ်ဆောင်ချက် | ရွေးချယ်မှုအတွက် ဆိုလိုရင်း |
|---|---|---|
| သတ္မွတ္အ-၁ | မ-inductive သို့မဟုတ်အနည်းငယ် inductive ဝန် | Resistive loads များ၊ ပုံမှန်မော်တာစတင်သည့် လုပ်ငန်းစဉ်မဟုတ်ပါ |
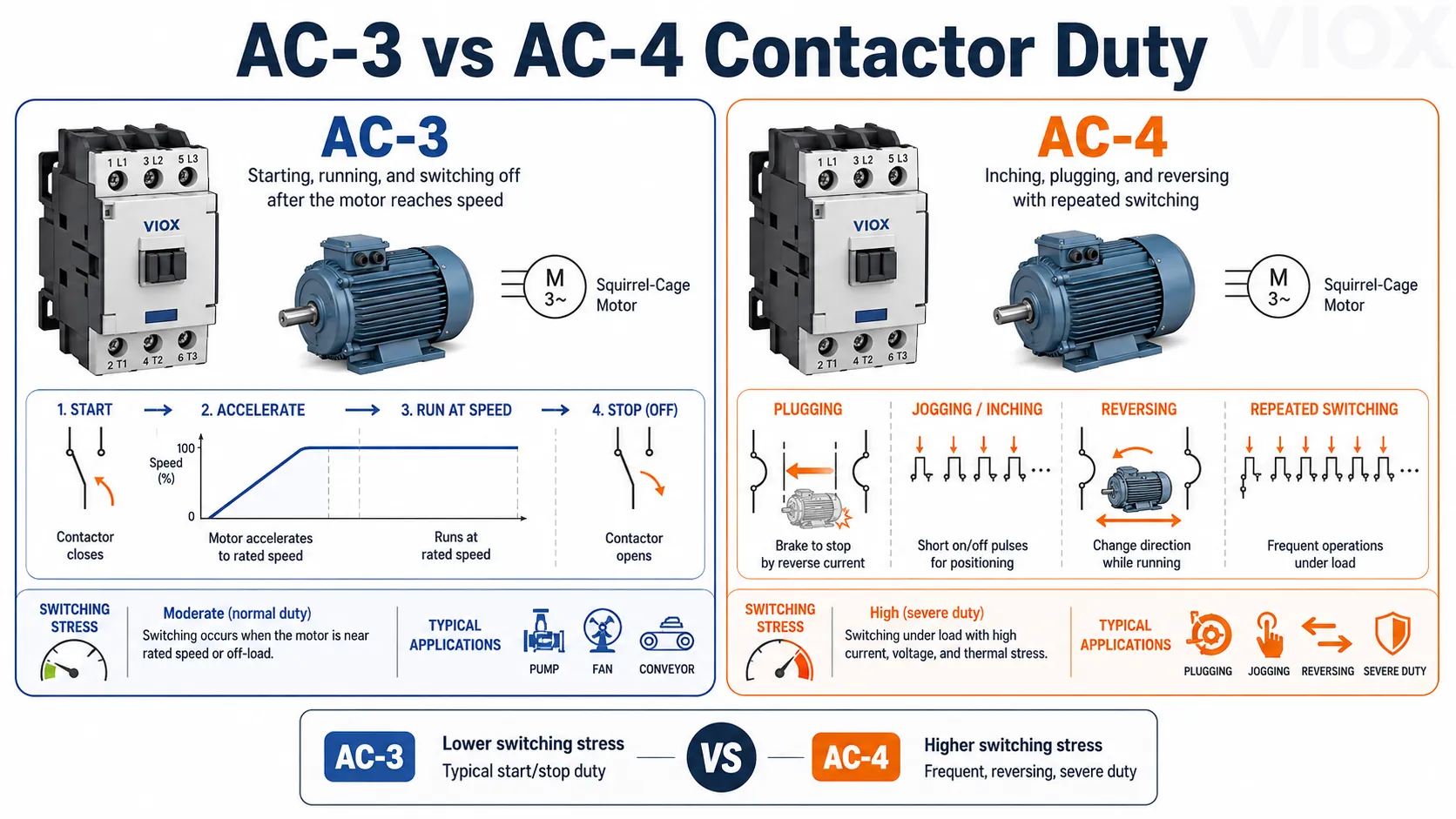
| သတ္မွတ္အ-၃ | Squirrel-cage မော်တာစတင်ခြင်းနှင့် အမြန်နှုန်းရောက်ရှိပြီးနောက် ပိတ်ခြင်း | ပန့်များ၊ ပန်ကာများ၊ ကွန်ပရက်ဆာများနှင့် ကွန်ဗေယာများအတွက် အသုံးများသော လုပ်ငန်းစဉ် |
| AC-4 | စတင်ခြင်း၊ plugging၊ inching နှင့် reversing | AC-3 ထက် ပိုမိုပြင်းထန်သည်၊ ထို့ကြောင့် ကွန်တက်တာ (contactor) သည် ပိုမိုကြီးမားရန် လိုအပ်နိုင်သည် |
| သတ္မွတ္အ-၁၅ | AC လျှပ်စစ်သံလိုက်ဝန်အားများကို ထိန်းချုပ်ခြင်း | အရန်/ထိန်းချုပ်မှုဆိုင်ရာ အဆက်အသွယ်များ (အဓိကမော်တာပါဝါ အဆက်အသွယ်များ မဟုတ်ပါ) |
ပုံမှန် Direct-on-line မော်တာခလုတ်ဖွင့်/ပိတ်ခြင်းအတွက် AC-3 သည် အဓိကကျသော Contactor အဆင့်သတ်မှတ်ချက်ဖြစ်သည်။ ပြောင်းပြန်လှည့်ခြင်း၊ အရှိန်မြှင့်ခြင်း၊ ရပ်တန့်ခြင်း၊ ကရိန်း၊ လျှပ်စစ်ဆွဲစက် သို့မဟုတ် မကြာခဏ အသေးစားရွေ့လျားမှုများအတွက် AC-4 သို့မဟုတ် ပိုမိုပြင်းထန်သော ဝန်အားအခြေအနေများကို စစ်ဆေးရန် လိုအပ်သည်။.
စက်ပစ္စည်းပေါ်တွင် ရိုက်နှိပ်ထားသော AC-1 လျှပ်စီးကြောင်းကိုသာ ကြည့်၍ မော်တာ Contactor ကို မရွေးချယ်ပါနှင့်။ AC-1 သည် Resistive (သို့မဟုတ်) အနည်းငယ်သာ Inductive ဖြစ်သော ဝန်အားများအတွက်ဖြစ်သည်။ AC-1 အဆင့်သတ်မှတ်ချက် မြင့်မားသော Contactor တစ်ခုသည် AC-3 သို့မဟုတ် AC-4 အောက်တွင် မော်တာအဆင့်သတ်မှတ်ချက် အလွန်နည်းနိုင်ပါသည်။.
VIOX ထုတ်ကုန် အကဲဖြတ်ခြင်းအတွက် အောက်ပါတို့ကို ကြည့်ပါ သတ္မွတ္အ Contactor ထုတ်ကုန်စာမျက်နှာ။.
အဆင့် ၃- Contactor ဗို့အား၊ ပိုလ် (Poles) နှင့် ကွိုင်ဗို့အား (Coil Voltage) တို့ကို စစ်ဆေးပါ
မော်တာ၏ ဝန်အားအဆင့်သတ်မှတ်ချက်ကို ရွေးချယ်ပြီးနောက် အောက်ပါတို့ကို အတည်ပြုပါ-
- number of poles
- rated operational voltage
- လက်ရှိဗို့အားတွင် မော်တာ၏ လျှပ်စီးကြောင်း (သို့မဟုတ်) kW အဆင့်သတ်မှတ်ချက်
- AC-3 သို့မဟုတ် AC-4 အဆင့်သတ်မှတ်ချက်
- လျှပ်စစ်ပတ်လမ်း ဆက်သွယ်ခြင်းနှင့် ဖြတ်တောက်ခြင်း လုပ်ငန်းစဉ်
- လုပ်ငန်းလည်ပတ်မှုစက်ဝန်းအတွက် လျှပ်စစ်ဆိုင်ရာ ကြံ့ခိုင်မှု
- စက်မှုဆိုင်ရာ ကြံ့ခိုင်မှု
- အရန်အဆက်အသွယ် (Auxiliary contact) လိုအပ်ချက်များ
- ကွိုင်ဗို့အားနှင့် ထိန်းချုပ်ပတ်လမ်း အမျိုးအစား
ကွိုင်ဗို့အားသည် လုပ်ငန်းခွင်တွင် မကြာခဏ မှားယွင်းလေ့ရှိသည့်အချက်ဖြစ်သည်။ မော်တာသည် 400 VAC ဖြစ်နိုင်သော်လည်း ထိန်းချုပ်ပတ်လမ်းမှာ 24 VDC၊ 110 VAC သို့မဟုတ် 230 VAC ဖြစ်နိုင်သည်။ Contactor ကွိုင်သည် မော်တာပါဝါပတ်လမ်းနှင့်မဟုတ်ဘဲ ထိန်းချုပ်ပတ်လမ်းနှင့် ကိုက်ညီရမည်။.
အသုံးပြုမည့် လုပ်ငန်းစဉ်အမျိုးအစားကိုလည်း စစ်ဆေးပါ -
- ပုံမှန်ပန့် သို့မဟုတ် ပန်ကာ စတင်ခြင်း/ရပ်တန့်ခြင်း
- မကြာခဏ အဖွင့်အပိတ်ပြုလုပ်ခြင်း
- ရှေ့သို့/နောက်သို့ လည်ပတ်ခြင်း
- စတား-ဒယ်လ်တာ စတားတာ (Star-delta starter)
- ဆော့ဖ်စတားတာ ဘိုင်ပတ်စ် (Soft starter bypass)
- VFD အဝင် သို့မဟုတ် ဘိုင်ပတ်စ် ကွန်တက်တာ (VFD input or bypass contactor)
- ကက်ပက်စီတာ စဝစ်ချ်အသုံးပြုခြင်း (အကျုံးဝင်ပါက)
တာဝန်ယူရသည့် လုပ်ငန်းစဉ်တစ်ခုချင်းစီအလိုက် သင့်လျော်သော ကွန်တက်တာရွေးချယ်မှု ပြောင်းလဲနိုင်ပါသည်။.
အဆင့် ၄ - Overload Relay ကို ရွေးချယ်ခြင်း
မော်တာများသည် ဝန်ပိုခြင်း (overload) ကြာရှည်စွာဖြစ်ခြင်း၊ မော်တာပတ်လမ်းပိတ်ဆို့ခြင်း (stalled rotor)၊ အဆင့်ပြတ်တောက်ခြင်း (phase loss) သို့မဟုတ် စက်ပိုင်းဆိုင်ရာ ဝန်ပိုပြဿနာများကြောင့် အပူလွန်ကဲနိုင်သဖြင့် Overload ကာကွယ်မှု လိုအပ်ပါသည်။.
Overload Relay တစ်ခုကို အောက်ပါအချက်များဖြင့် ရွေးချယ်လေ့ရှိသည် -
- မော်တာအမည်ပြား (nameplate) တွင်ဖော်ပြထားသော full-load current
- Overload relay ၏ ချိန်ညှိနိုင်သော လျှပ်စီးကြောင်းပမာဏ (adjustable current range)
- ခရီးသင်တန်း
- Manual သို့မဟုတ် Automatic reset စနစ်
- လိုအပ်ပါက အဆင့်ပြတ်တောက်မှုကို သိရှိနိုင်စွမ်း (phase-loss sensitivity)
- Contactor နှင့် ကိုက်ညီမှုရှိခြင်း
- ပတ်ဝန်းကျင်အပူချိန်လျော်ကြေး (အကျုံးဝင်ပါက)
ဝန်ပိုခြင်း (Overload) သတ်မှတ်ချက်သည် ပုံမှန်အားဖြင့် မော်တာ၏ နာမည်ပြား (Nameplate) တွင်ဖော်ပြထားသော လျှပ်စီးကြောင်းနှင့် သက်ဆိုင်ရာ ဒေသန္တရစည်းမျဉ်းများ သို့မဟုတ် ထုတ်လုပ်သူ၏ လမ်းညွှန်ချက်များအပေါ် အခြေခံသင့်သည်။.
Trip class သည် အရေးကြီးသည်
Trip class သည် သတ်မှတ်ထားသော ဝန်ပိုမှုအခြေအနေများအောက်တွင် ဝန်ပိုခြင်းကို ကာကွယ်ပေးသည့် relay (Overload relay) သည် မည်မျှမြန်ဆန်စွာ ဖြတ်တောက် (Trip) ပေးသည်ကို ဖော်ပြသည်။ မော်တာထိန်းချုပ်မှုဆိုင်ရာ အခြေအနေအများစုတွင် Class 10၊ Class 20 နှင့် Class 30 တို့မှာ အသုံးများသော အမျိုးအစားများဖြစ်သည်။.
| Trip class | ပုံမှန်အသုံးပြုမှု |
|---|---|
| Class 10 | ပုံမှန်စတင်ချိန်ရှိသော စံမော်တာများ |
| Class 20 | အရှိန်မြှင့်တင်ချိန် ပိုမိုကြာမြင့်သော ဝန်များ (Loads) |
| Class 30 | အရှိန်မြှင့်တင်ချိန် ပိုမိုလိုအပ်သော လေးလံသည့် စတင်ဝန်များ (Heavy starting loads) |
မလိုလားအပ်သော Trip တက်ခြင်းကို ရပ်တန့်ရန်အတွက် Trip class မြင့်မားသော အမျိုးအစားကို ရွေးချယ်ခြင်း မပြုပါနှင့်။ အကယ်၍ မော်တာသည် Trip class မြင့်မားမှုမရှိဘဲ စတင်၍မရပါက စတင်သည့်နည်းလမ်း၊ ဝန်၏ Inertia၊ ဗို့အားကျဆင်းမှု၊ စက်မှုဝန်နှင့် မော်တာ၏ သင့်လျော်မှုတို့ကို စစ်ဆေးပါ။.
ပိုမိုနက်ရှိုင်းသော လမ်းညွှန်ချက်အတွက်၊ ဤနေရာတွင် ကြည့်ရှုပါ Thermal Overload Relay ရွေးချယ်မှု လမ်းညွှန် နှင့် NEMA Class 20 နှင့် IEC Class 10 Overload Relay လမ်းညွှန်.
အဆင့် ၅ - Overload Relay နှင့် MPCB အကြား ရွေးချယ်ခြင်း
တစ်ခု MPCB, သို့မဟုတ် မော်တာကာကွယ်ရေး ဆားကစ်ဘရိတ်ကာ (MPCB) သည် ထုတ်ကုန်ဒီဇိုင်းနှင့် သတ်မှတ်ချက်များအပေါ် မူတည်၍ မော်တာ၏ Overload ကာကွယ်မှုနှင့် Short-circuit ကာကွယ်မှုတို့ကို ကိရိယာတစ်ခုတည်းတွင် ပေါင်းစပ်ထားသည်။ ၎င်းကို ကျစ်လစ်သော မော်တာစတားတာ ပန်နယ်များတွင် မကြာခဏ အသုံးပြုသည်။.
| ရွေးချယ်စရာ | အကောင်းဆုံးအံဝင်ခွင်ကျ | သတိပြုရန်အချက် |
|---|---|---|
| Contactor + Overload Relay + Fuse/MCB/MCCB | ရိုးရာမော်တာစတားတာ၊ လိုက်လျောညီထွေရှိသော ပေါင်းစပ်မှု | သီးခြားရှော့ဖြစ်ခြင်းမှ ကာကွယ်ပေးသည့်ကိရိယာ လိုအပ်သည် |
| MPCB + ကွန်တက်တာ (Contactor) | ကျစ်လစ်သော မော်တာဖိဒ်ဒါများ၊ စက်ပစ္စည်းထိန်းချုပ်ဘုတ်များ၊ မော်ဂျူလာစတားတာများ | MPCB သည် မော်တာ၏ လျှပ်စီးကြောင်းပမာဏနှင့် Fault level တို့နှင့် ကိုက်ညီရမည် |
| MCCB + Contactor + Overload relay | ပိုမိုကြီးမားသော မော်တာများ၊ Fault level မြင့်မားသော ဖိဒ်ဒါများ | MCCB ဆက်တင်များသည် စတင်ချိန် လျှပ်စီးကြောင်းနှင့် Overload relay တို့နှင့် ကိုက်ညီမှုရှိရမည် |
| Fuse + Contactor + Overload relay | Fault-current ကန့်သတ်နိုင်မှု မြင့်မားပြီး ခိုင်မာသော ညှိနှိုင်းဆောင်ရွက်မှုရှိခြင်း | မှန်ကန်သော ဖျူးအမျိုးအစားနှင့် အစားထိုးလဲလှယ်ခြင်းဆိုင်ရာ စည်းကမ်းချက်များ လိုအပ်ပါသည်။ |
အကယ်၍ သင်သည် overload relay နှင့် MPCB အကြား ရွေးချယ်နေပါက၊ ကြည့်ရှုပါ။ Thermal Overload Relay နှင့် MPCB နှိုင်းယှဉ်ချက်.
အဆင့် ၆- ဝါယာရှော့ကာကွယ်ရေးကိရိယာ (Short-Circuit Protective Device) ကို ရွေးချယ်ပါ။
ဝါယာရှော့ကာကွယ်ခြင်းသည် overload ကာကွယ်ခြင်းနှင့် မတူညီပါ။.
ဝါယာရှော့ကာကွယ်ရေးကိရိယာသည် အောက်ပါတို့ ဖြစ်နိုင်သည်-
- တက္ကို
- MCCB
- MPCB
- ဖျူး
- ဖျူးပါဝင်သော switch disconnector
၎င်းကို အောက်ပါအချက်များအပေါ် အခြေခံ၍ ရွေးချယ်ရမည်-
- supply voltage
- တပ်ဆင်မည့်နေရာရှိ မျှော်မှန်းတိုတောင်းသော လျှပ်စီးကြောင်း (prospective short-circuit current)
- ကြိုးအရွယ်အစားနှင့် တပ်ဆင်ပုံစံ
- motor starting current
- Trip curve သို့မဟုတ် Trip settings
- Contactor နှင့် Overload relay တို့နှင့် ညှိနှိုင်းဆောင်ရွက်မှု
- သက်ဆိုင်ရာ စံနှုန်းများနှင့် ဒေသဆိုင်ရာ စည်းမျဉ်းများ
အဓိက စည်းမျဉ်းမှာ -
Breaking capacity သည် မျှော်မှန်းတိုတောင်းသော လျှပ်စီးကြောင်းထက် ကြီးရမည် သို့မဟုတ် ညီရမည်Panel တွင် ဖြစ်ပေါ်နိုင်သော Fault current သည် 10 kA ရှိပါက၊ 6 kA Breaking capacity သာရှိသော Breaker ကို ထိုနေရာတွင် အသုံးပြုရန် မသင့်တော်ပါ။.
MCB/MCCB ရွေးချယ်မှု နယ်ပယ်များအတွက် ကြည့်ရှုရန် MCB Breaking Capacity: 6kA vs 10kA နှင့် Icu၊ Ics၊ Icw နှင့် Icm Circuit Breaker Ratings များ.
အဆင့် ၇ - Instantaneous Trip (ချက်ချင်းဖြတ်တောက်ခြင်း) တန်ဖိုးကို အလွန်နိမ့်အောင် မထားပါနှင့်။
မော်တာစတင်ချိန်တွင် လိုအပ်သော လျှပ်စီးကြောင်း (Starting current) သည် ပုံမှန်ဝန်အားပြည့် လျှပ်စီးကြောင်း (Full-load current) ထက် အဆပေါင်းများစွာ ပိုများလေ့ရှိသည်။ Direct-on-line စနစ်ဖြင့် စတင်သည့်အခါ အကြမ်းဖျင်း ခန့်မှန်းချက်မှာ -
Istart ≈ 5 to 8 x motor FLCတိကျသော စတင်လျှပ်စီးကြောင်းသည် မော်တာဒီဇိုင်း၊ ပေးသွင်းသည့် ဗို့အား၊ ဝန်အား၏ Inertia နှင့် စတင်သည့်နည်းလမ်းတို့အပေါ် မူတည်ပါသည်။.
ထို့ကြောင့် မော်တာဆားကစ်များအတွက် Instantaneous trip ကို Full-load current ၏ အဆနည်းသော တန်ဖိုးတစ်ခုတွင် သတ်မှတ်ထားခြင်းသည် အန္တရာယ်ရှိနိုင်သည်။ ၎င်းသည် မော်တာစတင်ချိန်တွင် ချက်ချင်း Trip ဖြစ်သွားစေနိုင်သည်။.
မှန်ကန်သောနည်းလမ်းမှာ -
- မော်တာ၏ စတင်လျှပ်စီးကြောင်းနှင့် စတင်ချိန်ကြာမြင့်မှုကို အရင်ဆုံး သတ်မှတ်ပါ။.
- ပုံမှန်စတင်နိုင်စေမည့် Breaker သို့မဟုတ် Fuse ကို ရွေးချယ်ပါ။.
- ၎င်းသည် ဝါယာရှော့ဖြစ်ခြင်းကို ဘေးကင်းစွာ ဖြတ်တောက်နိုင်ဆဲဖြစ်ကြောင်း အတည်ပြုပါ။.
- ၎င်းအား overload relay နှင့် contactor တို့နှင့် ကိုက်ညီမှုရှိစေရန် ချိန်ညှိပါ။.
- ရရှိနိုင်ပါက ထုတ်လုပ်သူ၏ trip curves နှင့် coordination tables များကို အသုံးပြုပါ။.
မော်တာဆားကစ်ငယ်များအတွက် ဒီဇိုင်းအချို့တွင် C-curve သို့မဟုတ် D-curve MCB များကို တွေ့ရနိုင်သော်လည်း နောက်ဆုံးရွေးချယ်မှုသည် inrush current၊ ကေဘယ်ကြိုးကာကွယ်မှု၊ fault level နှင့် ဒေသဆိုင်ရာ စံနှုန်းများအပေါ် အခြေခံရမည်ဖြစ်သည်။ မော်တာကြီးများအတွက်မူ သာမန် final-circuit MCB များထက် MCCB၊ MPCB သို့မဟုတ် ဖျူးစ် (fuses) များ ပိုမိုလိုအပ်လေ့ရှိသည်။.
အဆင့် ၈ - စက်ပစ္စည်းများအကြား ကိုက်ညီမှုရှိမရှိ စစ်ဆေးခြင်း
မော်တာစတားတာ (motor starter) ကိုက်ညီမှုဆိုသည်မှာ ဝါယာရှော့ဖြစ်သည့် အခြေအနေများတွင် short-circuit protective device၊ contactor နှင့် overload relay တို့သည် ဘေးကင်းစွာ အတူတကွ အလုပ်လုပ်ခြင်းကို ဆိုလိုသည်။.
ကိုက်ညီမှုဆိုင်ရာ မေးခွန်းများတွင် အောက်ပါတို့ ပါဝင်သည် -
- ဘရိတ်ကာ သို့မဟုတ် ဖျူးစ်သည် အန္တရာယ်ရှိသော ပျက်စီးမှုများ မဖြစ်ပေါ်မီ ဝါယာရှော့ကို ဖြတ်တောက်ပေးနိုင်ပါသလား။
- Contactor သည် let-through current နှင့် energy ကို ခံနိုင်ရည်ရှိပါသလား။
- Overload relay သည် မော်တာအား မလိုအပ်ဘဲ trip မဖြစ်စေဘဲ ကာကွယ်ပေးနိုင်ပါမည်လား။
- ရွေးချယ်ထားသော ပေါင်းစပ်မှုသည် ထုတ်လုပ်သူ၏ စမ်းသပ်ထားသော coordination table နှင့် ကိုက်ညီပါသလား။
- Panel သည် ရရှိနိုင်သော fault current အတွက် ဒီဇိုင်းထုတ်ထားပါသလား။
IEC မော်တာစတားတာများတွင် coordination ကို coordination အမျိုးအစားများဖြင့် မကြာခဏ ဆွေးနွေးလေ့ရှိသည်။ တိကျသော စက်ပစ္စည်းပေါင်းစပ်မှုအတွက် ထုတ်လုပ်သူ၏ အချက်အလက်များဖြင့် အထောက်အထားမရှိပါက coordination အမျိုးအစားတစ်ခုခုကို အတည်မပြုပါနှင့်။.
ပိုမိုကျယ်ပြန့်သော မော်တာစတားတာ တည်ဆောက်ပုံအတွက် အောက်ပါတို့ကို ကြည့်ရှုပါ။ မော်တာစတင်စက် အမျိုးအစားများ ရွေးချယ်မှု လမ်းညွှန်.
အဆင့် ၉ - 7.5 kW မော်တာအတွက် ရွေးချယ်မှု နမူနာ
ယူဆချက် -
- မော်တာပါဝါ - 7.5 kW
- ဗို့အား - 400 V သုံးဖက်မြင် (three-phase)
- ခန့်မှန်းခြေ FLC - 14-16 A ခန့် (မော်တာ၏ nameplate တွင် အတည်ပြုရန်)
- အသုံးပြုပုံ - ပုံမှန်စုပ်စက် (standard pump)
- စတင်မောင်းနှင်သည့်နည်းလမ်း - တိုက်ရိုက်မောင်းနှင်ခြင်း (direct-on-line)
- လုပ်ဆောင်ချက် - ပုံမှန်စတင်ခြင်း/ရပ်တန့်ခြင်း (jogging မဟုတ်ပါ)
Contactor
400 V တွင် မော်တာပါဝါ/လျှပ်စီးကြောင်းနှင့် ကိုက်ညီသော AC-3 မော်တာအဆင့်သတ်မှတ်ချက်ရှိသည့် contactor ကို ရွေးချယ်ပါ။ AC-1 အဆင့်သတ်မှတ်ချက်ကို အခြေခံ၍ ရွေးချယ်ခြင်း မပြုပါနှင့်။.
ဝန်ပိုရီလေး
မော်တာ၏ nameplate တွင်ဖော်ပြထားသော လက်တွေ့လျှပ်စီးကြောင်းပမာဏ ပါဝင်သည့် ချိန်ညှိနိုင်သော overload relay ကို ရွေးချယ်ပါ။ မော်တာ၏ nameplate နှင့် သက်ဆိုင်ရာ စည်းမျဉ်းများအတိုင်း သတ်မှတ်ပါ။ စုပ်စက်၏ စတင်ချိန်သည် ပုံမှန်ဖြစ်ပါက standard trip class သည် သင့်လျော်နိုင်ပါသည်။ လက်တွေ့စတင်ချိန်နှင့် ကိုက်ညီမှုရှိမရှိ စစ်ဆေးပါ။.
ဝါယာရှော့ကာကွယ်ရေး
MCB, MCCB, MPCB သို့မဟုတ် ဖျူးစ် (fuse) တစ်ခုကို ရွေးချယ်ရာတွင် အောက်ပါအချက်များအပေါ် အခြေခံရမည် -
- ရရှိနိုင်သော ရှော့ဆားကစ်လျှပ်စီးကြောင်း
- ကေဘယ်ကြိုး၏ အရွယ်အစား
- စက်စတင်ချိန်တွင် လိုအပ်သော လျှပ်စီးကြောင်း (starting current)
- Contactor နှင့် Overload relay တို့နှင့် ညှိနှိုင်းဆောင်ရွက်မှု
- ပန်နယ်စံနှုန်းနှင့် ဒေသတွင်း တပ်ဆင်မှုဆိုင်ရာ စည်းမျဉ်းများ
ဘရိတ်ကာကို မော်တာ၏ လျှပ်စီးကြောင်း (ampere) တန်ဖိုးနှင့် တူညီရုံသက်သက်ဖြင့် မရွေးချယ်ပါနှင့်။ ဘရိတ်ကာသည် မော်တာစတင်လည်ပတ်မှုကို ခွင့်ပြုပေးရမည့်အပြင် ချို့ယွင်းချက်ဖြစ်ပေါ်သည့် အခြေအနေများတွင်လည်း ကေဘယ်ကြိုးနှင့် ဆားကစ်ကို ကာကွယ်ပေးနိုင်ရမည်။.
ကွိုင်ဗို့အား
အကယ်၍ ထိန်းချုပ်ဆားကစ် (control circuit) သည် 24 VDC ဖြစ်ပါက မော်တာသည် 400 VAC ဖြစ်သော်လည်း 24 VDC ကွန်တက်တာကွိုင်ကိုသာ ရွေးချယ်ပါ။ ကွိုင်ဗို့အားနှင့် မော်တာဗို့အားတို့သည် သီးခြားစီ ရွေးချယ်ရမည့်အချက်များ ဖြစ်သည်။.
အမြန်ရွေးချယ်မှုဆိုင်ရာ စစ်ဆေးစာရင်း
| အဆင့် | ဘာကိုစစ်ဆေးရမလဲ | အဘယ်ကြောင့် အရေးကြီးသနည်း |
|---|---|---|
| 1 | မော်တာနာမည်ပြားတွင် ဖော်ပြထားသော အပြည့်အဝဝန်အား လျှပ်စီးကြောင်း (full-load current) | kW ခန့်မှန်းချက်ထက် ပိုမိုတိကျသည် |
| 2 | ထောက်ပံ့ပေးသော ဗို့အားနှင့် ကြိမ်နှုန်း | လျှပ်စီးကြောင်းနှင့် ထုတ်ကုန်၏ သတ်မှတ်ချက်အပေါ် သက်ရောက်မှုရှိသည် |
| 3 | စတင်အသုံးပြုသည့်နည်းလမ်း | DOL၊ star-delta၊ soft starter၊ VFD |
| 4 | Contactor အမျိုးအစား | ပုံမှန်မော်တာလုပ်ငန်းအတွက် AC-3၊ ပြင်းထန်သောလုပ်ငန်းအတွက် AC-4 |
| 5 | Overload relay ၏ အတိုင်းအတာ (Range) | မော်တာ၏ FLC (Full Load Current) ကို လွှမ်းခြုံနိုင်ရမည် |
| 6 | Trip class | စတင်ချိန်နှင့် မော်တာကာကွယ်မှုစနစ်တို့နှင့် ကိုက်ညီရမည် |
| 7 | ဝါယာရှော့ကာကွယ်ရေးကိရိယာ | PSCC (Prospective Short-Circuit Current) နှင့် ကေဘယ်ကြိုးကာကွယ်မှုတို့နှင့် ကိုက်ညီရမည် |
| 8 | ညှိနှိုင်းဆောင်ရွက်ခြင်း | ကိရိယာများသည် စနစ်တစ်ခုအနေဖြင့် ဘေးကင်းစွာ အလုပ်လုပ်နိုင်ရမည် |
| 9 | ကွိုင်ဗို့အား | ထိန်းချုပ်မှုပတ်လမ်း (Control circuit) နှင့် ကိုက်ညီရမည် |
| 10 | အကာအကွယ်ဘူးခွံနှင့် ပတ်ဝန်းကျင်အခြေအနေ | အပူချိန်၊ ဖုန်မှုန့်၊ တုန်ခါမှုနှင့် ပန်နယ်အတွင်း နေရာလွတ်တို့သည် ယုံကြည်စိတ်ချရမှုကို ထိခိုက်စေနိုင်သည် |
ရွေးချယ်မှုအမှားများ
အမှား ၁ - AC-1 လျှပ်စီးကြောင်းကို အခြေခံ၍ Contactor ရွေးချယ်ခြင်း
AC-1 သည် ပုံမှန်မော်တာများအတွက် အသုံးပြုသည့် အမျိုးအစားမဟုတ်ပါ။ Squirrel-cage မော်တာအများစုအတွက် AC-3 ကို စစ်ဆေးပါ။ လည်ပတ်မှုပြောင်းခြင်း (Reversing)၊ အနည်းငယ်ရွေ့လျားခြင်း (Inching) သို့မဟုတ် ရုတ်တရက်ရပ်တန့်ခြင်း (Plugging) များအတွက် AC-4 သို့မဟုတ် ထုတ်လုပ်သူ၏ လမ်းညွှန်ချက်ကို စစ်ဆေးပါ။.
အမှား ၂ - Nameplate ပေါ်ရှိ လျှပ်စီးကြောင်းကို မစစ်ဆေးဘဲ မော်တာ၏ kW ကိုသာ အသုံးပြုခြင်း
kW သည် ခန့်မှန်းတွက်ချက်ရန်အတွက် အသုံးဝင်သည်။ သို့သော် Overload relay သတ်မှတ်ခြင်းနှင့် နောက်ဆုံးရွေးချယ်ခြင်းအတွက် Nameplate ပေါ်ရှိ လျှပ်စီးကြောင်း (Current) သည် ပိုမိုတိကျသော အခြေခံဖြစ်သည်။.
အမှား ၃ - Breaker သည် မော်တာကို Overload အားလုံးမှ ကာကွယ်ပေးသည်ဟု ယူဆခြင်း
Breaker သည် Short circuit နှင့် Feeder overload တို့ကို ကာကွယ်ပေးနိုင်သော်လည်း မော်တာ၏ Thermal overload ကာကွယ်မှုအတွက် Overload relay၊ Electronic overload သို့မဟုတ် MPCB လိုအပ်ပါသည်။.
အမှား ၄ - Short-circuit trip ကို အလွန်နိမ့်သော တန်ဖိုးတွင် သတ်မှတ်ခြင်း
မော်တာစတင်ချိန်တွင် လျှပ်စီးကြောင်းသည် ပုံမှန်ဝန်အားထက် အဆပေါင်းများစွာ မြင့်တက်နိုင်သည်။ အကယ်၍ Instantaneous setting သို့မဟုတ် Trip curve သည် အလွန်အာရုံခံလွယ်နေပါက မော်တာစတင်ချိန်တွင် မလိုအပ်ဘဲ Trip ကျသွားနိုင်သည်။.
အမှား (၅) - လုပ်ငန်းလည်ပတ်မှုစက်ဝန်း (Duty cycle) ကို လျစ်လျူရှုခြင်း
တစ်နေ့လျှင် အနည်းငယ်သာ စတင်လည်ပတ်သော ပန့်စက်တစ်ခုနှင့် လွန်ဆွဲစက် (hoist)၊ ကရိန်း၊ လမ်းကြောင်းပြောင်း ကွန်ဗေယာ သို့မဟုတ် အချက်ပေးစက် (inching machine) တို့သည် မတူညီပါ။ လုပ်ငန်းလည်ပတ်မှုပုံစံသည် ကွန်တက်တာ (contactor) ရွေးချယ်မှုအပေါ် သက်ရောက်မှုရှိသည်။.
အမှား (၆) - လျှပ်စစ်အမှားအယွင်းအဆင့် (Fault level) ကို လျစ်လျူရှုခြင်း
သတ်မှတ်ထားသော လျှပ်စီးကြောင်းပမာဏ (Rated current) မှန်ကန်သော ဘရိတ်ကာတစ်ခုပင်လျှင် ၎င်း၏ ဖြတ်တောက်နိုင်စွမ်း (Breaking capacity) သည် ဖြစ်နိုင်ခြေရှိသော ရှော့ဆားကစ် (Short-circuit) လျှပ်စီးကြောင်းထက် နည်းနေပါက မသင့်လျော်နိုင်ပါ။.
အမှား (၇) - ထိန်းချုပ်ဗို့အား (Control voltage) နှင့် ပါဝါဗို့အား (Power voltage) ကို ရောထွေးခြင်း
မော်တာသည် 400 VAC ဖြစ်နိုင်သော်လည်း ကွန်တက်တာကွိုင် (Contactor coil) သည် 24 VDC သို့မဟုတ် 230 VAC ဖြစ်နိုင်သည်။ ထိန်းချုပ်ဆားကစ်ကို အမြဲစစ်ဆေးပါ။.
အမြဲမေးလေ့ရှိသောမေးခွန်းများ
မော်တာ၏ kW ပမာဏကိုသာ ကြည့်၍ ကွန်တက်တာကို ရွေးချယ်နိုင်ပါသလား။
မရပါ။ မော်တာ၏ kW သည် အခြေခံအချက်သာဖြစ်ပြီး နောက်ဆုံးရွေးချယ်မှုတွင် မော်တာ၏ ဝန်အပြည့်သုံးစွဲမှု လျှပ်စီးကြောင်း (Full-load current)၊ ဗို့အား၊ AC-3 သို့မဟုတ် AC-4 ကဲ့သို့သော အသုံးပြုမှုအမျိုးအစား၊ လုပ်ငန်းလည်ပတ်မှုစက်ဝန်း (Duty cycle) နှင့် ထုတ်လုပ်သူ၏ သတ်မှတ်ချက်ဇယားများကို အသုံးပြုရပါမည်။.
AC-3 contactor rating ဆိုသည်မှာ အဘယ်နည်း။
AC-3 ဆိုသည်မှာ squirrel-cage မော်တာများကို စတင်မောင်းနှင်ခြင်းနှင့် မော်တာအရှိန်ရပြီးနောက် ပိတ်ခြင်းအတွက် အသုံးများသော IEC အသုံးချမှုအမျိုးအစားတစ်ခုဖြစ်သည်။ ၎င်းသည် စံမော်တာ contactor အသုံးချမှုအများစုအတွက် အဓိကသတ်မှတ်ချက်ဖြစ်သည်။.
AC-4 contactor rating ဆိုသည်မှာ အဘယ်နည်း။
AC-4 သည် inching (ခဏခဏစက်ရပ်လိုက်စလိုက်လုပ်ခြင်း)၊ plugging (မော်တာကို ပြောင်းပြန်လှည့်၍ ရပ်တန့်ခြင်း) နှင့် reversing (လမ်းကြောင်းပြောင်းခြင်း) ကဲ့သို့သော ပိုမိုပြင်းထန်သည့် မော်တာလုပ်ဆောင်ချက်များကို အကျုံးဝင်သည်။ AC-3 အတွက် သင့်လျော်သော contactor တစ်ခုသည် တူညီသော မော်တာပါဝါအတွက် AC-4 တွင် သင့်လျော်မည်မဟုတ်ပေ။.
ကျွန်ုပ်တွင် circuit breaker ရှိပြီးသားဆိုလျှင် overload relay ထပ်မံလိုအပ်ပါသလား။
များသောအားဖြင့် လိုအပ်ပါသည်။ ယေဘုယျ circuit breaker သည် short-circuit နှင့် feeder ကာကွယ်မှုကို ပေးစွမ်းသော်လည်း မော်တာ overload ကာကွယ်မှုအတွက်မူ မော်တာ၏ လျှပ်စီးကြောင်းအတိုင်း ရွေးချယ်ထားသော overload relay၊ electronic overload relay သို့မဟုတ် MPCB တို့ လိုအပ်ပါသည်။.
MPCB နှင့် overload relay တို့၏ ကွာခြားချက်မှာ အဘယ်နည်း။
Overload relay သည် မော်တာအား ကြာရှည်စွာ overload ဖြစ်ခြင်းမှ ကာကွယ်ပေးသော်လည်း များသောအားဖြင့် သီးခြား short-circuit ကာကွယ်မှု လိုအပ်ပါသည်။ MPCB သည် မှန်ကန်စွာ ရွေးချယ်ပြီး သတ်မှတ်ထားပါက မော်တာ overload နှင့် short-circuit ကာကွယ်မှုတို့ကို ကိရိယာတစ်ခုတည်းဖြင့် ပေးစွမ်းနိုင်ပါသည်။.
Can an MCB protect a motor?
MCB တစ်ခုကို မော်တာဆားကစ်အသေးစားအချို့တွင် အကာအကွယ်ပေးသည့်စနစ်၏ အစိတ်အပိုင်းတစ်ခုအဖြစ် အသုံးပြုနိုင်သော်လည်း ၎င်းသည် မော်တာအတွက် အပြည့်အဝကာကွယ်ပေးနိုင်သည့် ဖြေရှင်းချက်တစ်ခုတော့ မဟုတ်ပါ။ စတင်ချိန်တွင် လိုအပ်သောလျှပ်စီးကြောင်း (Starting current)၊ Trip curve၊ ကြိုးအကာအကွယ်၊ Short-circuit ခံနိုင်ရည်နှင့် Overload ကာကွယ်မှုတို့ကို မဖြစ်မနေ စစ်ဆေးရပါမည်။.
မော်တာအတွက် Breaker အရွယ်အစားကို မည်သို့ရွေးချယ်ရမည်နည်း။
မော်တာ၏ Full-load current၊ ကြိုးအရွယ်အစား၊ Starting current နှင့် ဖြစ်နိုင်ခြေရှိသော Short-circuit current တို့မှ စတင်ပါ။ ထို့နောက် ပုံမှန်စတင်လည်ပတ်နိုင်ပြီး ကြိုးကိုကာကွယ်ပေးနိုင်ကာ လုံလောက်သော Breaking capacity ရှိသည့် Breaker၊ MPCB၊ MCCB သို့မဟုတ် Fuse ကို ရွေးချယ်ပါ။.
ကျွန်ုပ်၏ မော်တာ Breaker သည် စတင်လည်ပတ်ချိန်တွင် အဘယ်ကြောင့် Trip ဖြစ်ရသနည်း။
အဖြစ်များသော အကြောင်းရင်းများမှာ Trip curve ထက်ကျော်လွန်သော Starting current၊ ဗို့အားနည်းခြင်း၊ ဝန်အား (Inertia) များလွန်းခြင်း၊ Breaker အမျိုးအစားမှားယွင်းခြင်း၊ Instantaneous setting မမှန်ခြင်း၊ ဗို့အားကျဆင်းခြင်း၊ စက်ပိုင်းဆိုင်ရာ Overload ဖြစ်ခြင်း သို့မဟုတ် မသင့်လျော်သော စတင်လည်ပတ်သည့်နည်းလမ်းကို အသုံးပြုခြင်းတို့ ဖြစ်သည်။.
မလိုအပ်ဘဲ Trip ဖြစ်ခြင်းကို တားဆီးရန်အတွက် ပိုကြီးသော Breaker ကို အသုံးပြုနိုင်ပါသလား။
ကြိုးအကာအကွယ်၊ မော်တာအကာအကွယ်နှင့် Fault clearing တို့ကို စစ်ဆေးခြင်းမပြုဘဲ မလုပ်ဆောင်သင့်ပါ။ Breaker အရွယ်အစားကို အလွန်အကျွံကြီးမားစွာ ရွေးချယ်ခြင်းသည် ပြဿနာ၏လက္ခဏာကိုသာ ဖုံးကွယ်ထားပြီး ကြိုး သို့မဟုတ် မော်တာကို အကာအကွယ်မဲ့ဖြစ်စေနိုင်သည်။.
မော်တာ Starter တစ်ခုကို ရွေးချယ်ရာတွင် အလုံခြုံဆုံးနည်းလမ်းမှာ အဘယ်နည်း။
ရွေးချယ်ထားသော စက်ပစ္စည်းပေါင်းစပ်မှုအတွက် မော်တာအမည်ပြားပေါ်ရှိ လျှပ်စီးကြောင်း၊ အသုံးပြုမှုပုံစံ၊ စတင်သည့်နည်းလမ်း၊ ဝါယာရှော့ဖြစ်နိုင်ခြေအဆင့်၊ ဝန်ပိုကာကွယ်ရေး (overload relay) ဆက်တင်၊ ကွန်တက်တာ (contactor) အသုံးပြုမှုအမျိုးအစားနှင့် ထုတ်လုပ်သူ၏ ညှိနှိုင်းဆောင်ရွက်မှုဇယားများကို အသုံးပြုပါ။.
အကျဉ်းချုပ်
မော်တာပါဝါသည် အသုံးဝင်သော်လည်း လုံလောက်မှုမရှိပါ။ ယုံကြည်စိတ်ချရသော မော်တာစတားတာ (motor starter) ရွေးချယ်မှုသည် full-load current မှ စတင်ရမည်ဖြစ်ပြီး ထိုမှတစ်ဆင့် ကွန်တက်တာ၏ တာဝန်ယူမှု၊ ဝန်ပိုကာကွယ်မှု၊ ဝါယာရှော့ကာကွယ်မှု၊ ညှိနှိုင်းဆောင်ရွက်မှုနှင့် ထိန်းချုပ်ဗို့အားတို့ကို စစ်ဆေးရမည်ဖြစ်သည်။.
ဗို့အားနိမ့် မော်တာထိန်းချုပ်ခန်း (Low-voltage motor panels) အများစုအတွက် -
- ကွန်တက်တာကို AC-1 လျှပ်စီးကြောင်းဖြင့် မဟုတ်ဘဲ AC-3 သို့မဟုတ် AC-4 မော်တာအသုံးပြုမှုပုံစံဖြင့် ရွေးချယ်ပါ။
- ဝန်ပိုကာကွယ်မှုကို မော်တာအမည်ပြားပေါ်ရှိ လျှပ်စီးကြောင်းအတိုင်း သတ်မှတ်ပါ။
- ဝါယာရှော့ကာကွယ်ရေးကိရိယာကို ချို့ယွင်းမှုအဆင့်၊ ကေဘယ်ကြိုးအရွယ်အစား၊ စတင်သည့်လျှပ်စီးကြောင်းနှင့် ညှိနှိုင်းဆောင်ရွက်မှုတို့အပေါ် အခြေခံ၍ ရွေးချယ်ပါ။
- စက်ပစ္စည်းတစ်ခုချင်းစီကိုသာမက စတားတာပေါင်းစပ်မှုတစ်ခုလုံးကို စစ်ဆေးအတည်ပြုပါ။
VIOX မော်တာထိန်းချုပ်မှု ရွေးချယ်ခြင်းအတွက် အောက်ပါတို့ကို ပြန်လည်သုံးသပ်ပါ သတ္မွတ္အ Contactor, အပူလႊတ္ျလွှင်, နှင့် အထောက်အကူပြုလမ်းညွှန်ချက်များကို အောက်ပါတို့တွင် ကြည့်ရှုပါ contactor နှင့် motor starter နှိုင်းယှဉ်ချက်, Thermal overload relay ရွေးချယ်ခြင်း, Thermal overload relay နှင့် MPCB နှိုင်းယှဉ်ချက်နှင့် contactor vs circuit breaker (contactor နှင့် circuit breaker တို့၏ ကွာခြားချက်).
Sources Used
- လက်ရှိ VIOX စာမျက်နှာ- မော်တာပါဝါအပေါ်မူတည်၍ Contactor နှင့် Circuit Breaker များအား မည်သို့ရွေးချယ်ရမည်နည်း
- Contactor အကြောင်းခြုံငုံသုံးသပ်ချက်နှင့် IEC အသုံးပြုမှုအမျိုးအစားများ
- IEC အသုံးပြုမှုအမျိုးအစားများဆိုင်ရာ ခြုံငုံသုံးသပ်ချက်
- VIOX: Contactor နှင့် Motor Starter နှိုင်းယှဉ်ချက်
- VIOX: Thermal Overload Relay ရွေးချယ်မှုလမ်းညွှန်
