
MCCBトリップユニットの設定が重要な理由:電気保護の基礎
現代の配電システムは、過負荷や短絡に対する正確で信頼性の高い保護を必要とします。この保護の中核となるのが、 配線用遮断器(MCCB)は、 トリップユニットです。これは、ブレーカーが故障状態にいつ、どれくらいの速さで応答するかを決定する「頭脳」です。固定トリップの小型回路ブレーカーとは異なり、, MCCB 調整可能なトリップユニットを備えたMCCBは、エンジニアが保護特性を特定のアプリケーションに合わせて調整し、保護デバイス間の連携を最適化し、誤トリップによる不要なダウンタイムを防ぐ柔軟性を提供します。.
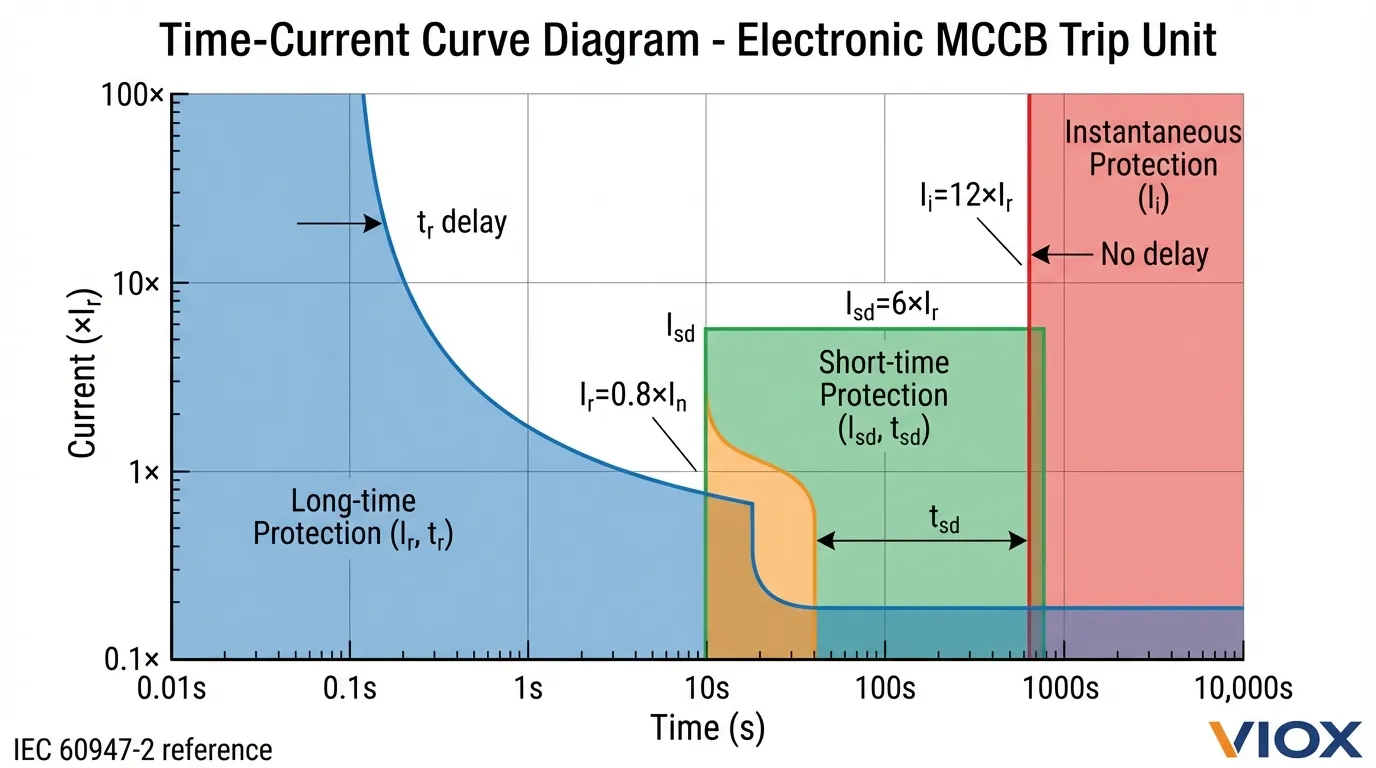
4つの基本的なトリップユニットパラメータの理解—Ir (長時間保護)、, Im (短時間保護)、, Isd (短時間ピックアップ)、および Ii (瞬時保護)—は、電気システムの設計、パネルの構築、または施設のメンテナンスに関わるすべての人にとって不可欠です。不適切な設定は、不十分な保護、連携の失敗、または業務を中断する頻繁な誤トリップにつながる可能性があります。この包括的なガイドでは、各パラメータについて説明し、実用的な計算方法を提供し、VIOXの設定方法を示します。 MCCBトリップユニット 最適なパフォーマンスと安全性のために。.

熱磁気式と電子式トリップユニット:テクノロジーの理解
特定のパラメータに入る前に、2つの主要な 回路ブレーカーのタイプを理解することが重要です。 トリップテクノロジーと、それらが機能と調整可能性においてどのように異なるか。.
表1:熱磁気式と電子式トリップユニットの比較
| 特徴 | 熱磁気式トリップユニット | 電子式トリップユニット |
|---|---|---|
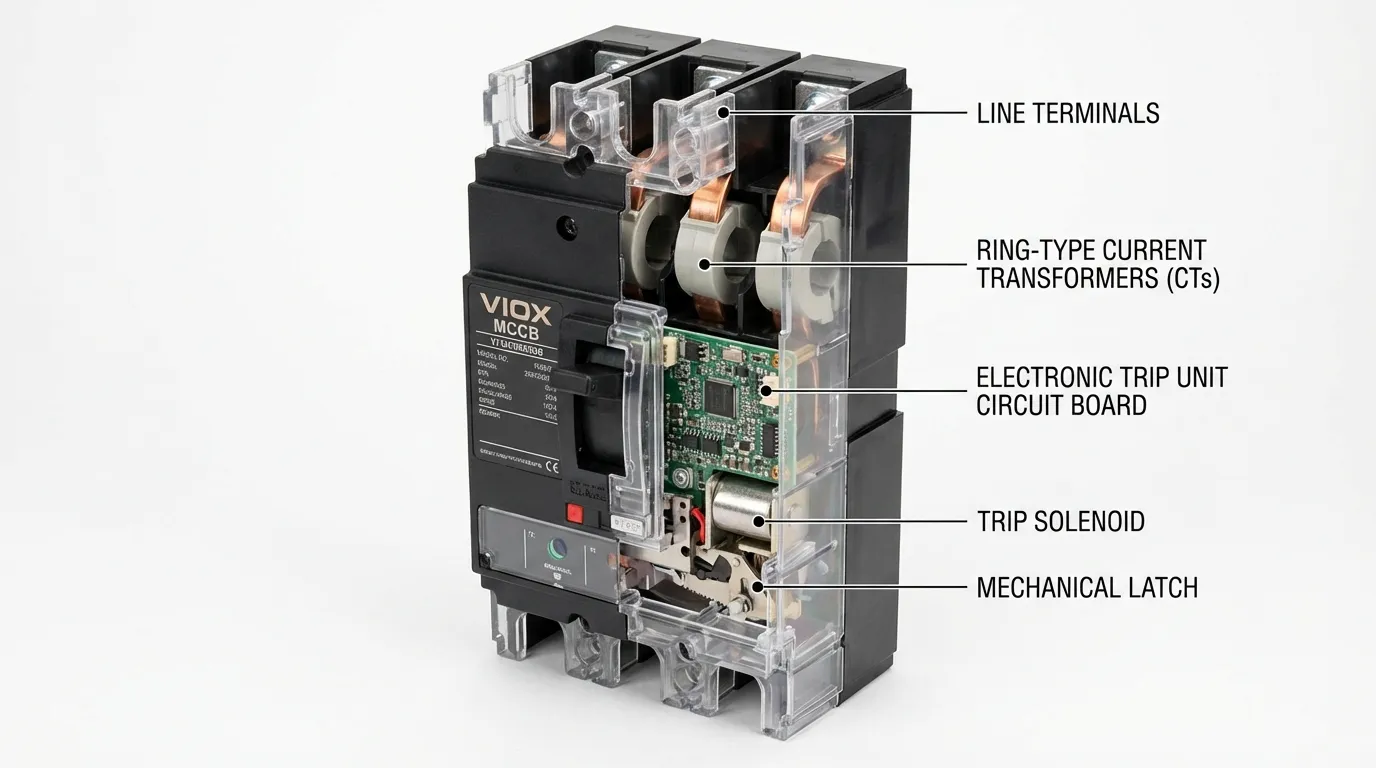
| 動作原理 | バイメタルストリップ(熱)+電磁コイル(磁気) | 変流器(CT)+マイクロプロセッサ |
| Ir調整 | 制限付きまたは固定(通常0.7〜1.0 × In) | 広い範囲(通常0.4〜1.0 × In) |
| Isd調整 | 利用不可(Iiと組み合わせ) | 完全に調整可能(1.5〜10 × Ir) |
| Ii調整 | 固定または制限された範囲(通常5〜10 × In) | 広い範囲(2〜15 × Ir以上) |
| 遅延時間調整 | 固定逆曲線 | 調整可能なtsd(通常0.05〜0.5秒) |
| I²t保護 | 利用不可 | 高度なユニットで利用可能 |
| 精度 | ±20% | ±5〜10% |
| 温度感受性 | 周囲温度の影響を受ける | 電子的に補償 |
| 地絡保護 | 別のモジュールが必要 | 多くの場合統合(Ig設定) |
| ディスプレイ/診断 | なし | LCDディスプレイ、イベントロギング、通信 |
| コスト | より低い | より高い |
| 代表的な用途 | シンプルなフィーダー、固定負荷 | モーター、発電機、複雑な連携 |
重要な考察:電子式トリップユニットは、はるかに優れた柔軟性と精度を提供するため、厳密な連携、モーター保護、またはビル管理システムとの統合を必要とするアプリケーションに不可欠です。VIOXは両方のテクノロジーを提供しており、高度な保護機能を必要とする設置には電子式ユニットを推奨しています。.
4つのコア保護パラメータ:Ir、Im、Isd、およびIiの説明
表2:トリップユニットパラメータのクイックリファレンス
| パラメータ | フルネーム | 保護機能 | 標準範囲 | 時間特性 | 主な目的 |
|---|---|---|---|---|---|
| Ir | 長時間ピックアップ電流 | 熱/過負荷保護 | 0.4〜1.0 × In | 逆時間(tr) | 持続的な過負荷から導体を保護 |
| Im | 短時間保護 | N/A(Isdと組み合わせ) | 該当なし | 該当なし | レガシー用語、Isdを参照 |
| Isd | 短時間ピックアップ電流 | 遅延付き短絡保護 | 1.5〜10 × Ir | 整定時間 (tsd) | 下流側の機器が先に故障を除去できるようにする |
| Ii | 瞬時整定電流 | 即時短絡保護 | 2~15 × Ir (またはそれ以上) | 遅延なし (<0.05秒) | 重大な故障から保護する |
| tr | 長時間遅延 | 過負荷トリップ時間 | 固定逆曲線 | 反限時特性 (I²t) | 電線の熱容量に適合 |
| tsd | 短時間遅延 | 短絡遅延 | 0.05~0.5秒 | 整定時間 | 選択遮断協調を可能にする |
用語に関する注記: 古い文献では「Im」という用語が「Isd」と互換的に使用されることがありますが、最新のIEC 60947-2およびUL 489規格では、主に Isd 短時間整定用、および Ii 瞬時整定用として参照されています。このガイドでは、現在の標準的な用語を使用しています。.
Ir (長時間保護): 連続電流定格の設定
Ir は、トリップユニットの連続電流定格を表します。これは、ブレーカーがトリップせずに無期限に流すことができる最大電流です。これは最も基本的な設定であり、負荷と電線の許容電流に慎重に合わせる必要があります。.
Irの仕組み
長時間保護機能は、バイメタルストリップ (熱磁気式) または電子検知 (電子式トリップユニット) を使用して負荷電流を監視します。電流がIr設定を超えると、反限時特性が開始されます。過負荷が大きいほど、トリップは速くなります。これは、電線および接続された機器の熱的挙動を模倣し、一時的な過負荷 (モーターの始動、変圧器の突入電流) に対応する時間を提供しながら、絶縁を損傷する可能性のある持続的な過負荷から保護します。.
Irの計算
基本式:
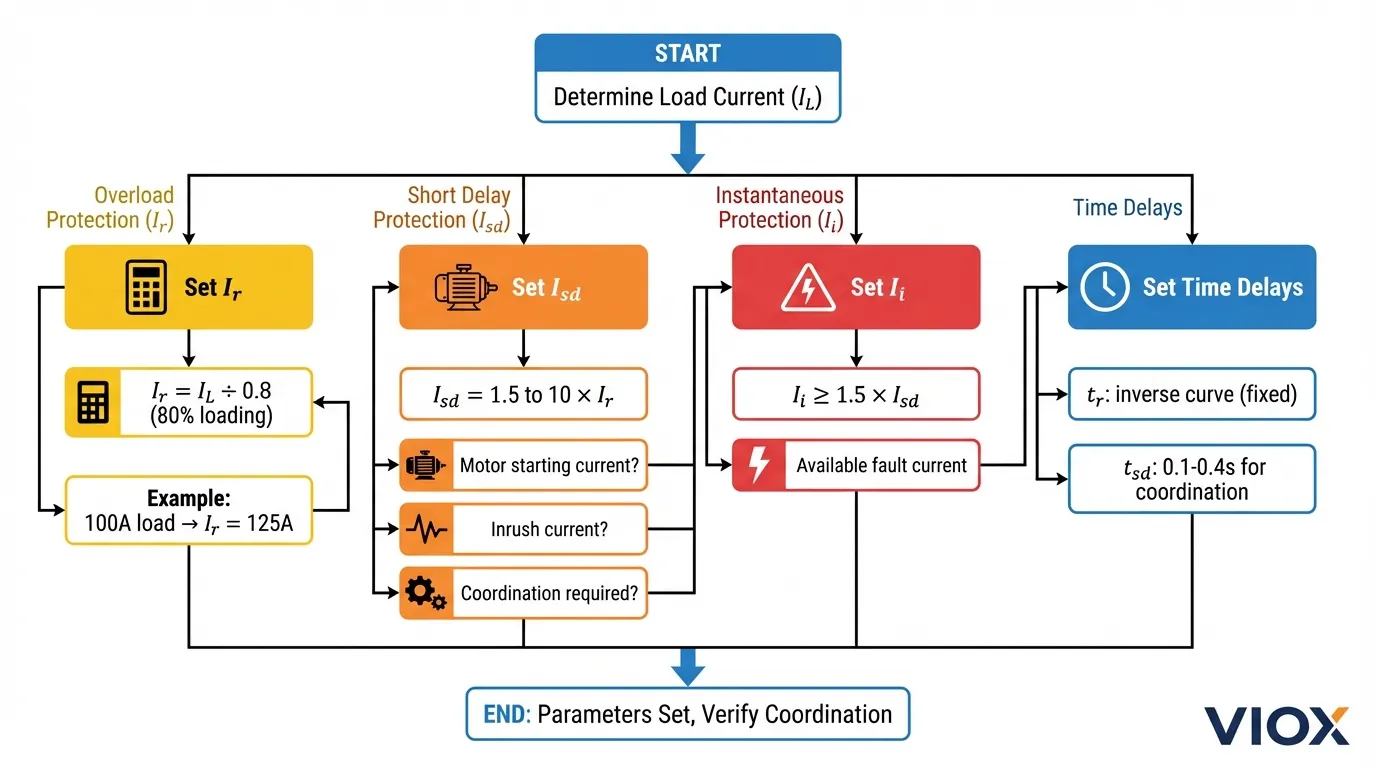
Ir = 負荷電流 (IL) ÷ 負荷率
標準的な方法:
- 連続負荷の場合:
Ir = IL ÷ 0.8(NEC/IECに基づく80%負荷) - 非連続負荷の場合:
Ir = IL ÷ 0.9(90%負荷が許容される)
例
100Aの連続負荷に必要なもの: Ir = 100A ÷ 0.8 = 125A
MCCBのInが160Aの場合、Irダイヤルを以下に設定します。 125A ÷ 160A = 0.78 (最も近い利用可能な設定に丸めます。通常は0.8)
Ir設定の考慮事項
- 電線の許容電流: Irは、回路内の最小の電線の許容電流を超えてはなりません
- 周囲温度: 電子式トリップユニットは自動的に補正します。熱磁気式ユニットでは、 ディレーティングが必要になる場合があります
- モーター負荷: サービスファクターと始動電流の持続時間を考慮してください
- 今後の拡大: 一部のエンジニアは、負荷の増加に対応するためにIrをわずかに高く設定しますが、これは電線の保護を損なうものであってはなりません
Isd (短時間整定): 協調短絡保護
Isd は、短時間保護が作動する電流レベルを定義します。瞬時保護とは異なり、短時間保護には、下流の保護デバイスが最初に故障を除去できるようにするための意図的な遅延 (tsd) が含まれています。これは、 選択遮断協調の本質です.
Isdの仕組み
故障電流がIsdしきい値を超えると、トリップユニットはタイマー (tsd) を開始します。故障がtsd遅延を超えて続く場合、ブレーカーはトリップします。下流のブレーカーがtsdの有効期限が切れる前に故障を除去した場合、上流のブレーカーは閉じたままになり、停電は故障した分岐に限定されます。.
Isdの計算
基本式:
Isd = (1.5~10) × Ir
選考基準:
- 最小設定: 最大予想過渡電流 (モーターの始動、変圧器の突入電流) を超える必要があります
- 最大設定: ブレーカーの場所で使用可能な故障電流を下回る必要があります
- 連携要件: 下流のブレーカーのIi設定よりも高くする必要があります
例
Ir = 400Aの場合:
- 最小Isd:
1. 5 × 400A = 600A(突入電流による不要なトリップを回避) - 標準的なIsd:
6 × 400A = 2,400A(フィーダー保護で一般的) - 最大Isd:遮断器の短絡遮断容量(Icu/Ics)によって制限される 短絡遮断容量(Icu/Ics)
IsdとIi:それぞれの使い分け
- Isd(tsd遅延付き)を使用:下流機器との選択遮断が必要な主遮断器およびフィーダー遮断器
- Ii(遅延なし)を使用:瞬時トリップが許容され、下流との協調が不要な最終分岐回路
- Isdを無効化:一部のアプリケーションでは、Isdを「OFF」に設定し、Iiのみを簡略化のために使用
Ii(瞬時保護):即時の高故障保護
Ii 故障電流が極めて高いレベルに達した場合、瞬時トリップ(通常50ms未満、多くの場合20ms未満)を提供します。これは、アーク、火災、または機器の破壊を引き起こす可能性のある壊滅的な故障に対する最後の防衛線です。.
Iiの仕組み
電流がIi閾値を超えると、トリップユニットは意図的な遅延なしに、遮断器機構にトリップ信号を即座に送信します。この迅速な応答により、アークエネルギーが最小限に抑えられ、ボルト締め短絡などの深刻な故障時の損傷が制限されます。.
Iiの計算
基本式:
Ii ≥ 1.5 × Isd
選考基準:
- 最小設定:重複を避けるために、Isdより少なくとも1.5倍高くする必要があります
- モーターアプリケーション:拘束回転子電流(通常、FLAの8〜12倍)を超える必要があります
- コーディネーション:選択遮断を維持するために、上流遮断器のIsdより低くする必要があります
- 利用可能な故障電流:設置場所での予想短絡電流を下回る必要があります
例
Isd = 2,400Aの場合:
- 最小Ii:
1.5 × 2,400A = 3,600A - 標準的なIi:
12 × Ir = 12 × 400A = 4,800A(一般的な設定)
Iiに関する特別な考慮事項
- 変圧器突入電流:Iiは、励磁突入電流(通常、0.1秒で定格電流の8〜12倍)を超える必要があります
- モーター始動:〜の場合 モーター保護アプリケーション, 、Iiは拘束回転子電流を超える必要があります
- アークフラッシュ低減:(許容される範囲で)Ii設定を低くすると、アークフラッシュ入射エネルギーが減少します
- 迷惑なトリップ:Iiの設定が低すぎると、通常のスイッチング操作中に誤トリップが発生します
時間遅延:trとtsdの説明
tr(長時間遅延)
について tr パラメータは、長時間保護の反限時特性を定義します。ほとんどの電子トリップユニットでは、trは直接調整できませんが、標準化されたI²t曲線に従います。この曲線により、過負荷の大きさが大きくなるにつれてトリップ時間が短縮されます。
- 1.05 × Irの場合:トリップなし(許容範囲)
- 1.2 × Irの場合:2時間未満(電子式)または1時間未満(熱磁式)でトリップ
- 6 × Irの場合:数秒でトリップ(短時間ゾーンへの移行)
重要なポイント:tr曲線は、IEC 60947-2およびUL 489に従って、導体の熱制限に一致するように工場で校正されています。エンジニアは通常、trを直接調整するのではなく、適切なトリップユニットモデルを選択して調整します。.
tsd(短時間遅延)
について tsd パラメータは、短時間保護の整定時間遅延です。一般的な設定は次のとおりです。
- 0.05秒:基本的な協調のための最小遅延
- 0.1s:ほとんどのアプリケーションの標準設定
- 0.2秒:複雑なシステムでの強化された協調
- 0.4秒:深い協調のための最大遅延(高いIcw定格が必要)
協調ルール:選択遮断を確実にするために、上流のtsdは下流遮断器の総遮断時間よりも少なくとも0.1〜0.2秒長くする必要があります。.
I²t保護:強化された協調のための熱メモリ
高度な電子トリップユニットには以下が含まれます I²t保護, これは、繰り返しの過負荷または故障の累積的な加熱効果を考慮します。この「熱メモリ」は、持続的な熱ストレスから保護しながら、短時間の無害な電流スパイクによる不要なトリップを防ぎます。.
I²tを有効にする場合:
- 頻繁に始動するモーター回路
- 繰り返しの突入電流が発生する変圧器回路
- 高い過渡負荷がかかるシステム
- 上流ヒューズとの協調
I²tを無効にする場合:
- 発電機保護(即時応答が必要)
- 遅延が許容されない重要な負荷
- 複雑な協調の必要がない単純な放射状システム
アプリケーション別の実用的な設定例
表 3: アプリケーション別の一般的なトリップユニット設定
| の応用 | 負荷電流 (IL) | Ir 設定 | Isd 設定 | Ii 設定 | tsd 設定 | 注記 |
|---|---|---|---|---|---|---|
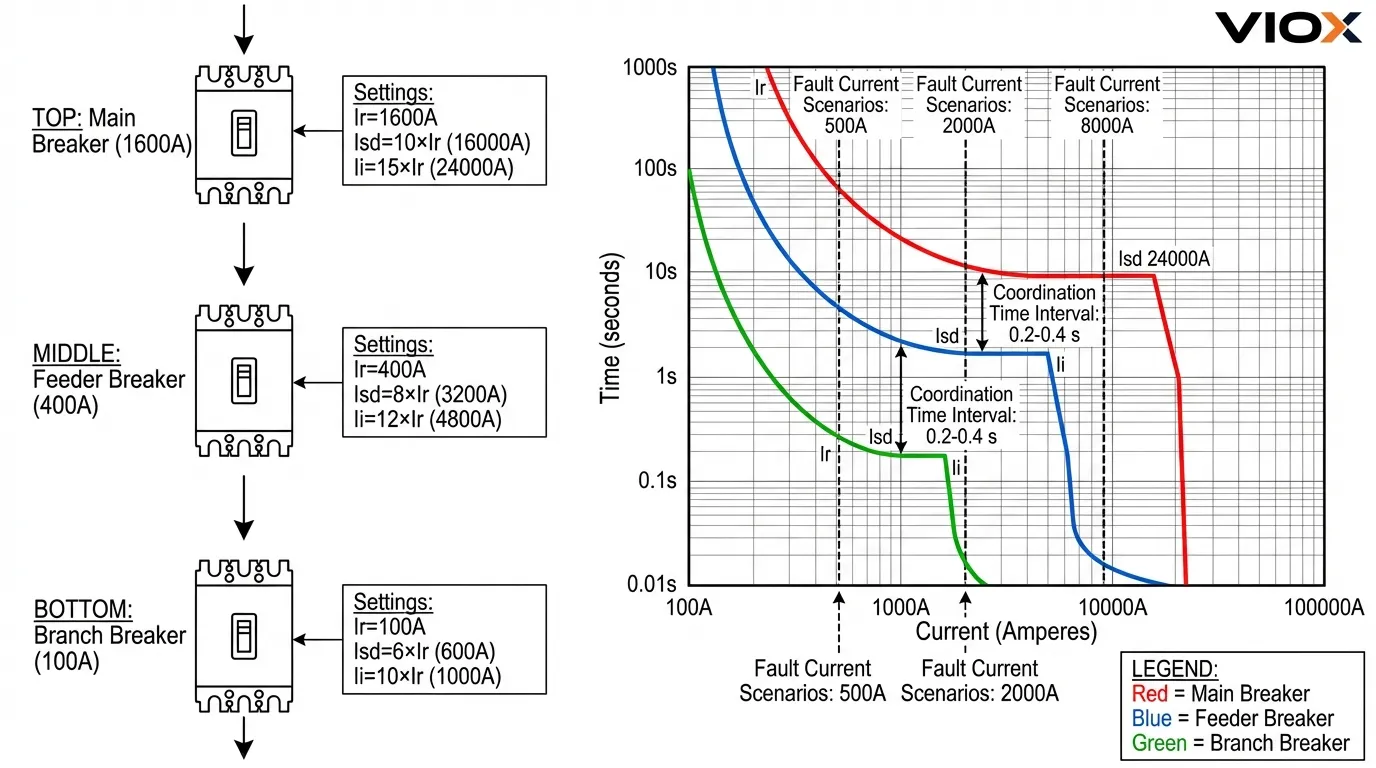
| 主遮断器 (1600A) | 1280A | 1.0 × In = 1600A | 10 × Ir = 16,000A | 15 × Ir = 24,000A | 0.4秒 | フィーダーとの最大の選択性 |
| フィーダー (400A) | 320A | 0.8 × In = 320A | 6 × Ir = 1,920A | 12 × Ir = 3,840A | 0.2秒 | メインおよび分岐との協調 |
| モーター分岐 (100A) | 75A FLA | 0.9 × In = 90A | 8 × Ir = 720A | 12 × Ir = 1,080A | OFF (Ii のみ) | 6× LRA に対応 |
| 照明/コンセント (63A) | 50A | 0.8 × In = 50A | オフ | 10 × Ir = 500A | 該当なし | 単純な保護、協調は不要 |
| 変圧器一次側 (250A) | 200A | 0.8 × In = 200A | 10 × Ir = 2,000A | 12 × Ir = 2,400A | 0.1s | 0.1 秒間、10 倍の突入電流に耐える |
| 発電機 (800A) | 640A | 0.8 × In = 640A | 3 × Ir = 1,920A | 6 × Ir = 3,840A | 0.05秒 | オルタネーターを保護するための高速遮断 |
| UPS 出力 (160A) | 128A | 0.8 × In = 128A | オフ | 8 × Ir = 1,024A | 該当なし | 瞬時のみ、バッテリー損傷なし |
ステップバイステップの設定計算例
表 4: 設定計算例
| ステップ | 例 1: 400A フィーダー | 例 2: 100A モーター分岐 | 例 3: 1600A メイン |
|---|---|---|---|
| 1. 負荷の決定 | 320A 連続負荷 | 75A モーター (FLA)、450A LRA | 1280A 総負荷 |
| 2. Ir の計算 | 320A ÷ 0.8 = 400A Ir = 1.0 × 400A = 400A に設定 |
75A ÷ 0.9 = 83A 100A フレームに切り上げ Ir = 0.9 × 100A = 90A に設定 |
1280A ÷ 0.8 = 1600A Ir = 1.0 × 1600A = 1600Aに設定 |
| 3. Isdを計算 | 100A分岐との協調が必要 Isd = 6 × 400A = 2,400Aに設定 |
モータ始動:450A LRA Isd = 8 × 90A = 720Aに設定 (450A LRAを超える) |
400Aフィーダとの協調 Isd = 10 × 1600A = 16,000Aに設定 |
| 4. Iiを計算 | Isdを1.5倍超える必要がある Ii = 12 × 400A = 4,800Aに設定 (2× Isd、十分なマージン) |
LRAを超える必要がある Ii = 12 × 90A = 1,080Aに設定 (2.4× LRA、適切) |
フィーダIiを超える必要がある Ii = 15 × 1600A = 24,000Aに設定 (5× フィーダIi) |
| 5. 時間遅延を設定 | tsd = 0.2秒 (100A分岐が0.1秒で遮断できるようにする) |
tsd = OFF (簡略化のためIiのみを使用) |
tsd = 0.4秒 (最大限の選択遮断) |
| 6. 協調を確認 | ✓ Isd (2,400A) > 分岐Ii (1,080A) ✓ tsd (0.2秒) > 分岐遮断時間 |
✓ Ii (1,080A) < フィーダIsd (2,400A) ✓ 上流との協調は不要 |
✓ Isd (16,000A) > フィーダIi (4,800A) ✓ tsd (0.4秒) > フィーダtsd + 0.2秒 |
選択遮断と協調:重要な関係
故障時の停電範囲を最小限に抑えるためには、上流と下流の保護デバイス間の適切な協調が不可欠です。目標:故障に最も近い遮断器のみがトリップし、システムの残りの部分は通電されたままにする。.
表5:選択遮断協調ルール
| 連携要件 | ルール | 例 |
|---|---|---|
| 上流Ir vs. 下流Ir | 上流Ir ≥ 2× 下流Ir | 主幹1600A、フィーダ400A (4×比) |
| 上流Isd vs. 下流Ii | 上流Isd > 下流Ii | 主幹Isd 16,000A > フィーダIi 4,800A |
| 上流tsd vs. 下流遮断時間 | 上流tsd ≥ 下流総遮断時間 + 0.1~0.2秒 | 主幹tsd 0.4秒 > フィーダ (0.2秒 + 0.1秒遮断) |
| 上流Ii vs. 下流Ii | 上流Ii ≥ 2× 下流Ii | 主幹Ii 24,000A > フィーダIi 4,800A (5×比) |
| I²t協調 | 上流I²t > 下流I²t | 主幹I²t ON、フィーダI²t ONまたはOFF |
主要な協調原則:各上流デバイスは、保護する下流デバイスよりも高いピックアップ設定と長い時間遅延を持つ必要があります。これにより、最小の遮断器が最初にトリップし、次に大きい遮断器がトリップするという保護の「カスケード」が作成されます。.
高度な協調:複雑なシステムの場合は、時間電流曲線解析ソフトウェア(多くのメーカーが無料ツールを提供)を使用して、すべての故障電流レベルで協調を確認します。VIOXテクニカルサポートが支援できます 回路保護の選択 および協調検討。.
一般的な設定ミスと解決策
表6:一般的な設定ミスと解決策
| 間違い | 結果 | 正しいアプローチ | 予防 |
|---|---|---|---|
| Irの設定が高すぎる | 電線過熱、絶縁損傷 | 遮断器フレームサイズではなく、電線許容電流に基づいてIrを計算する | 常にIr ≤ 電線許容電流を確認する |
| Irの設定が低すぎる | 通常運転中の迷惑トリップ | 連続負荷と安全マージンを考慮する(80%ルール) | 設定前に実際の負荷電流を測定する |
| Isd = Ii (分離なし) | 選択性の喪失、両方の機能が同時にトリップする | Ii ≥ 1.5 × Isd を確認する | メーカー推奨の比率を使用する |
| tsdが短すぎる | 下流側の遮断器が故障を除去する前に、上流側の遮断器がトリップする | 下流側の除去時間に0.1〜0.2秒のマージンを追加する | アーク時間を含む総除去時間を計算する |
| tsdが長すぎる | 過大な故障電流持続時間、機器の損傷 | 機器の耐量定格との整合性を考慮して協調ニーズのバランスを取る | 遮断器のIcw定格がtsd持続時間をサポートしていることを確認する |
| IiがモーターのLRAより低く設定されている | モーター起動時に遮断器がトリップする | Ii ≥ 1.2 × ロックローター電流を設定する | 設定前にモーターの銘板データを取得する |
| I²tを無視する | 無害な過渡現象による早期トリップ | 頻繁な突入電流が発生する負荷に対してI²tを有効にする | 負荷特性を理解する |
| 協調検討なし | ランダムなトリップパターン、大規模な停電 | 時間電流特性曲線分析を実施する | 協調ソフトウェアを使用するか、メーカーに相談する |
| 周囲温度を忘れる | 熱磁気式ユニットは高温環境で早期にトリップする | ディレーティングファクターを適用するか、電子式トリップユニットを使用する | 実際のパネル内部温度を測定する |
プロのヒントパネルの回路図にすべてのトリップユニット設定を文書化し、設定データベースを維持します。多くの電子式トリップユニットでは、ソフトウェアを介して設定をアップロード/ダウンロードできるため、試運転とトラブルシューティングがはるかに簡単になります。.
トリップユニットの問題のトラブルシューティング
- 症状:頻繁な不要トリップ
- Irが実際の負荷に対して低すぎる設定になっていないか確認する
- Iiがモーターの起動電流または変圧器の突入電流を下回っていないか確認する
- 周囲温度が遮断器の定格範囲内であることを確認する
- 電圧降下と電流スパイクを引き起こす緩い接続がないか点検する
- 症状:遮断器が過負荷時にトリップしない
- Irの設定が負荷要件と一致していることを確認する
- 熱磁気式ユニットが温度補償されているか確認する
- メーカーの手順に従ってトリップユニットの機能をテストする
- 遮断器が電気的寿命の終わりに達していないことを確認する
- 症状:選択性の喪失(誤った遮断器がトリップする)
- 協調検討を見直す—上流側のIsdが低すぎる可能性がある
- tsdの設定が適切な時間マージンを提供していることを確認する
- 下流側の遮断器のIiが上流側のIsdを超えていないか確認する
- 故障電流レベルが設計上の仮定と一致していることを確認する
- 症状:目的のIr値を設定できない
- 定格プラグ(装備されている場合)が調整範囲を制限しているか確認する
- トリップユニットモデルが必要なIr範囲をサポートしていることを確認する
- 異なるフレームサイズまたはトリップユニットモデルへの変更を検討する
解決しない問題については、VIOXテクニカルサポートが、通信機能を備えた電子式トリップユニットのリモート診断を提供したり、体系的なテスト手順をご案内したりできます。.
最新システムとの統合
高度なVIOX電子式トリップユニットは、基本的なLSI保護を超える機能を提供します。
- 通信プロトコルSCADA/BMSとの統合のためのModbus RTU、Profibus、Ethernet
- イベントログトリップイベント、負荷プロファイル、およびアラーム状態を記録します
- 予知保全接点の摩耗、動作回数、および熱ストレスを監視します
- リモート設定パネルを開かずにソフトウェアを介してパラメータを調整します
- 地絡保護人員および機器保護のための統合されたIg設定
- アークフラッシュ低減メンテナンスモードでは、インシデントエネルギーを削減するためにIiを一時的に下げます
これらの機能は特に 業務用EV充電, 、データセンター、およびダウンタイムのコストが高く、予防的なメンテナンスが不可欠な重要なインフラストラクチャ。.
FAQ: MCCBトリップユニットの設定
Q: MCCBトリップユニットのIrは何を意味しますか?
A: Irは「長時間整定電流」または「定格電流設定」を意味します。これは、ブレーカーがトリップせずに通電できる連続電流を表し、通常、ブレーカーの公称定格(In)の0.4〜1.0倍に調整可能です。たとえば、400Aのブレーカー(In = 400A)があり、Irを0.8に設定した場合、有効な連続定格は320Aになります。Irは、逆時間特性を使用して持続的な過負荷から保護します。過負荷が大きいほど、トリップは速くなります。.
Q: 負荷に対する正しいIr設定はどのように計算しますか?
A: 次の式を使用します。 Ir = 負荷電流 ÷ 0.8 (NEC/IEC 80%規則に基づく連続負荷の場合)。たとえば、100Aの連続負荷には、Ir = 100A ÷ 0.8 = 125Aが必要です。ブレーカーのInが160Aの場合、Irダイヤルを125A ÷ 160A = 0.78に設定します(最も近い設定が0.8の場合は0.8に丸めます)。常に、Irが回路内の最小導体の許容電流を超えないことを確認し、必要に応じてディレーティングを考慮してください。 周囲温度によるディレーティング (必要に応じて)。.
Q: IsdとIiの違いは何ですか?
A: Isd (短時間整定)と Ii (瞬時整定)はどちらも短絡から保護しますが、応答時間が異なります。Isdには、下流のブレーカーが最初に故障を除去できるように、意図的な時間遅延(tsd、通常0.05〜0.4秒)が含まれています。これにより、選択遮断が可能になります。Iiは、重大な故障に対して遅延なしで即時トリップ(<50ms)を提供します。Isdを「協調保護」、Iiを「最後の手段の保護」と考えてください。適切に協調されたシステムでは、Iiはオーバーラップを避けるためにIsdよりも少なくとも1.5倍高く設定する必要があります。.
Q: 瞬時トリップの代わりに短時間遅延(tsd)が必要なのはなぜですか?
A: 短時間遅延により、 選択性—システム全体に通電したまま、故障した回路のみを分離する機能—が可能になります。tsdがない場合、システム内のどこかで故障が発生すると、メインブレーカーがトリップし、完全な停電が発生する可能性があります。上流のブレーカーに0.1〜0.4秒の遅延を追加することで、下流のブレーカーに最初に故障を除去する時間を与えます。これにより、停止範囲が最小限に抑えられ、システムの信頼性が向上します。ただし、tsdでは、ブレーカーが遅延時間中に故障電流に耐えることができる必要があります(Icw定格を確認してください)。.
Q: IiをIsdより低く設定できますか?
A: いいえ、これは2つの別々の保護ゾーンを持つ目的を無効にする一般的な間違いです。. Iiは、適切な協調を維持するために、常にIsdよりも高く(通常は1.5〜2倍高く)する必要があります。Ii ≤ Isdの場合、故障時に両方の機能が同時にアクティブになり、時間遅延のある短時間保護の利点がなくなります。最新のトリップユニットのほとんどは、IiをIsdより低く設定しようとすると、Iiを自動的に調整することでこのエラーを防ぎますが、調整後に常に設定を確認してください。 (通常は1.5〜2倍高く)する必要があります。Ii ≤ Isdの場合、故障時に両方の機能が同時にアクティブになり、時間遅延のある短時間保護の利点がなくなります。最新のトリップユニットのほとんどは、IiをIsdより低く設定しようとすると、Iiを自動的に調整することでこのエラーを防ぎますが、調整後に常に設定を確認してください。.
Q: I²t保護とは何ですか?また、いつ使用する必要がありますか?
A: I²t保護 (「熱メモリ」とも呼ばれます)は、時間経過に伴う電流の累積的な加熱効果を考慮します。これにより、持続的な熱ストレスから保護しながら、短時間で無害な電流スパイク(モーターの始動、変圧器の突入電流)による不要なトリップを防ぎます。I²tを有効にする場合:頻繁に始動するモーター回路、変圧器の一次側、または反復的な高い突入電流が発生する負荷。I²tを無効にする場合:発電機保護(即時応答が重要な場合)、単純な放射状システム、または遅延が許容されないアプリケーション。I²tは、上流のヒューズとの協調を実現するのに特に役立ちます。.
Q: 上流と下流のブレーカー間でトリップ設定をどのように協調させますか?
A: 次の規則に従ってください。(1) 上流Ir ≥ 2× 下流Ir 複合負荷を処理するため。(2) 上流Isd > 下流Ii 下流のブレーカーの瞬時保護が上流の短時間保護と重複しないようにするため。(3) 上流のtsd ≥ 下流の全遮断時間 + 0.1〜0.2秒のマージン 下流のブレーカーが最初に遮断されるようにするため。(4) 上流Ii ≥ 2× 下流Ii 最終的なバックアップのため。時間電流曲線解析ソフトウェアを使用して、すべての故障レベルで協調を確認します。VIOXは無料の協調支援を提供しています。システムの単線結線図を添えて、当社の技術チームにお問い合わせください。.
要点
- Ir(長時間保護) は、連続電流定格を設定し、実際の負荷電流を0.8で割った値(80%負荷規則)に基づいて計算する必要があり、導体の許容電流を超えることはありません。.
- Isd(短時間整定) は、トリップ前に意図的な遅延(tsd)を追加することで選択遮断を可能にし、下流のブレーカーが最初に故障を除去できるようにします。これは、協調されたシステムで停止範囲を最小限に抑えるために不可欠です。.
- Ii(瞬時保護) は、重大な故障に対して即時トリップを提供し、保護ゾーン間の適切な分離を維持するために、Isdよりも少なくとも1.5倍高く設定する必要があります。.
- 電子トリップユニット は、調整可能なIr(0.4〜1.0 × In)、Isd(1.5〜10 × Ir)、およびIi(2〜15 × Ir)の範囲に加えて、I²t保護や通信などの高度な機能を備えており、熱磁気ユニットよりもはるかに優れた柔軟性と精度を提供します。.
- 協調には体系的な計画が必要です。:上流のブレーカーは、下流のデバイスよりも高い整定値と長い時間遅延を持つ必要があり、上流のIsd > 下流のIiおよび上流のtsd ≥ 下流の遮断時間 + マージンの規則に従います。.
- I²t保護 (熱メモリ)は、持続的な過負荷に対する保護を維持しながら、短時間の突入電流による不要なトリップを防ぎます。モーターおよび変圧器のアプリケーションでは有効にし、発電機および単純なシステムでは無効にします。.
- 一般的な間違い には、Irを高く設定しすぎる(導体損傷のリスク)、Ii ≤ Isdを設定する(選択遮断の喪失)、およびモーターの始動電流を無視する(不要なトリップを引き起こす)ことが含まれます。常に負荷特性と協調要件に対して設定を確認してください。.
- 時間電流曲線解析 は、複雑なシステムに不可欠です。メーカーが提供するソフトウェアを使用するか、VIOXテクニカルサポートに相談して、すべての故障電流レベルで協調を確認し、適切な選択遮断を確保してください。.
- ドキュメントとテスト は重要です。すべてのトリップユニット設定をパネル図に記録し、試運転テストを実行して動作を確認し、将来のトラブルシューティングと変更のために設定データベースを維持します。.
信頼性が高く、正確に構成された回路保護については、VIOXの完全なラインナップをご覧ください。 高度な電子トリップユニットを備えたMCCB. 。当社のエンジニアリングチームは、トリップユニットの選択、協調調査、および試運転支援に関する包括的なサポートを提供し、お客様の配電システムが安全かつ効率的に動作することを保証します。お客様固有の要件に合わせてIr、Isd、およびIiの設定を最適化するためのアプリケーション固有のガイダンスについては、お問い合わせください。.
