
直接回答
トリップクラスは、IEC 60947-4-1およびNEMA規格によって定義された標準化された定格システムであり、モーター保護デバイス(熱動過負荷継電器またはモーター保護用サーキットブレーカー)が、定格電流の600%(または7.2倍)を受けた場合に、モーターをトリップして切り離すのにかかる最大時間を指定します。. クラス番号は、この過負荷レベルでの最大トリップ時間を秒単位で直接示します。クラス10は10秒以内、クラス20は20秒以内、クラス30は30秒以内にトリップします。この分類により、保護デバイスの応答時間がモーターの熱損傷曲線と一致し、通常の始動条件下での不要なトリップを回避しながら、巻線絶縁の故障を防ぎます。.
要点
- ✅ トリップクラスの定義:クラス番号(5、10、10A、20、30)は、リレーの電流設定の600%(NEMA)または7.2倍(IEC)でのトリップまでの最大秒数を表し、保護がモーターの熱制限に適合するようにします。
- ✅ NEMA vs. IEC 規格:NEMAモーターは通常、クラス20の保護(1.15のサービスファクターと堅牢な熱容量用に設計)を必要とし、IECモーターはクラス10(1.0のサービスファクターとより厳しい熱マージンでアプリケーション定格)を必要とします。
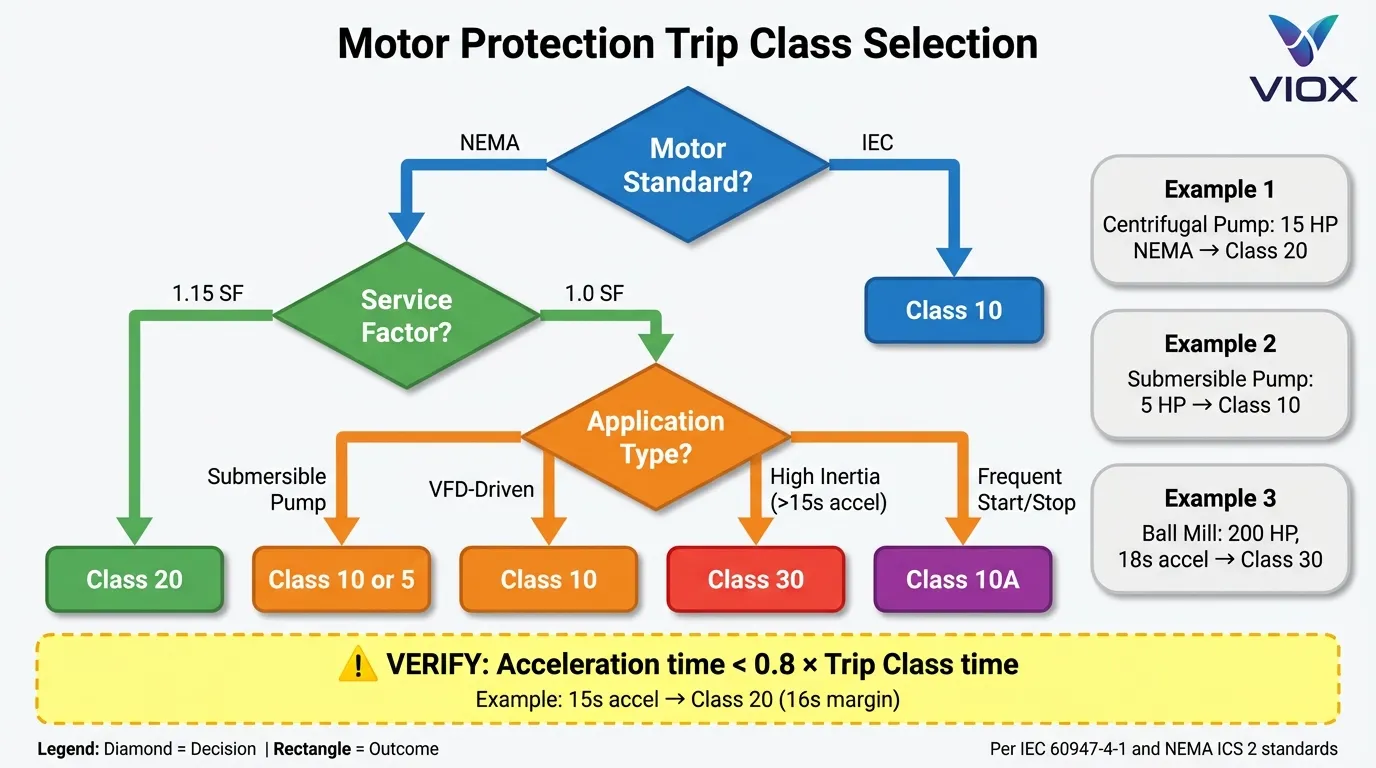
- ✅ 選考基準:迅速な応答が必要なアプリケーション(水中ポンプ、密閉型モーター、VFD駆動モーター)にはクラス10、汎用NEMAモーターにはクラス20、加速時間が長い高慣性負荷にはクラス30を選択します。
- ✅ 熱損傷曲線のマッチング:トリップクラスは、モーターの耐熱能力と一致している必要があります。保護が一致しないと、早期故障(保護不足)または不要なトリップ(過保護)が発生する可能性があります。
- ✅ コールドスタートとホットスタートの動作:トリップ曲線は、コールドスタート条件(モーターが周囲温度、より長いトリップ時間が許容される)とホットリスタートシナリオ(モーターが動作温度に近い、より迅速な保護が必要)の両方を考慮しています。
トリップクラスの理解:モーター保護の基礎
トリップクラスの真の意味
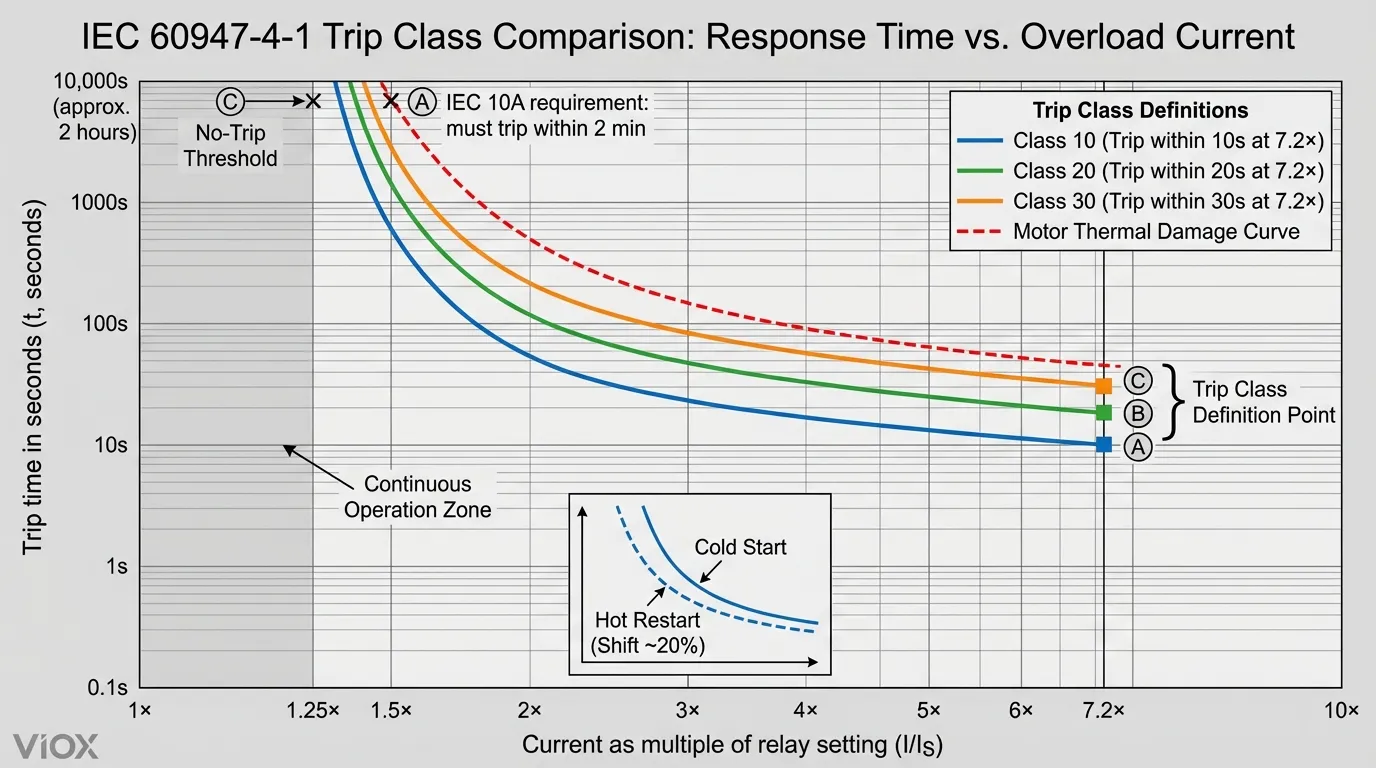
トリップクラスは単なるタイミング仕様ではありません。保護デバイスの応答特性とモーターの熱ストレスに対する耐性との間の慎重に設計された相関関係を表しています。IEC 60947-4-1によると、トリップクラスは完全な保護曲線を確立する2つの重要な動作点を定義しています。
主要定義点(高電流):
- NEMA規格:リレー設定の600%でクラス時間(秒)以内にトリップ
- IEC規格:リレー設定の7.2倍でクラス時間(秒)以内にトリップ
二次定義点(中程度の過負荷):
- 設定の125%で:2時間以内にトリップしてはならない(コールドスタート)
- 設定の150%で:クラスに基づいて特定の時間内にトリップする必要がある(IEC 10A:<2分)
この二点定義により、モーターの熱損傷プロファイルを反映する逆時間特性曲線が作成されます。過負荷が高いほど、トリップ応答が速くなります。.
トリップクラス選択の背後にある物理学
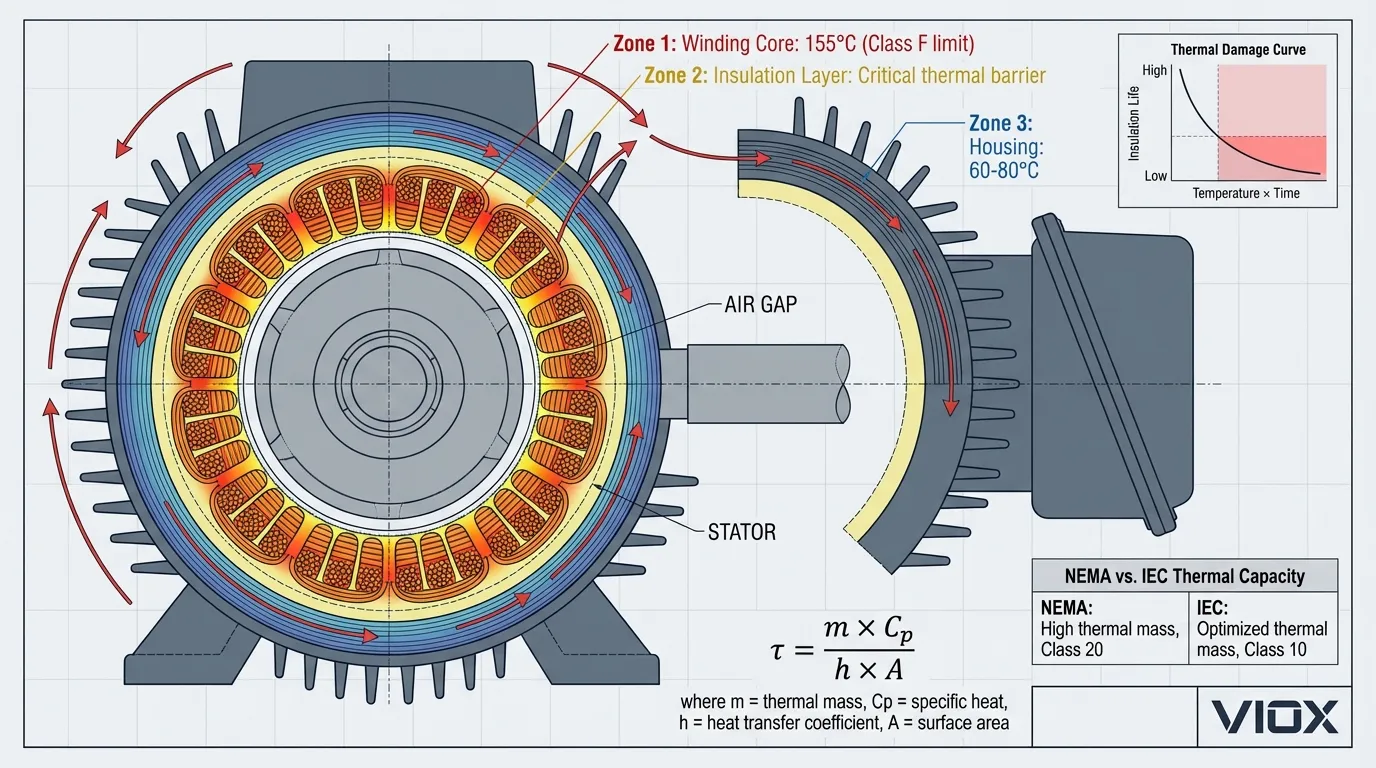
モーター巻線絶縁は「10度ルール」に従います。定格温度より10°C上昇するごとに、絶縁寿命は半分になります。過負荷状態では、I2巻線内のR加熱は電流とともに指数関数的に増加します。トリップクラスは、蓄積された熱エネルギー(∫ I²·t dt)がモーターの耐熱能力を超える前に、保護デバイスが電力を遮断することを保証する必要があります。.
熱時定数の関係:
τモーター > τリレー × 安全率
どこでだ:
- τモーター = モーターの熱時定数(通常、密閉型モーターの場合は30〜60分)
- τリレー = リレーの熱時定数(クラスによって異なる)
- 安全率 = 通常1.2〜1.5倍で、周囲の変動を考慮
標準トリップクラス:完全な比較
IEC 60947-4-1トリップクラス
| トリップクラス | 7.2×Iでのトリップ時間r | 代表的な用途 | モータータイプの互換性 |
|---|---|---|---|
| クラス5 | ≤5秒 | 熱的に敏感なモーターのための非常に高速な保護 | 密閉型コンプレッサー、小型水中ポンプ |
| クラス10 | ≤10秒 | 標準IECモーター、VFDアプリケーション | IEC設計Nモーター、人工冷却モーター、迅速な応答負荷 |
| クラス10A | 7.2×で≤10秒 1.5×で≤2分 |
ホットリスタート条件のための強化された保護 | 頻繁なスタート/ストップサイクルを持つIECモーター |
| クラス20 | ≤20秒 | 汎用NEMAモーター | 1.15 SFのNEMA設計A/Bモーター、標準的な産業用アプリケーション |
| クラス30 | ≤30秒 | 高慣性、拡張された加速負荷 | ミルデューティーモーター、クラッシャー、大型ファン、遠心分離機 |
NEMAトリップクラス規格
NEMA規格はIEC定義と一致していますが、基準点として7.2×の代わりに600%(6×)を使用しています。実際的な違いはごくわずかです。どちらのシステムも同等の保護曲線を作成します。.
NEMA固有の重要な考慮事項:
- クラス20の優位性:NEMAモーターの約85%は、標準化された1.15のサービスファクターと堅牢な熱設計により、クラス20保護用に設計されています。
- 拘束回転時間:NEMA MG-1は、≤500 HPのモーターが通常の動作温度で≥12秒間、拘束回転電流に耐えることを要求しており、これはクラス20保護と一致しています。
- サービスファクターの相互作用:1.15 SFのモーターは、115%の連続過負荷に対応できるため、この能力を妨げないトリップカーブが必要です。
トリップクラス選択ガイド:アプリケーションに合わせた保護
決定マトリックス:必要なトリップクラスは?
| モーター特性 | 推奨トリップクラス | 理由 |
|---|---|---|
| NEMA設計A/B、1.15 SF | クラス20 | 標準的な熱容量、12〜20秒の拘束回転耐性 |
| IEC設計N、1.0 SF | クラス10 | アプリケーション定格、より厳しい熱マージン、10秒の拘束回転耐性 |
| 水中ポンプモーター | クラス10またはクラス5 | 液冷式、流量停止時の急速な温度上昇 |
| VFD駆動モーター | クラス10 | 低速時の冷却低下、インバーター駆動時のサービスファクターなし |
| 高慣性負荷(>5秒の加速) | クラス30 | 起動時間の延長、不要なトリップの防止 |
| 頻繁な起動/停止(>10サイクル/時間) | クラス10A | ホットリスタート保護、150%で2分間のトリップ |
| 密閉型モーター | クラス5またはクラス10 | 外部冷却なし、急速な温度上昇 |
重要なアプリケーションシナリオ
シナリオ1:15 HP NEMAモーターを備えた遠心ポンプ
モーター仕様:
- 全負荷電流(FLA):20A
- サービスファクター:1.15
- 拘束回転電流:120A(6×FLA)
- 加速時間:3秒
分析:
- 拘束回転時間(3秒)<クラス20トリップ時間(20秒)→✅不要なトリップなし
- NEMA設計Bモーター→クラス20標準
- 1.15 SFにより、トリップなしで23Aの連続運転が可能
セレクション:クラス20熱過負荷リレー、20Aに設定
シナリオ2:5 HPモーターを備えた水中井戸ポンプ
モーター仕様:
- 全負荷電流:14A
- サービスファクター:1.0(水中ポンプにはSFなし)
- 拘束回転電流:84A(6×FLA)
- 冷却:水流に依存
分析:
- 水流の喪失=急速な過熱(外部冷却なし)
- 焼損を防ぐための迅速な保護が必要
- メーカーはクラス10保護を指定
セレクション:クラス10熱過負荷リレー、14Aに設定
シナリオ3:200 HPモーターを備えたボールミル(高慣性)
モーター仕様:
- 全負荷電流:240A
- 加速時間:18秒
- 拘束回転電流:1,440A(6×FLA)
- 負荷タイプ:高慣性、機械的時定数>10秒
分析:
- 加速時間(18秒)>クラス20トリップ時間(20秒)→⚠️限界
- 加速時間(18秒)<クラス30トリップ時間(30秒)→✅安全マージン
- 高慣性には、起動時間の延長が必要
セレクション:クラス30熱過負荷リレー、240Aに設定
NEMA対IECモーター保護:基本的な違いを理解する
設計思想の比較
| 側面 | NEMAモーター | IECモーター |
|---|---|---|
| 設計アプローチ | 保守的、汎用性のために過剰設計 | アプリケーション固有、正確なデューティ用に最適化 |
| Service Factor (サービスファクター、補償係数) | Typically 1.15 (15%連続過負荷容量) (通常1.15 (15%連続過負荷容量)) | Typically 1.0 (no overload margin) (通常1.0 (過負荷マージンなし)) |
| Thermal Capacity (熱容量) | High thermal mass, robust insulation systems (高い熱質量、堅牢な絶縁システム) | Optimized thermal design, minimal excess capacity (最適化された熱設計、最小限の余剰容量) |
| Standard Trip Class (標準トリップクラス) | Class 20 (20 seconds at 600% FLA) (クラス20 (600%FLAで20秒)) | Class 10 (10 seconds at 7.2× Ie) (クラス10 (7.2×Ieで10秒))r) |
| Locked-Rotor Withstand (拘束回転耐量) | ≥12 seconds (NEMA MG-1 for ≤500 HP) (≥12秒 (≤500 HPのNEMA MG-1)) | ~10 seconds (IEC 60034-12) (~10秒 (IEC 60034-12)) |
| 絶縁階級 | Typically Class F (155°C) with Class B rise (通常、クラスB上昇でクラスF (155°C)) | Typically Class F with Class F rise (通常、クラスF上昇でクラスF) |
| 始動電流 | 6-7× FLA (NEMA Design B) (6-7×FLA (NEMA Design B)) | 5-8× Ie (5-8×Ie)n (IEC Design N) ((IEC Design N)) |
Why IEC Motors Require Faster Protection (IECモータがより高速な保護を必要とする理由)
IEC motors are designed with tighter thermal margins because they’re engineered for specific applications rather than general-purpose use. This “application rating” philosophy means: (IECモータは、汎用ではなく特定の用途向けに設計されているため、より厳しい熱マージンで設計されています。この「アプリケーション定格」の考え方は、次のことを意味します。)
- No Service Factor Buffer (サービスファクターバッファなし): An IEC motor rated for 10 kW delivers exactly 10 kW continuously—no 15% overload margin like NEMA 1.15 SF motors (IECモータの定格が10 kWの場合、正確に10 kWを連続的に供給します。NEMA 1.15 SFモータのような15%の過負荷マージンはありません。)
- Optimized Cooling (最適化された冷却): Cooling systems are sized precisely for rated load, not over-designed (冷却システムは、定格負荷に合わせて正確にサイズ設定されており、過剰設計されていません。)
- Faster Thermal Response (より高速な熱応答): Lower thermal mass means temperature rises more quickly during overload (熱質量が小さいほど、過負荷時に温度がより速く上昇することを意味します。)
- Global Efficiency Standards (グローバル効率基準): IEC IE3/IE4 efficiency requirements drive tighter thermal designs (IEC IE3/IE4効率要件により、より厳しい熱設計が推進されます。)
Practical implication (実際的な意味合い): Using a Class 20 relay on an IEC motor can allow 10-20 seconds of damaging overload before tripping—potentially exceeding the motor’s 10-second thermal limit. (IECモータでクラス20リレーを使用すると、トリップする前に10〜20秒の有害な過負荷が発生する可能性があり、モータの10秒の熱制限を超える可能性があります。).
Cold Start vs. Hot Restart: The Hidden Complexity (コールドスタート対ホットリスタート:隠された複雑さ)
Thermal State Impact on Trip Behavior (熱状態がトリップ動作に与える影響)
Trip class specifications are based on (トリップクラスの仕様は、以下に基づいています) cold-start conditions (コールドスタート条件)—the motor and protection device are both at ambient temperature. However, real-world applications involve hot restarts after recent operation, fundamentally changing the protection dynamics. (—モータと保護デバイスの両方が周囲温度にあります。ただし、実際のアプリケーションでは、最近の動作後にホットリスタートが発生し、保護のダイナミクスが根本的に変化します。).
Cold Start Characteristics: (コールドスタートの特性:)
- Motor windings at ambient temperature (~40°C) (周囲温度(〜40°C)のモータ巻線)
- Full thermal capacity available (利用可能な完全な熱容量)
- Longer acceptable overload duration (より長い許容過負荷時間)
- Trip curve follows published specifications (トリップ曲線は公開されている仕様に従います)
Hot Restart Characteristics: (ホットリスタートの特性:)
- Motor windings near operating temperature (~120-155°C) (動作温度に近いモータ巻線(〜120〜155°C))
- Reduced thermal capacity (already partially “used”) (減少した熱容量(すでに部分的に「使用済み」))
- Shorter safe overload duration (より短い安全な過負荷時間)
- Trip curve shifts left (faster tripping) (トリップ曲線が左にシフト(より高速なトリップ))
IEC Class 10A: The Hot-Restart Solution (IECクラス10A:ホットリスタートソリューション)
IEC 60947-4-1 defines Class 10A specifically to address hot-restart protection inadequacies in standard Class 10/20 relays. The key difference: (IEC 60947-4-1は、標準のクラス10/20リレーにおけるホットリスタート保護の不備に対処するために、クラス10Aを特に定義しています。主な違い:)
| 条件 | Standard Class 20 (標準クラス20) | IEC Class 10A (IECクラス10A) |
|---|---|---|
| At 7.2× Ie (cold) (7.2×Ie(コールド))r (cold) ((コールド)) | ≤20秒 | ≤10秒 |
| At 1.5× Ie (hot) (1.5×Ie(ホット))r (hot) ((ホット)) | ~8 minutes (~8分) | ≤2 minutes (≤2分) |
| の応用 | 偶発的な接触からの基本的な保護 | Frequent start/stop, cyclic duty (頻繁なスタート/ストップ、周期的なデューティ) |
Why this matters (これが重要な理由): A motor running at full load reaches thermal equilibrium at ~120°C (Class F insulation). If it trips on overload and immediately restarts, a 150% overload can damage insulation within 2 minutes. Standard Class 20 relays may take 4-8 minutes to trip at this level, allowing thermal damage. Class 10A ensures protection within 2 minutes. (:全負荷で動作しているモータは、〜120°C(クラスF絶縁)で熱平衡に達します。過負荷でトリップし、すぐに再起動した場合、150%の過負荷により2分以内に絶縁が損傷する可能性があります。標準のクラス20リレーは、このレベルでトリップするのに4〜8分かかる場合があり、熱損傷を引き起こす可能性があります。クラス10Aは、2分以内の保護を保証します。).
Motor Protection Circuit Breakers (MPCBs) vs. Thermal Overload Relays (モータ保護サーキットブレーカ(MPCB)対サーマル過負荷リレー)
Technology Comparison (技術比較)
| 特徴 | Thermal Overload Relay (TOR) (サーマル過負荷リレー(TOR)) | Motor Protection Circuit Breaker (MPCB) (モータ保護サーキットブレーカ(MPCB)) |
|---|---|---|
| トリップ機構 | Bimetallic strip or eutectic alloy heating (バイメタルストリップまたは共晶合金加熱) | Magnetic (instantaneous) + thermal (overload) (磁気(瞬時)+熱(過負荷)) |
| Trip Class Availability (トリップクラスの可用性) | 固定(デバイス固有)または調整可能(電子式) | 固定または調整可能(電子式トリップユニット) |
| 短絡保護 | ❌ いいえ(別途ブレーカー/ヒューズが必要) | ✅ はい(一体型電磁トリップ) |
| 位相喪失検出 | ✅ はい(三相設計に固有) | ✅ はい(電子式モデル) |
| 調整機能 | 電流設定は調整可能、クラスは通常固定 | 電流+クラス調整可能(電子式モデル) |
| リセット方法 | 手動または自動 | 手動(トリップフリー機構) |
| 代表的な用途 | 電磁接触器ベースのスターター、IECアプリケーション | スタンドアロンモーター保護、NEMA/IECハイブリッド |
| 規格 | IEC 60947-4-1(TOR)、NEMA ICS 2 | IEC 60947-4-1(MPSD)、IEC 60947-2(ブレーカー) |
各技術の使用場面
熱動過負荷継電器の選択場面:
- 電磁接触器ベースのモータースターターを使用する場合(標準IEC/NEMA構成)
- 上流の回路ブレーカーまたはヒューズによる短絡保護
- コスト重視のアプリケーション
- 既存の電磁接触器システムでの交換/レトロフィット
モーター保護用サーキットブレーカーの選択場面:
- 単一デバイスで統合保護(過負荷+短絡)が必要な場合
- スペース制約(MPCBは電磁接触器+ TOR +ブレーカーよりもコンパクト)
- 電磁接触器なしの直接投入(DOL)始動
- 頻繁な手動スイッチングが必要な場合(MPCBには組み込みの遮断機能がある)
一般的なトリップクラス選択の間違いと解決策
間違い1:IECモーターでのクラス20保護の使用
症状:モーターが早期に故障、巻線絶縁破壊、トリップが発生しない
根本原因:IECモーターはクラス10保護(10秒の熱制限)用に設計されているが、クラス20リレー(20秒のトリップ時間)で保護されている。10秒のギャップにより熱損傷が発生する。.
液:
- 常にモーターメーカーのトリップクラス要件を確認する(モーターのドキュメントまたは銘板を確認)
- NEMAモーターをIEC同等品に交換する場合は、トリップクラスの互換性を確認する
- 柔軟性を高めるために、調整可能なトリップクラスを備えた電子式過負荷継電器を使用する
間違い2:NEMAモーターでのクラス10リレーによる不要なトリップ
症状:特に慣性負荷が高い場合、通常の始動中にモーターがトリップする
根本原因:18秒の加速時間を持つNEMA Design Bモーターが、クラス10リレー(10秒トリップ)で保護されている。モーターが全速に達する前に、拘束回転電流(6×FLA)がトリップしきい値を超える。.
液:
- 実際の加速時間を計算する:taccelaccel = (J · ω) / (Tstartモーター – Tloadload))
- 確認事項:taccelaccel < 0.8 × ttrip旅行クラス (20%の安全マージン)
- この場合:クラス20またはクラス30リレーを使用する
間違い3:ホットリスタート条件の無視
症状:コールドスタート保護は正しいにもかかわらず、複数の急速なスタート/ストップサイクル後にモーターが故障する
根本原因:頻繁なサイクルにより、モーターが高温に保たれる。標準のクラス20リレーは150%の過負荷(高温状態)で8分間許容するが、モーターは2分間しか耐えられない。.
液:
- 1時間あたり>6回の始動があるアプリケーションの場合:IECクラス10A保護を使用する
- 最小オフ時間遅延を実装する(始動間のモーター冷却を許可する)
- モーターの温度履歴を追跡する熱モデルベースの電子式リレーを検討する
間違い4:リレー電流設定の過大評価
症状:モーターが継続的に高温で動作し、最終的に絶縁が故障し、リレーがトリップしない
根本原因:20Aモーターに対してリレーが25Aに設定されている(FLAの125%)。連続23A負荷(モーターFLAの115%)は、リレートリップしきい値に達しない。.
液:
- リレー電流をモーター銘板FLAに設定する(サービスファクター電流ではない)
- 1.15 SFの20Aモーターの場合:リレーを20Aに設定し、23Aには設定しない
- 125%(25A)でのリレートリップ曲線は、不要なトリップなしにサービスファクター動作を許可する
電子式対熱動式トリップクラス技術
バイメタル/共晶合金熱動リレー
どのように機能するか
- 電流が発熱体を流れる
- バイメタルストリップは、差動熱膨張により曲がる
- 機械的リンケージは、たわみしきい値に達するとリレー接点をトリップする
トリップクラスの特性:
- 固定トリップクラス(デバイス固有、変更不可)
- 周囲温度補償(バイメタルストリップは本質的に補償する)
- 熱メモリ(トリップ後に熱を保持し、リセット時間に影響を与える)
- トリップカーブ精度:±10~20%(機械的公差)
利点がある:
- 外部電源不要
- 電気的ノイズ/EMIに対する耐性
- シンプルで実績のある技術
- 低コスト
デメリット
- 固定トリップクラス(複数のリレータイプを在庫する必要がある)
- 急速な過負荷に対する応答が遅い
- 時間経過に伴う機械的摩耗
- 限定的な診断機能
電子式過負荷リレー
どのように機能するか
- 変流器(CT)がモータ電流を測定
- マイクロプロセッサが熱モデルを計算:θ(t) = θ0 + ∫ [(I2 – I格付け2) / τ] dt
- 計算された温度が閾値を超えるとトリップ
トリップクラスの特性:
- 選択可能なトリップクラス(DIPスイッチまたはソフトウェアでクラス5、10、10A、15、20、30を選択可能)
- デジタル熱モデル(モータ温度を継続的に追跡)
- ホットリスタート補償(電源喪失後の熱状態を記憶)
- トリップカーブ精度:±5%(デジタル精度)
利点がある:
- 単一のデバイスで複数のトリップクラスに対応(在庫を削減)
- 高度な診断機能(電流不平衡、相欠損、地絡)
- 通信機能(Modbus、Profibus、EtherNet/IP)
- プログラム可能な機能(アラーム閾値、トリップ遅延)
デメリット
- 制御電源が必要
- より複雑(初期コストが高い)
- 電気的ノイズの影響を受けやすい(適切な接地が必要)
- ファームウェアのアップデートが必要になる場合がある
トリップクラスとモータ協調:Type 1 vs. Type 2
IEC 60947-4-1 協調タイプ
モータ保護システムは、安全な故障遮断を確実にするために、短絡保護デバイス(ヒューズまたは回路ブレーカ)と協調する必要があります。トリップクラスはこの協調に影響を与えます。
Type 1 協調:
- 短絡条件下では、コンタクタまたはスタータが損傷する可能性がある
- 人または設備に危険はない
- 再起動前に修理または交換が必要になる場合がある
- トリップクラスの影響:最小限—過負荷ではなく、短絡保護に重点を置く
Type 2 協調:
- 短絡条件下では、コンタクタまたはスタータに損傷はない(接点溶着の可能性を除く)
- 人または設備に危険はない
- 故障解消後、機器はすぐに使用可能
- トリップクラスの影響:重要—コンタクタ接点が溶着する前に、過負荷リレーがトリップする必要がある
協調の例:
| モータFLA | トリップクラス | 上流ヒューズ | 協調タイプ | 最大故障電流 |
|---|---|---|---|---|
| 32A | クラス10 | 63A gGヒューズ | タイプ2 | 50 kA |
| 32A | クラス20 | 63A gGヒューズ | タイプ2 | 50 kA |
| 32A | クラス30 | 80A gGヒューズ | タイプ1 | 50 kA |
重要な洞察:トリップクラスが遅い(クラス30)ほど、協調を達成するために大きなヒューズが必要になる場合があり、Type 2の性能を損なう可能性があります。製造元は、各トリップクラスの最大ヒューズサイズを指定する協調テーブルを提供しています。.
内部リンクと関連リソース
モータ保護システムおよび関連する電気部品の包括的な理解については、これらのVIOXテクニカルガイドをご覧ください。
- サーマルオーバーロードリレーとは:モーター保護装置の完全ガイド – 熱過負荷リレーの技術、種類、および選択基準の詳細な解説
- NEMAクラス20対IECクラス10過負荷リレーガイド – NEMAおよびIECモータ保護規格の詳細な比較
- コンタクタとモータスタータ:主な違いを理解する – コンタクタと過負荷リレーがモータ制御でどのように連携するかを学ぶ
- モーター出力に基づくコンタクタとサーキットブレーカの選択方法 – 完全なモータ保護システムの実用的なサイジングガイド
- コンタクタの電気規格:AC1、AC2、AC3、AC4使用カテゴリの理解 – IEC 60947-4-1使用カテゴリの包括的なガイド
FAQ:トリップクラスの選択と適用
Q1:クラス20定格のNEMAモータでクラス10過負荷リレーを使用できますか?
A:技術的には可能ですが、ほとんどのアプリケーションでは推奨されません。クラス10リレーはより高速な保護を提供しますが(潜在的に有益)、特に慣性の高い負荷や加速時間が8秒を超えるモータの場合、通常の始動中に不要なトリップを引き起こす可能性があります。NEMAモータは、クラス20保護(600%FLAで20秒の耐性)に関連する熱ストレスを安全に処理するように設計されているため、クラス10を使用しても安全マージンが追加されるわけではありません—不要なトリップのリスクが増加するだけです。例外:モータ製造元がクラス10を特に推奨する場合(VFD動作や特殊なデューティサイクルなど)、そのガイダンスに従ってください。.
Q2:モータ銘板にトリップクラスが指定されていない場合、正しいトリップクラスをどのように決定しますか?
A:次の決定木に従ってください。
- モータの原産地を確認する: NEMA モーター (北米) → クラス 20; IEC モーター (ヨーロッパ/アジア) → クラス 10
- サービスファクターを確認: 1.15 SF → クラス 20; 1.0 SF → クラス 10
- アプリケーションタイプを確認:
- 水中ポンプ → クラス 10 または クラス 5
- VFD 駆動モーター → クラス 10
- 高慣性負荷 (加速 >15 秒) → クラス 30
- 一般産業 → クラス 20
- メーカーに相談: 不明な場合は、モーターのシリアル番号を添えてモーターメーカーにお問い合わせください。設計仕様に基づいて推奨されるトリップクラスを提供できます。.
Q3: 間違ったトリップクラスを使用するとどうなりますか?
A: 2 つの故障モード:
- 低保護 (クラスが遅すぎる): リレーがトリップする前にモーターが熱損傷を受けます。例: クラス 10 モーターのクラス 20 リレーは、10 ~ 20 秒の有害な過負荷を許容します。結果: モーターの寿命の短縮、絶縁破壊、最終的な故障。.
- 過保護 (クラスが速すぎる): リレーが通常の動作中にトリップし、迷惑なシャットダウンを引き起こします。例: 18 秒の加速を伴う高慣性負荷のクラス 10 リレー。結果: モーターが全速力に達しない、生産停止時間、保護をバイパスする可能性のある (危険な) 不満を抱いたオペレーター。.
Q4: 電子式過負荷リレーは、熱動式リレーよりも優れた保護を提供しますか?
A: 必ずしも「優れている」とは限りませんが、より柔軟で正確です。電子リレーは以下を提供します。
- 調整可能なトリップクラス (1 つのデバイス = 複数のアプリケーション)
- より高い精度 (±5% vs. ±15% (熱動式の場合))
- 高度な診断 (電流不平衡、地絡、熱状態)
- コミュニケーション (リモート監視、予知保全)
ただし、熱動式リレーには利点があります。
- 外部電源不要 (モーター電流による自己給電)
- 電気ノイズに対する耐性 (過酷な EMI 環境で重要)
- 低コスト (単純な固定アプリケーション向け)
おすすめ: 重要なアプリケーション、可変負荷、または診断/通信が必要な場合は、電子リレーを使用します。コスト重視で、単純さが重視される固定デューティアプリケーションには、熱動式リレーを使用します。.
Q5: 周囲温度はトリップクラスの性能にどのように影響しますか?
A: 周囲温度は、モーターと保護デバイスの両方に影響を与えるため、トリップ時間に直接影響します。
モーター側:
- 周囲温度が高い → 利用可能な熱容量が少ない → 温度上昇が速い
- 標準定格: 周囲温度 40°C (IEC/NEMA)
- 40°C を超える場合はディレーティングが必要 (通常、40°C を超える 1°C あたり 3%)
リレー側:
- バイメタルリレー: 本質的に補償 (バイメタルストリップは周囲温度 + 負荷加熱に応答)
- 電子リレー: 周囲温度補償設定が必要 (多くのものには温度センサーが内蔵されています)
例: 周囲温度が 50°C (標準より 10°C 高い) のモーターは、熱容量が約 10% 少なくなります。リレーは 10% 低く設定する必要があります (20A モーターの場合は 20A ではなく 18A)。または、モーターを 18A の連続運転にディレーティングする必要があります。トリップクラスは同じままですが、電流しきい値が変更されます。.
結論
トリップクラスは、単なるタイミング仕様以上のものです。モーターの熱特性と保護デバイスの応答との間の重要なリンクを表しています。クラス 5、10、10A、20、および 30 の保護のニュアンスを理解することで、エンジニアは壊滅的な故障とコストのかかる迷惑なトリップの両方を防ぐモーター制御システムを設計できます。.
覚えておくべき重要な設計原則:
- 保護をモーター設計に合わせる: NEMA モーター (クラス 20) と IEC モーター (クラス 10) は、熱容量が根本的に異なります。不適合な保護は、安全性または信頼性を損ないます。
- 実際のデューティサイクルを考慮する: コールドスタート仕様は全体像を語っていません。ホットリスタート条件 (頻繁なサイクル) では、より高速な保護 (クラス 10A) が必要になる場合があります。
- 加速時間の互換性を確認する: 実際のモーター加速時間を計算し、迷惑なトリップを防ぐために、トリップクラス時間の 80% 未満であることを確認してください。
- 最新のテクノロジーを活用する: 調整可能なトリップクラスを備えた電子式過負荷リレーは、固定熱動式リレーでは対応できない柔軟性、診断、および精度を提供します。
- 上流の保護装置との連携: トリップクラスの選択は、ヒューズおよび回路ブレーカーとのタイプ 1/タイプ 2 協調に影響します。メーカーの協調表を参照してください。
モーター効率の基準が世界的に厳しくなるにつれて (IEC IE4、IE5 が視野に入っています)、熱マージンは縮小し続けており、適切なトリップクラスの選択がこれまで以上に重要になっています。北米市場でも IEC スタイルのアプリケーション定格モーターへの移行が進んでいるため、エンジニアは長期的な信頼性を提供するシステムを指定するために、NEMA と IEC の両方の保護哲学を理解する必要があります。.
VIOXについて: VIOX Electric は、電気機器の大手 B2B メーカーであり、モーター保護回路ブレーカー (MPCB)、熱動式過負荷リレー、接触器、および産業用および商業用アプリケーション向けの包括的なモーター制御ソリューションを専門としています。当社のエンジニアリングチームは、モーター保護システムの設計、トリップクラスの選択、および協調調査に関する技術サポートを提供します。. お問い合わせ アプリケーション固有のガイダンスと製品選択の支援については。.
