基本原則:モーターのkW定格のみで選定しないこと
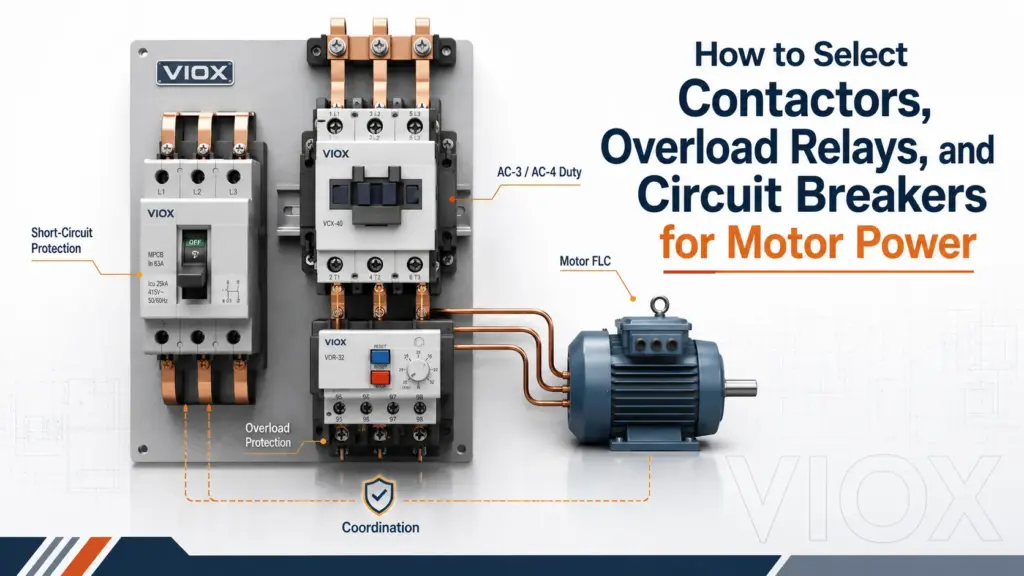
モーター出力はあくまで出発点に過ぎません。コンタクタ、サーマルリレー、および配線用遮断器を正しく選定するには、まずモーター出力を以下の値に換算してください。 モーター全負荷電流(FLC), その後、モーター電圧、始動方式、利用カテゴリー、デューティサイクル、短絡容量、過負荷保護、および機器間の協調を確認してください。.
一般的な低圧モーター盤において:
- について 接触器 モーターのオン・オフを切り替えます。.
- について 過負荷リレー モーターを継続的な過負荷から保護します。.
- について MCB(配線用遮断器)、MCCB(配線用遮断器)、ヒューズ、またはMPCB(モーター保護兼用遮断器) 短絡保護およびフィーダー保護を提供します。.
- A モータースターター これらのデバイスを調整して組み立てたものです。.
最大の誤りは、kW値に単純な係数を掛けてコンタクタとブレーカを直接選定することです。ポンプ、破砕機、正逆転ホイストに使用される7.5kWのモーターであっても、それぞれ異なる開閉責務、過負荷クラス、短絡保護が必要になる場合があります。.
まず基本的なデバイスの比較が必要な場合は、以下を参照してください。 接触器対モータスタータ. 本ガイドでは、実用的な選定に焦点を当てます。.
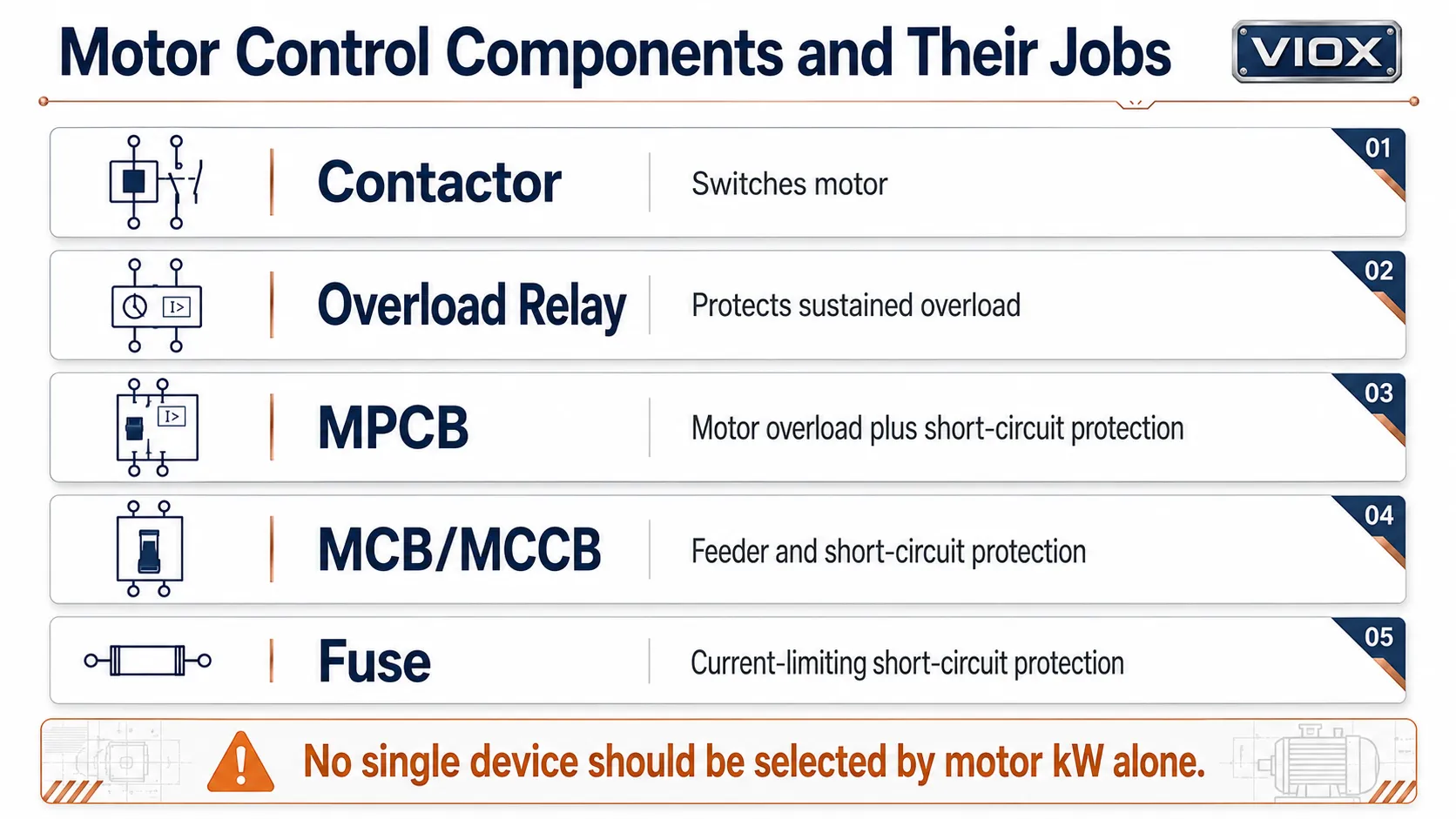
モーター制御コンポーネントとその役割
| 装置 | 主な役割 | 選定基準 | よくある間違い |
|---|---|---|---|
| 接触器 | モーター電源のオン/オフ切り替え | AC-3またはAC-4モーター定格、電圧、デューティサイクル、コイル電圧 | AC-1抵抗負荷電流定格による選定 |
| 熱動式/電子式過負荷継電器(サーマルリレー) | 持続的な過負荷からモーターを保護 | モーター銘板の全負荷電流(FLC)、トリップクラス、リセットモード | ブレーカーが設置されていることによる過負荷保護の省略 |
| MPCB | モーターの過負荷保護と短絡保護を1台の機器で実現 | モーター電流範囲、遮断容量、協調 | 一般的なMCB(配線用遮断器)として扱うこと |
| MCB/MCCB | フィーダーおよび短絡保護 | PSCC(想定短絡電流)、ケーブルサイズ、トリップ曲線/設定、協調 | モーター始動に対して瞬時トリップ設定が低すぎる |
| ヒューズ | 短絡保護、多くの場合高い限流性能を有する | ヒューズクラス、遮断容量、協調 | モーター負荷に対して不適切なヒューズカテゴリーの使用 |
コンタクタは過負荷保護装置ではありません。基本的な過負荷継電器(サーマルリレー)は短絡保護装置ではありません。一般的な配線用遮断器(MCB)は、自動的に電動機保護装置となるわけではありません。これらの境界線は重要です。.
ステップ1:電動機出力を全負荷電流に換算する
三相電動機の場合、線電流の概算式は以下の通りです:
I = P / (sqrt(3) x V x PF x eta)どこでだ:
I= 電動機電流(アンペア)P= 電動機の入力または出力電力(ワット)。入手可能なデータに基づくV= 線間電圧力率= 力率eta(効率)= 効率
電動機の出力(kW)のみが判明している場合は、この式を概算として使用し、その後電動機の銘板と照合してください。最終的な選定には、 銘板に記載された全負荷電流を使用してください。, 計算された電流だけでなく。.
例
7.5 kW、400 Vの三相モーター(力率0.85、効率0.90と推定):
I = 7500 / (1.732 x 400 x 0.85 x 0.90)I ≈ 14.2 Aこの推定値は初期検討用です。実際の銘板電流は異なる場合があります。モーターの設計、効率クラス、周波数、サービスファクタ、周囲環境、およびメーカーの設計が実際の値に影響します。.
より広範な低圧回路の計算式については、以下を参照してください。 低圧盤の設計および保守のための電気計算式.
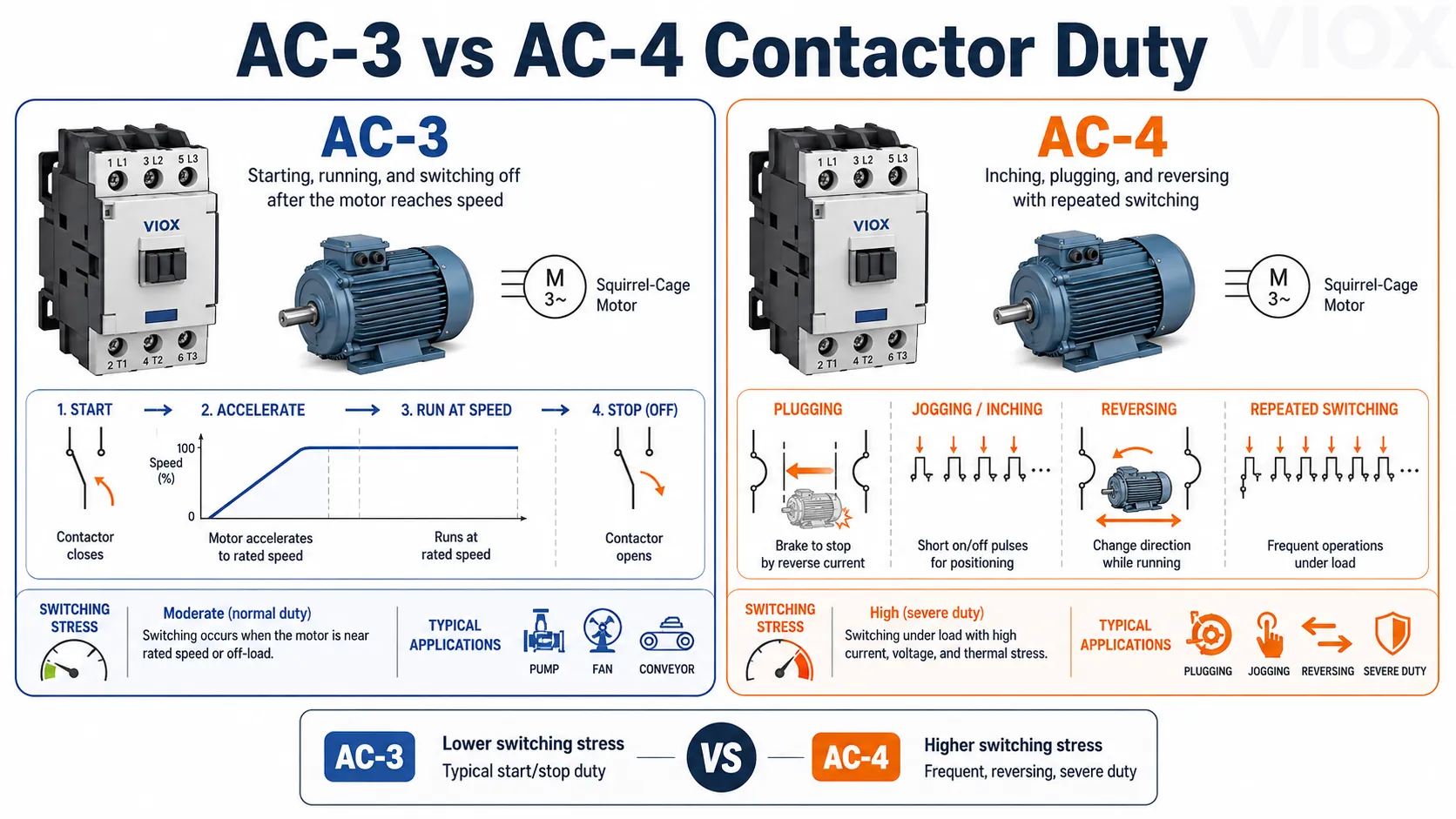
ステップ2:AC-3またはAC-4級に基づいたコンタクタの選定
IEC規格のモーター制御において、コンタクタは一般的なアンペア定格のみで選定されるわけではありません。利用カテゴリが重要となります。.
| 利用カテゴリー | 一般的な負荷 | 選定における意味 |
|---|---|---|
| AC-1 | 非誘導性またはわずかに誘導性の負荷 | 抵抗負荷(通常のモーター始動負荷ではない) |
| AC-3 | かご形モーターの始動および定格回転速度到達後の遮断 | ポンプ、ファン、コンプレッサー、コンベアにおける一般的な負荷 |
| AC-4 | 始動、プラッギング、インチング、逆転 | AC-3よりもはるかに過酷であり、コンタクタのサイズアップが必要となる場合があります。 |
| AC-15 | 交流電磁負荷の制御 | 補助接点/制御接点(主回路のモーター動力接点ではない) |
標準的な直入れ始動(DOL)のモーター開閉には、AC-3定格が主要なコンタクタ定格となります。正逆転、ジョギング、プラッギング、クレーン、ホイスト、または頻繁なインチング動作の場合は、AC-4またはより過酷な使用条件を確認する必要があります。.
デバイスに記載されているAC-1電流値のみを使用してモーター用コンタクタを選定しないでください。AC-1は抵抗負荷または軽微な誘導負荷用です。AC-1定格が高いコンタクタであっても、AC-3やAC-4におけるモーター定格は大幅に低い場合があります。.
VIOX製品の評価については、以下を参照してください。 AC接触器 製品ページを参照してください。.
ステップ3:コンタクタの電圧、極数、およびコイル電圧の確認
モーターの負荷定格を選択した後、以下を確認してください:
- 極数
- 定格使用電圧
- 実際の電圧におけるモーター電流またはkW定格
- AC-3またはAC-4定格
- 開閉責務
- デューティサイクルに対する電気的耐久性
- 機械的耐久性
- 補助接点の必要性
- コイル電圧および制御回路のタイプ
コイル電圧は現場で頻繁に発生するミスです。モーターは400 VACであっても、制御回路は24 VDC、110 VAC、または230 VACである場合があります。コンタクタのコイルは、モーターの動力回路ではなく、制御回路と一致させる必要があります。.
また、アプリケーションのデューティも確認してください:
- 標準的なポンプまたはファンの始動/停止
- 頻繁な開閉操作
- 正転/逆転操作
- スターデルタ始動器
- ソフトスタータのバイパス
- VFD入力またはバイパスコンタクタ
- コンデンサ開閉(該当する場合)
各用途に応じて適切なコンタクタの選定が必要となります。.
ステップ4:過負荷継電器(サーマルリレー)の選定
モーターは、持続的な過負荷、拘束状態、欠相、または機械的負荷の問題により過熱する可能性があるため、過負荷保護が必要です。.
過負荷継電器は通常、以下の項目に基づいて選定されます:
- モーター銘板の全負荷電流
- 過負荷継電器の調整可能電流範囲
- 旅行クラス
- 手動または自動リセットモード
- 必要に応じた欠相保護機能
- コンタクタとの適合性
- 周囲温度補償(該当する場合)
過負荷設定は、通常、モーターの銘板電流および適用される現地の規則またはメーカーのガイダンスに基づいて行う必要があります。.
トリップクラスの重要性
トリップクラスは、規定の過負荷条件下で過負荷継電器がどれだけ早くトリップするかを示します。モーター制御の分野では、クラス10、クラス20、クラス30が一般的です。.
| トリップクラス | 一般的な用途 |
|---|---|
| クラス10 | 通常の始動時間を持つ標準モーター |
| クラス20 | 加速時間が長い負荷 |
| クラス30 | より長い加速時間を必要とする重負荷始動 |
迷惑トリップを回避するためだけに高いトリップクラスを選択しないでください。高いトリップクラスでなければモーターが始動できない場合は、始動方式、負荷慣性、電圧降下、機械的負荷、およびモーターの適合性を確認してください。.
詳細なガイドについては、以下を参照してください。 熱動過負荷継電器選定ガイド そして NEMAクラス20とIECクラス10の過負荷継電器(サーマルリレー)のガイド.
ステップ5:過負荷継電器とMPCBのどちらかを選択する
アン MPCB, 、またはモーター保護兼用遮断器(MPCB)は、製品の設計や定格に応じて、モーターの過負荷保護と短絡保護を1つのデバイスに統合したものです。これは、小型のモータースターター盤でよく使用されます。.
| オプション | 最適な適合 | 注意点 |
|---|---|---|
| 電磁接触器(コンタクタ)+過負荷継電器+ヒューズ/MCB/MCCB | 従来のモータースターター、柔軟な協調保護 | 別途短絡保護装置が必要 |
| MPCB+電磁接触器 | 小型モーターフィーダー、機械パネル、モジュール式スターター | MPCBはモーターの電流範囲および故障レベルに適合させる必要がある |
| MCCB + 電磁接触器 + 過負荷継電器(サーマルリレー) | 大型モーター、より高い故障レベルを持つフィーダー | MCCBの設定は始動電流および過負荷継電器と協調させる必要がある |
| ヒューズ + 電磁接触器 + 過負荷継電器(サーマルリレー) | 高い短絡電流制限能力と強力な協調性 | 正しいヒューズクラスと交換手順の遵守が必要 |
過負荷継電器(サーマルリレー)とMPCBのどちらかを選択する場合は、以下を参照のこと 熱動式過負荷継電器とMPCBの比較.
ステップ6:短絡保護装置の選定
短絡保護は過負荷保護とは異なる.
短絡保護装置は以下のいずれかとする:
- MCB
- MCCB
- MPCB
- ヒューズ
- ヒューズ付きスイッチ断路器
選定は以下に基づいて行うこと:
- 電源電圧
- 設置点における想定短絡電流
- ケーブルサイズおよび敷設方法
- 電動機始動電流
- トリップ曲線またはトリップ設定
- 電磁接触器および過負荷継電器との協調
- 適用規格および地域規定
基本的なルールは以下の通りです。
遮断容量 >= 想定短絡電流配電盤における利用可能な故障電流が10 kAの場合、遮断容量が6 kAの遮断器はその箇所には適していません。.
MCB/MCCBの選定境界については、以下を参照してください。 MCBの遮断容量:6kA対10kA そして Icu対Ics対Icw対Icm 回路遮断器の定格.
ステップ7:瞬時トリップ値を低く設定しすぎないこと
モーターの始動電流は、一般的に全負荷電流の数倍に達します。直入れ始動(DOL)の場合、現場での概算は以下の通りです:
Istart ≈ モーター全負荷電流(FLC)の5〜8倍正確な始動電流は、モーターの設計、供給電圧、負荷慣性、および始動方法によって異なります。.
このため、モーター回路において瞬時トリップ値を全負荷電流の低い固定倍率に設定することは危険です。始動時に即座にトリップを引き起こす可能性があります。.
正しいアプローチは以下の通りです:
- モーターの始動電流と始動時間を特定する。.
- 通常の始動を許容できる遮断器またはヒューズを選定する。.
- 短絡を安全に遮断できることを確認してください。.
- 過負荷継電器(サーマルリレー)および電磁接触器(コンタクタ)と協調させてください。.
- 可能であれば、メーカーのトリップ曲線および協調表を使用してください。.
小規模なモーター回路では、設計によってCカーブまたはDカーブの配線用遮断器(MCB)が採用されることがありますが、最終的な選定は突入電流、ケーブル保護、故障電流レベル、および現地の規格に基づいて行う必要があります。大型のモーターでは、一般的な最終回路用MCBではなく、配線用遮断器(MCCB)、モーター保護遮断器(MPCB)、またはヒューズが必要となることが一般的です。.
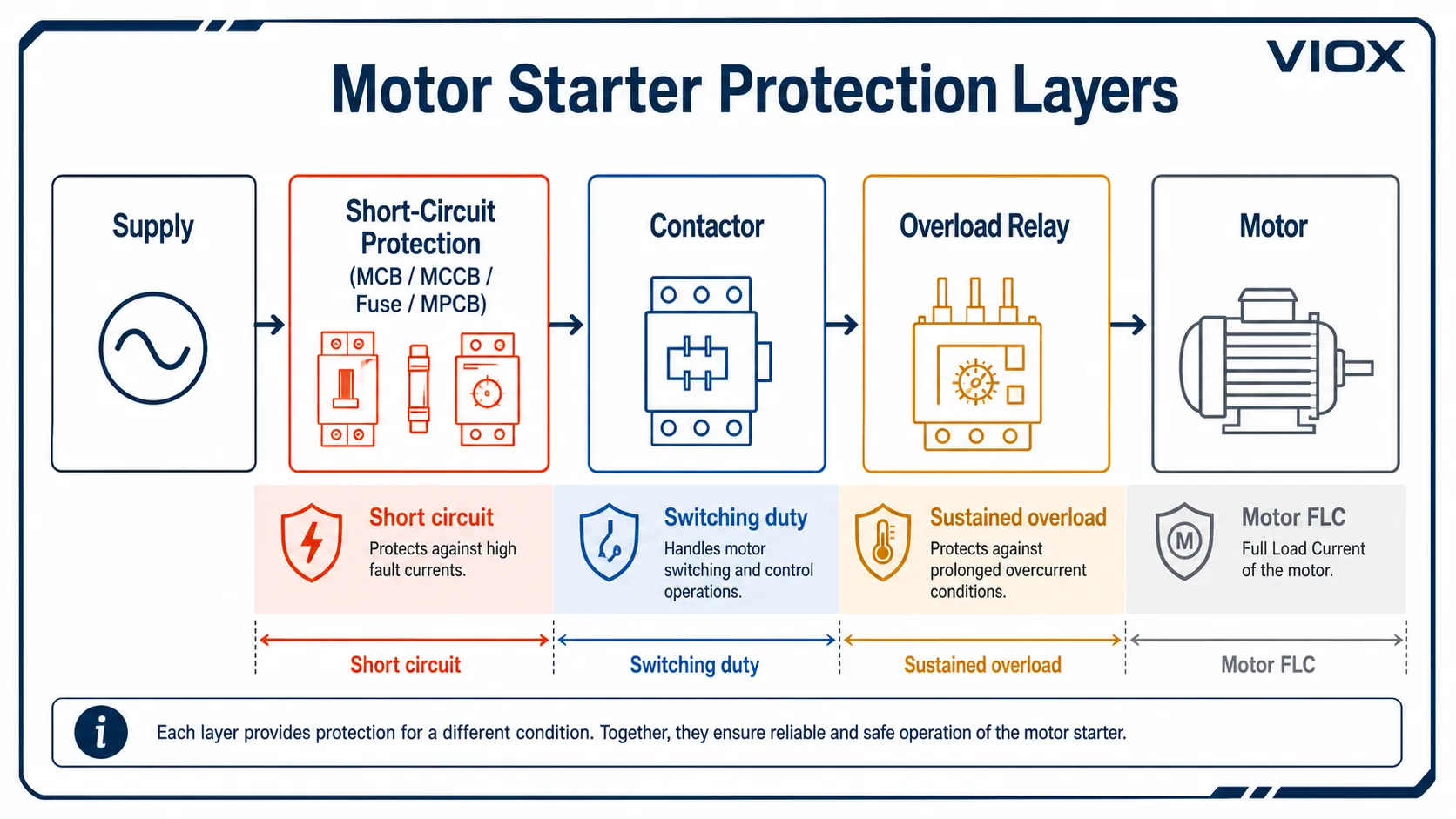
ステップ8:機器間の協調を確認する
モーター始動器の協調とは、短絡保護装置、電磁接触器、および過負荷継電器が、故障発生時に安全に連携して動作することを意味します。.
協調に関する検討事項は以下の通りです:
- 遮断器またはヒューズは、危険な損傷が発生する前に短絡を遮断できるか?
- コンタクタは通過電流および通過エネルギーに耐えられますか?
- 過負荷継電器(サーマルリレー)は、誤動作することなくモーターを保護できますか?
- 選択した組み合わせは、メーカーが試験済みの協調表と一致していますか?
- 配電盤は、想定される短絡電流に対して設計されていますか?
IEC規格のモータースターターにおいて、協調性は協調タイプを用いて議論されることが一般的です。特定の機器の組み合わせについてメーカーのデータで裏付けられていない限り、協調タイプを主張しないでください。.
より広範なモータースターターのアーキテクチャについては、以下を参照してください。 モーター始動器の種類選択ガイド.
ステップ9:7.5 kWモーターの選定例
前提条件:
- モーター出力: 7.5 kW
- 電圧: 400 V 三相
- 推定全負荷電流(FLC): 約14-16 A(銘板にて要確認)
- 用途: 標準ポンプ
- 始動方式: 直入れ始動(DOL)
- 運転条件: 通常の始動/停止(ジョギング運転なし)
接触器
400 Vにおけるモーター出力/電流に適したAC-3級の電磁接触器を選定すること。AC-1級を基準に選定してはならない。.
過負荷リレー
モーター銘板の定格電流が調整範囲に含まれるサーマルリレーを選定すること。モーター銘板の電流値および適用規格に従って設定を行うこと。ポンプの始動時間が標準的な範囲内であれば標準トリップクラスで適合する可能性があるが、実際の始動時間を確認すること。.
短絡保護
MCB、MCCB、MPCBまたはヒューズを以下の基準で選定してください:
- 利用可能な短絡電流
- ケーブルサイズ
- 始動電流
- 電磁接触器および過負荷継電器との協調
- パネル規格および現地の設置規定
モーター電流と同じアンペア値であるという理由だけでブレーカーを選定しないでください。ブレーカーは、モーターの始動を許容しつつ、故障条件下でケーブルおよび回路を保護できるものでなければなりません。.
コイル電圧
制御回路が24 VDCの場合、モーターが400 VACであっても24 VDCのコンタクタコイルを選択してください。コイル電圧とモーター電圧は個別に選定します。.
クイック選定チェックリスト
| ステップ | 確認事項 | 重要な理由 |
|---|---|---|
| 1 | モーター銘板の全負荷電流 | kWの概算値よりも正確 |
| 2 | 電源電圧および周波数 | 電流および製品定格に影響 |
| 3 | 始動方式 | 直入れ始動(DOL)、スターデルタ始動、ソフトスタータ、インバータ(VFD) |
| 4 | コンタクタのカテゴリ | 通常のモータ負荷にはAC-3、過酷な負荷にはAC-4 |
| 5 | サーマルリレーの整定範囲 | モーターの全負荷電流(FLC)をカバーしなければならない |
| 6 | トリップクラス | 始動時間およびモーター保護に適していなければならない |
| 7 | 短絡保護装置 | 予想短絡電流(PSCC)およびケーブル保護と整合しなければならない |
| 8 | コーディネーション | 機器はシステムとして安全に動作しなければならない |
| 9 | コイル電圧 | 制御回路と整合しなければならない |
| 10 | エンクロージャおよび環境 | 熱、粉塵、振動、および盤内スペースが信頼性に影響を与える |
よくある選択ミス
ミス1:AC-1電流値に基づいてコンタクタを選定すること
AC-1は一般的なモータ開閉カテゴリではありません。ほとんどのかご形誘導電動機の用途ではAC-3を確認してください。正逆転、インチング、またはプラッギングを行う場合は、AC-4またはメーカーのガイダンスを確認してください。.
ミス2:銘板電流を確認せずにモータのkW値を使用すること
kW値は概算には有用ですが、過負荷継電器(サーマルリレー)の設定や最終的な選定には、銘板に記載された電流値を基準にするのが適切です。.
ミス3:ブレーカがモータをあらゆる過負荷から保護すると想定すること
ブレーカは短絡やフィーダの過負荷保護には有効ですが、モータの熱的過負荷保護には、多くの場合、過負荷継電器、電子式過負荷継電器、またはモータ保護用遮断器(MPCB)が必要です。.
ミス4:短絡トリップ設定を低くしすぎること
モータの始動電流は全負荷電流の数倍に達することがあります。瞬時トリップ設定やトリップ特性が過敏すぎると、通常の始動時にモータがトリップする可能性があります。.
ミス5:デューティサイクル(負荷率)の無視
1日に数回起動するポンプと、ホイスト、クレーン、正逆転コンベア、インチング運転を行う機械では条件が異なります。開閉頻度はコンタクタの選定に影響します。.
ミス6:短絡容量(遮断容量)の無視
定格電流が適切なブレーカであっても、その遮断容量が想定短絡電流を下回っている場合は不適切となる可能性があります。.
ミス7:制御電圧と主回路電圧の混同
モータが400 VACであっても、コンタクタのコイルは24 VDCや230 VACである場合があります。必ず制御回路を確認してください。.
よくあるご質問
モータのkW数だけでコンタクタを選定できますか?
いいえ。モータのkW数は選定の目安にはなりますが、最終的な選定にはモータの全負荷電流、電圧、AC-3やAC-4といった利用カテゴリ、デューティサイクル、およびメーカーの定格表を使用する必要があります。.
AC-3コンタクタ定格とは何ですか?
AC-3は、かご形誘導電動機の始動および定格回転速度に達した後の遮断に一般的に使用されるIEC利用カテゴリーです。これは、多くの標準的なモーターコンタクタ用途における主要な定格です。.
AC-4コンタクタ定格とは何ですか?
AC-4は、インチング、プラッギング、逆転などのより過酷なモーター負荷を対象としています。AC-3に適したコンタクタであっても、同じモーター出力でAC-4には適さない場合があります。.
サーキットブレーカーがある場合でも、過負荷継電器(サーマルリレー)は必要ですか?
多くの場合、必要です。一般的なサーキットブレーカーは短絡保護およびフィーダー保護を提供しますが、モーターの過負荷保護には通常、モーター電流に合わせて選定された過負荷継電器、電子式過負荷継電器、またはMPCB(モーター保護用遮断器)が必要です。.
MPCBと過負荷継電器の違いは何ですか?
過負荷継電器は持続的なモーター過負荷から保護しますが、通常は別途短絡保護が必要です。MPCBは、適切に選定および定格設定されていれば、モーターの過負荷保護と短絡保護を1台の機器で提供できます。.
MCBでモーターを保護できますか?
MCBは一部の小型モーター回路において保護スキームの一部として使用されることがありますが、それだけで完全なモーター保護ソリューションになるわけではありません。始動電流、トリップ曲線、ケーブル保護、短絡容量、および過負荷保護をすべて確認する必要があります。.
モーターのブレーカーサイズはどのように選定すればよいですか?
モーターの全負荷電流、ケーブルサイズ、始動電流、および想定短絡電流から検討を開始してください。その上で、正常な始動を許容し、ケーブルを保護し、かつ十分な遮断容量を備えたブレーカー、MPCB、MCCB、またはヒューズを選定します。.
なぜ始動時にモーターブレーカーがトリップするのですか?
一般的な原因として、トリップ曲線を超える始動電流、低電圧、過大な負荷慣性、ブレーカーの種類の誤り、瞬時設定の不適切、電圧降下、機械的過負荷、または不適切な始動方式などが挙げられます。.
誤トリップを防ぐために、より大きなブレーカーを使用してもよいですか?
ケーブル保護、モーター保護、および故障除去の確認なしに行うべきではありません。ブレーカーを過大に選定すると、症状は隠せても、ケーブルやモーターが保護されないままになる恐れがあります。.
モータースターターを選定する最も安全な方法は何ですか?
モーターの銘板電流、アプリケーションの負荷特性、始動方式、短絡容量、過負荷継電器の設定、コンタクタの利用区分、および選択した機器構成のメーカー協調表を使用してください。.
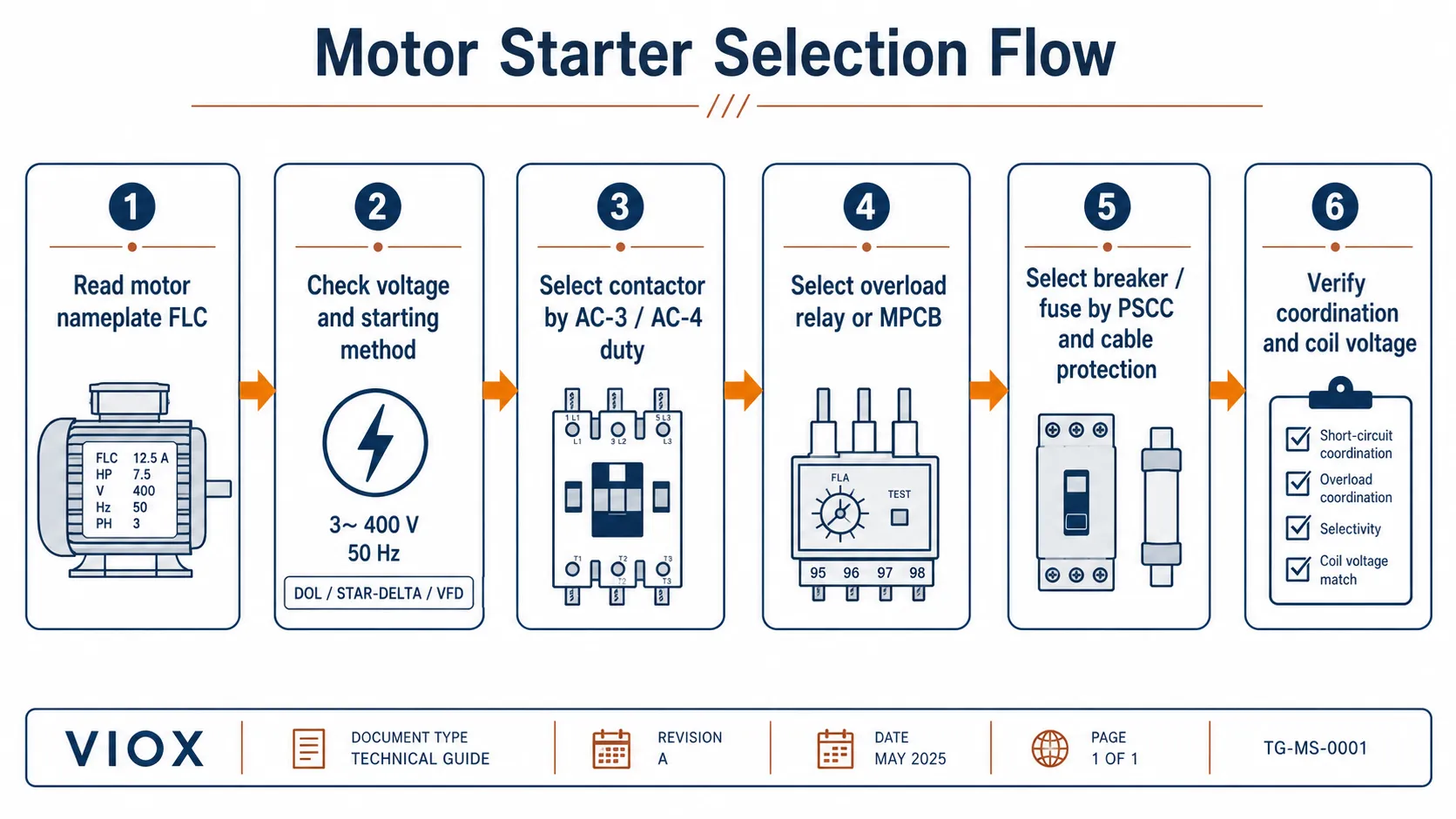
概要
モーター出力は有用ですが、それだけでは不十分です。信頼性の高いモータースターターの選定は、全負荷電流から始まり、次にコンタクタの負荷特性、過負荷保護、短絡保護、協調、および制御電圧を確認します。.
一般的な低圧モーター盤において:
- コンタクタはAC-1電流ではなく、AC-3またはAC-4のモーター負荷特性に基づいて選定してください。
- 過負荷保護はモーターの銘板電流に基づいて設定してください。
- 短絡保護装置は、故障電流レベル、ケーブルサイズ、始動電流、および協調性を考慮して選定してください。
- 個々の機器だけでなく、スターターの組み合わせ全体で検証してください。
VIOXモーター制御の選定については、以下を確認してください。 AC接触器, 熱過負荷にリレー, 、および以下のサポートガイド。 電磁接触器(コンタクタ)とモーター始動器(スターター)の比較, サーマル過負荷継電器(サーマルリレー)の選定, サーマル過負荷継電器とMPCBの比較そして コンタクタと回路遮断器(サーキットブレーカー)の比較.
