
「単純な」サイジングミスがすべてを失わせる時

新しい生産ラインの制御盤設計を最終決定しています。機械チームはメインコンベア用に7.5 HPの三相モーターを指定し、あなたは細心の注意を払って電線サイズを計算し、過負荷リレーを選定し、すべての配線を規定に従って行いました。モーター制御用のロータリーカムスイッチですか?モーターの銘板には14 FLAと表示されているので、20アンペア定格のものを選びました。これで十分な余裕があるはずですよね?
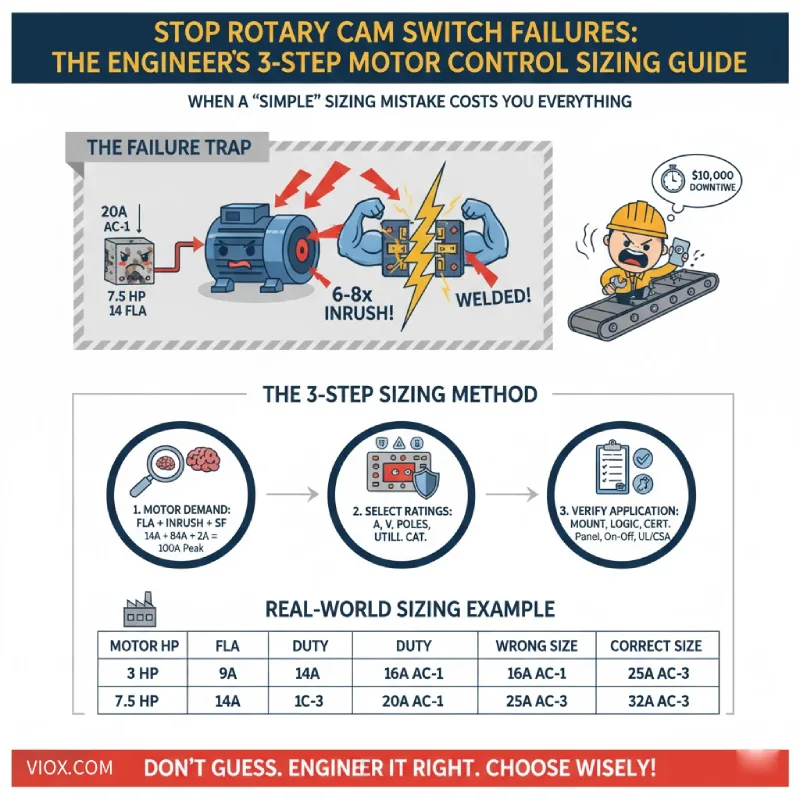
試運転から3ヶ月後、エンジニアが最も聞きたくない電話がかかってきました。コンベアが停止しないのです。ロータリーカムスイッチの接点が溶着し、モーターが制御不能な状態で回転し、生産ライン全体が緊急メンテナンスのために停止しました。事後調査の結果、スイッチの接点は焼け焦げ、交換費用は当初の部品価格の10倍になりました(ダウンタイムは含まず)。.
一体何が問題だったのでしょうか?そして、最も重要なことは、いざという時に故障しないロータリーカムスイッチをどのように選定すればよいのでしょうか?
答えは「モーターのアンペア定格に合わせる」ほど単純ではありません。このガイドでは、経験豊富なエンジニアが、データシートには必ずしも明記されていない電気的な現実を考慮して、ロータリーカムスイッチを確実にモーター制御できるように選定するための3段階の手順を学びます。.
なぜ「アンペア定格」が「モーター定格」を意味しないのか“
ロータリーカムスイッチの故障のほとんどの原因となる、厳しい現実を以下に示します。 スイッチは単に電流を流すだけでなく、負荷がかかった状態で電流を投入したり遮断したりします。. そして、その負荷がモーターである場合、電気的なストレスは非常に大きくなります。.
モーター回路のスイッチを閉じた瞬間に何が起こるかを考えてみてください。あなたが計算した「14アンペア」のモーターですか?直接投入始動の場合、モーターは 全負荷電流の6〜8倍 ローターが停止状態から加速するまでの数秒間、電流を消費します。スイッチの接点は、溶着することなくこの突入電流に耐えて閉じ、その後、壊滅的なアーク放電を起こすことなくモーターの逆起電力に耐えて開く必要があります。.
これが、スイッチに 利用カテゴリ定格 AC-1、AC-3、AC-4などの定格がある理由です。
- AC-1: 抵抗負荷(ヒーター)。負荷が軽く、突入電流が最小限で、逆起電力もありません。.
- AC-3: かご形誘導電動機の始動および運転。投入時に6倍の突入電流に対応し、運転電流で遮断します。.
- AC-4: 過酷な負荷 - モーターの逆転、反転、寸動。最大6倍のFLAで投入および遮断します。.
AC-1負荷で「20A」定格のスイッチは、AC-3負荷では5 HPのモーターしか扱えない場合があります。. 公称電流値だけでは、モーター制御能力はわかりません。.
重要な収穫 スイッチの接点、アーク抑制設計、および機械的耐久性は、「20A汎用」スイッチと「20A AC-3モーター制御」スイッチではすべて異なります。選択する前に、必ず利用カテゴリを確認してください。.
3段階 ロータリーカムスイッチ サイジング方法



モーター制御の実際の電気的ストレス(単なる理論的な銘板の数値ではない)に対応できるスイッチを指定するには、この体系的なプロセスに従ってください。.
ステップ1:モーターの真の電気的需要を計算する
モーターの銘板からFLAをコピーして終わりにするだけではいけません。モーターの完全な電気的プロファイルを理解する必要があります。
1.1 全負荷電流(FLA)から始める
定格電圧でのモーターの銘板に記載されています。例:
- 208Vで3 HP =〜9A
- 415Vで7.5 HP = 10-14A
- 480Vで15 HP = 20-22A
1.2 始動方法を考慮する
モーターの始動方法は、スイッチにかかるストレスに大きく影響します。
- 直接投入(DOL): 全突入電流がスイッチに加わります。投入時に最も負荷がかかります。.
- スターデルタ: 突入電流は少なくなりますが、始動ごとに2回のスイッチング操作が必要です。.
- ソフトスターター/VFD: 制御されたランプアップですが、それでも全運転電流を切り替える必要があります。.
1.3 サービスファクターを考慮する
モーターが連続的に、または最大負荷に近い状態で動作する場合は、サービスファクターを適用します。多くのエンジニアは、設計電流として1.15倍から1.25倍のFLAを使用します。.
ト: 415Vで14A FLAを消費する7.5 HPモーターをDOL始動する場合、スイッチは14Aの連続電流に加えて、数秒間80〜100Aの突入電流を処理できる必要があります。これは、16Aスイッチが小さすぎることをすぐに示しています。少なくともAC-3負荷で25A定格が必要です。.
ステップ2:正しい定格のスイッチを選択する
モーターのプロファイルに、対応できるスイッチを合わせます。4つの重要な仕様を確認します。
2.1 電流定格(常に切り上げ)
モーターの最大運転電流以上の電流定格を持つスイッチを選択します。余裕を持って。.
| モーターHP | 電圧 | 全負荷電流 | 推奨スイッチ電流 |
|---|---|---|---|
| 3 HP | 208 V | 〜9A | 16 A |
| 7.5 HP | 415 V | 〜10-14A | 25 A |
| 15 HP | 480 V | 〜20-22A | 25-32 A |
重要な収穫 最寄りの標準スイッチサイズに切り上げてください。モーターが22Aを消費する場合、25Aまたは32Aを選択し、20Aは絶対に選択しないでください。この余裕は、起動時の電圧低下から保護し、連続運転のための熱的な余裕を提供します。.
2.2 電圧定格(同等以上)
スイッチの電圧定格は、モーターの電源電圧と同等以上である必要があります。
- 400Vモーター → 最小400Vスイッチ
- 480Vモーター → 480Vまたは600Vスイッチ
- 480V回路で400Vスイッチを絶対に使用しないでください。
2.3 極構成
極をモーターの相構成に合わせてください。
- 単相モーター: 2極スイッチ(両方の線導体を切り替え)
- 三相モーター: 3極スイッチ(3つの相すべてを同時に切り替え)
重要: 単相のみを切り替えて三相モーターを制御するために単極スイッチを使用しないでください。これは相の不均衡を生み出し、モーターを破壊する可能性があります。.
2.4 使用区分(隠れた仕様)
ここでエンジニアは失敗します。スイッチが特定の負荷に対して定格されていることを確認してください。
- 標準的なDOL起動/停止: 最小AC-3
- 反転、プラッギング、または多段速度制御: AC-4が必要
- オンオフ切り替えのみ(起動負荷なし): AC-3で十分
「25A AC-1」と定格されたスイッチは、AC-3負荷で12Aしか処理できない場合があります。. 常にメーカーのモーター制御定格表を確認してください。公称定格が適用されると想定しないでください。.
ステップ3:アプリケーション固有の要件を確認する
電気的定格は正しいです。次に、物理的および環境的仕様を確認します。
3.1 取り付けとエンクロージャー
- パネル取り付け: 操作ハンドル付きドア前面
- DINレール: 密集した制御盤のための省スペース
- 密閉型: ほこりっぽいまたは洗い流し環境向けのIP65/NEMA 4
3.2 制御ロジックと位置
- 2ポジション(オンオフ): 簡単な起動/停止
- 3ポジション(オフ-1-2): 2速モーター、スターデルタ移行
- スプリングリターンゼロ: 実行のための維持接点、ジョグのための瞬間接点
- パッドロック可能: メンテナンスのための安全ロックアウト/タグアウト
3.3 認証とコンプライアンス
スイッチが管轄区域の認証を取得していることを確認してください。
- 北米: UL/CSAリスト
- ヨーロッパ: IEC/EN 60947-3準拠
- 産業環境: UL 508またはIEC 60947-5-1定格を確認してください
ト: アプリケーションに反転またはスターデルタ制御が含まれる場合、正しい内部カムシーケンスを備えたカムスイッチが必要です。標準のオンオフスイッチは機能しません。カムは、移行中の位相の重なりを防ぐために、正しい順序でL1-L2-L3を切断する必要があります。.
実際のサイジング例
完全な仕様を見ていきましょう。
アプリケーション クリーンな製造環境のコンベヤーシステム用の10 HP三相モーター、460V、ダイレクトオンライン起動。.
ステップ1 – モーター需要:
- 460Vでの銘板FLA:〜14A
- DOL起動突入電流:〜6倍= 84A(3〜5秒)
- サービスファクター:1.15倍= 16A設計電流
ステップ2 – スイッチの選択:
- 電流定格:25A(16Aから次のサイズ)
- 電圧定格:600V(460V要件を超える)
- 極構成:3極(三相モーター)
- 使用区分:モーター起動負荷用に定格されたAC-3
ステップ3 – アプリケーションの詳細:
- 取り付け:ロータリーハンドル付きフロントパネル
- 位置:2ポジション(オフ-ラン)、スプリングリターンなし
- 環境:IP20(クリーンな屋内環境)
- 認証:産業用制御に関するUL 508規格に準拠
結果: モーター制御用に、フロントパネル取り付け、2ポジション(オフ-ラン)操作、AC-3定格の25A、3極、600Vロータリーカムスイッチを指定してください。.
結論:適切なサイズ選定が重要な理由
真のモーター需要の計算、正しい定格と利用カテゴリを持つスイッチの選択、アプリケーション固有の検証という3段階の方法に従うことで、最も一般的な3つの故障モードを排除できます。
- ✓ 突入電流による接点溶着: 適切なAC-3/AC-4定格が投入・遮断の責務に対応
- ✓ サイズ不足による熱過負荷: 適切な電流マージンが慢性的な過熱を防止
- ✓ 不適切な責務定格によるアーク損傷: 利用カテゴリの一致により、接点材料がストレスに対応できることを保証
適切なサイズのロータリーカムスイッチは、単に規格を満たすだけでなく、故障しない制御システムを設計することです。. 20Aと25Aのスイッチの初期コストの差はわずかです。溶着したスイッチの交換費用、緊急停止時間、潜在的な安全事故の費用は?それがあなたを夜も眠れなくさせるものです。.
次のモーター制御盤は、当て推量以上の価値があります。. この方法を使用し、利用カテゴリを確認し、常に切り上げてください。将来のあなた自身と生産管理者が感謝するでしょう。.
