 ガイド: モーターおよび配電保護における10In 対 12In")
直接回答
MCCBの瞬時トリップ設定について、以下を使用してください。 配電負荷には10In (照明、コンセント、混合回路)および モーター負荷には12In 直入れ始動の場合。瞬時トリップ倍数は、ブレーカーが遅延なく即座にトリップする電流閾値を決定します。低すぎると、モーター起動時に不要なトリップが発生します。高すぎると、短絡保護が損なわれ、安全上の危険が生じます。正しい倍数は、ピーク突入電流を少なくとも20%上回り、かつ、法規で義務付けられた時間内に危険な故障を除去できる程度に低くする必要があります。.
要点
重要な選択ルール:
- 配電回路(照明、コンセント):10Inの瞬時設定
- 直入れモーター(DOL):7×FLAの突入電流を乗り切るために12Inの瞬時設定
- 混合負荷:主要な負荷特性に合わせて設定
- 常に確認:Ii設定 > 1.2×ピーク突入電流
- MCCB ≠ MCB:MCCBは曲線タイプ(B、C、D)ではなく、倍数設定(10In、12In)を使用します。
避けるべき一般的な間違い:
- MCCBの瞬時設定とMCBのトリップ曲線を混同する
- 周囲温度によるディレーティング要件を無視する
- 「安全のため」に倍数を大きくしすぎる(保護性能が低下する)
- 高効率モーターに10Inを使用する(最低12Inが必要)
MCCBの瞬時トリップ設定の理解
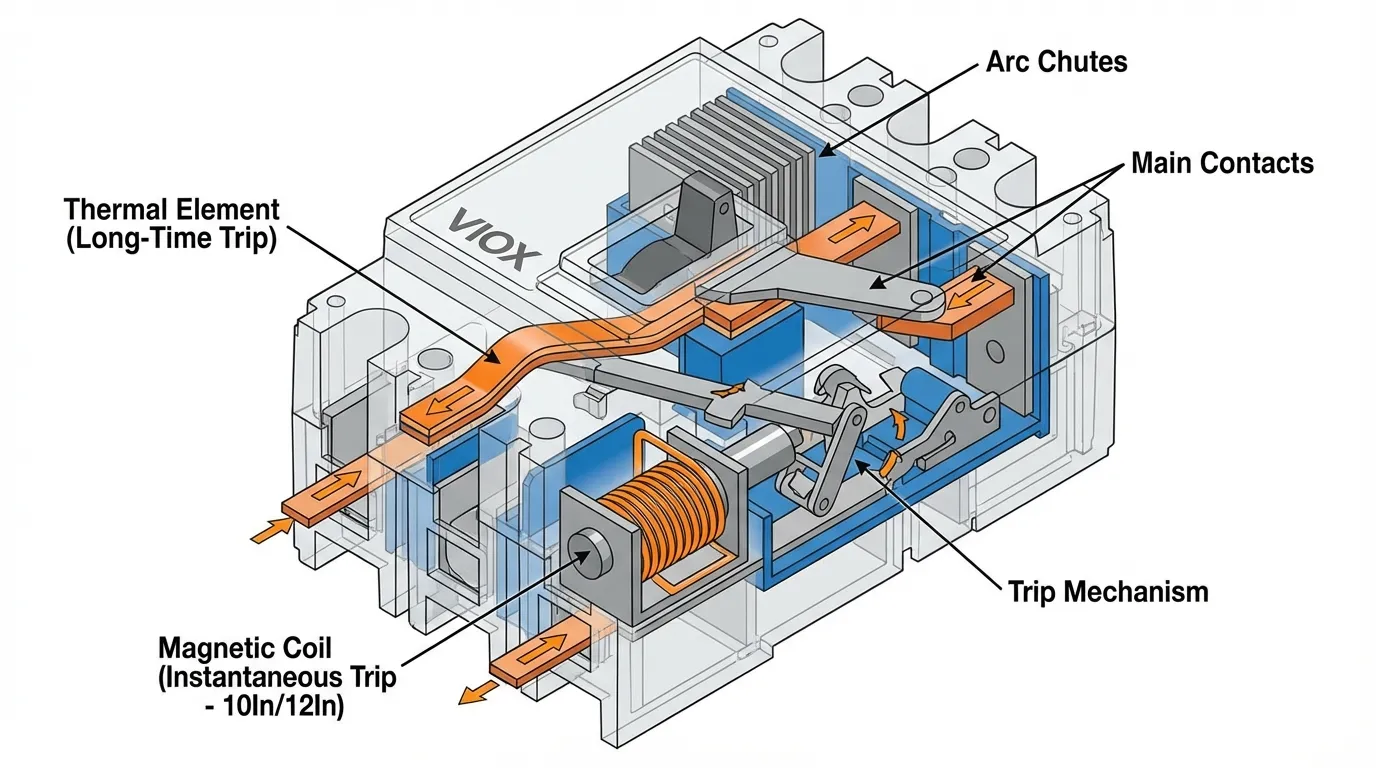
モールドケースサーキットブレーカーの瞬時トリップ機能は、意図的な遅延なしに深刻な過電流に応答する磁気要素を表します。逆時間-電流関係を通じて段階的な過負荷を処理する熱要素とは異なり、瞬時要素は、電流がプリセットされた閾値を超えるとミリ秒以内に動作します。この閾値は、ブレーカーの定格電流(In)の倍数として表され、通常、アプリケーションの要件に応じて5Inから15Inの範囲です。.
MCCBまたはその設定に「10In」とマークされている場合、これは電流がブレーカーのアンペア定格の10倍に達すると磁気トリップが作動することを意味します。100Aのブレーカーが10Inに設定されている場合、瞬時トリップは約1,000Aで発生します。ほとんどの熱磁気トリップユニットに固有の±20%の公差は、実際のトリップポイントが800Aから1,200Aの間になることを意味します。この公差範囲を理解することは、保護デバイスを調整したり、特定の突入電流に合わせてサイズを決定したりする際に非常に重要です。.
瞬時設定は、2つの競合する目的を果たします。まず、モーターの始動、変圧器の励磁、またはコンデンサバンクの切り替えなどの通常の過渡イベント中に不要なトリップを回避できる程度に高くする必要があります。次に、導体、バスバー、または接続された機器が短絡力による熱的または機械的損傷を受ける前に、迅速な故障除去を提供できる程度に低くする必要があります。このバランスを実現するには、設置場所での特定の負荷特性とシステム故障レベルを理解する必要があります。.

10In vs 12In:技術的な比較
| パラメータ | 10In設定 | 12In設定 |
|---|---|---|
| 主な用途 | 配電回路、照明、コンセント | 直入れ始動のモーター回路 |
| トリップ閾値(100Aブレーカー) | 1,000A(±20%) | 1,200A(±20%) |
| 最大突入電流許容値 | ~7×定格電流 | ~10×定格電流 |
| 一般的な負荷タイプ | 抵抗負荷、小型電子機器、LED照明 | 誘導モーター、ポンプ、コンプレッサー、ファン |
| 協調保護の利点 | より速い故障除去、より良い選択性 | トリップせずにモーターLRAを乗り切る |
| NECコンプライアンス | 240.6の要件を満たす | 430.52のモーター保護に適合 |
| 誤作動のリスク | 抵抗負荷には低い | 標準モーターには最小限 |
| 短絡応答 | 0.01〜0.02秒 | 0.01〜0.02秒 |
| 周囲温度によるディレーティングの影響 | 連続定格を考慮する必要がある | 高温環境での設置に不可欠 |
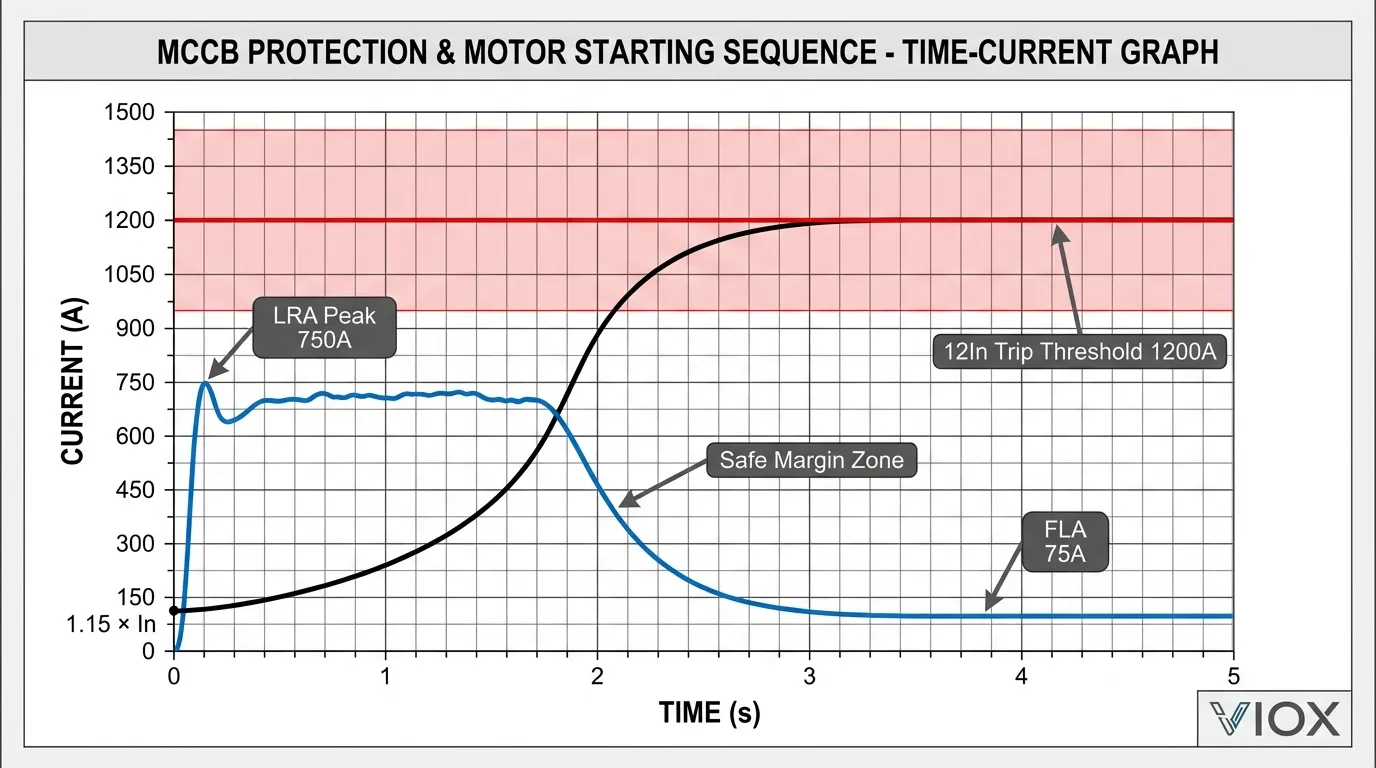
10Inと12Inの設定の根本的な違いは、突入電流の大きさを考慮している点にあります。標準的な三相誘導モーターは、全負荷電流の6〜8倍の拘束回転子電流を示し、非対称ピークは最初の半サイクル中に対称RMS値の1.4〜1.7倍に達します。全負荷で70Aを消費する37kWモーターは、約490Aの対称突入電流を生成し、非対称ピークは700〜800Aに近づきます。100Aブレーカーの10In設定(1,000A閾値)はマージンが不十分ですが、12In(1,200A閾値)は信頼性の高い動作を提供します。.
最新の高効率モーターは、この計算をさらに複雑にします。銅損を削減し、力率を改善する設計の改善により、始動電流倍数も同時に増加しました。古いモーターが6×FLAで始動する可能性がある場合、現代のプレミアム効率設計は、多くの場合7〜8×FLAに達します。NECは、第430.52条でこの現実を認識しており、高効率モーターを保護する逆時間ブレーカーの場合、モーターFLAの最大1,100%までの瞬時トリップ設定を許可しています(標準設計の場合は800%)。この規制上の承認は、最新のモーターアプリケーションにおける12In設定の実用的な必要性を裏付けています。.
配電回路は対照的なシナリオを示しています。照明負荷、特にLED照明器具は、最小限の突入電流を示します。通常、1ミリ秒未満で定常状態電流の1.5〜2倍です。コンピューター、プリンター、およびオフィス機器にサービスを提供するコンセント回路も同様の動作を示します。複数の負荷の同時切り替えを考慮しても、総突入電流が回路の連続定格の5倍を超えることはめったにありません。10Inの設定は、応答性の高い短絡保護を維持しながら、十分なマージンを提供します。これらのアプリケーションで12Inを使用すると、保護協調が不必要に低下し、故障除去時間が長くなります。.
3つの実際のアプリケーション事例
事例1:ワークショップ照明回路(純粋な抵抗負荷)
システムパラメータ:
- 合計計算負荷電流:80A
- 負荷構成:LED高天井照明(70%)、コンセント(30%)
- 回路特性:純粋に抵抗性、突入電流なし
- 周囲温度:40°C(104°F)
MCCBの選択:
- フレーム定格:100A熱磁気MCCB
- 連続電流設定:100A
- 瞬時トリップ設定: 瞬時トリップ設定:10In(1,000A)
技術的根拠: LED照明技術は、従来の高輝度放電照明器具に関連する高い突入電流を排除します。最新のLEDドライバーは、マイクロ秒単位で突入電流を定常状態電流の1.5〜2倍に制限するソフトスタート回路を組み込んでいます。80Aの連続負荷と無視できる突入電流の場合、10Inの設定(1,000Aトリップポイント)は、通常の動作電流に対して12:1を超える安全率を提供します。この積極的な設定により、迅速な故障識別が可能になり、通常、5,000Aを超える利用可能な故障電流レベルで0.015秒以内に線間故障を除去します。高速な除去時間は、アークエネルギーを最小限に抑え、機器の損傷を軽減し、上流のデバイスとの協調を改善します。.
ワークショップ環境のコンセント負荷は、ハンドツール、充電器、およびポータブル機器にサービスを提供します。これらの負荷は、制御された突入電流特性を備えた力率補正された入力段を示します。複数のツールの同時励磁でさえ、総突入電流は300Aを下回ります。これは10Inの閾値内に十分に収まります。熱要素は、持続的な過負荷状態を処理し、瞬時要素は、即時の介入を必要とする真の故障状態のために予約されています。.

事例2:37kW直入れモーター(重い誘導負荷)
システムパラメータ:
- モータ定格: 37kW (50HP), 400V 三相
- 全負荷電流: 70-75A (効率と力率によって変動)
- 始動方式: 直入れ始動 (全電圧始動)
- 拘束回転子電流: 7× FLA = 490-525A (対称実効値)
- 非対称ピーク: 1.5× 対称値 = 735-788A
MCCBの選択:
- フレーム定格:100A熱磁気MCCB
- 連続電流整定: 100A (FLAより25-30%高いマージンを確保)
- 瞬時トリップ設定: 12In (1,200A)
技術的根拠: 直入れ始動は、瞬時トリップ協調にとって最も厳しいアプリケーションの一つです。モータの拘束回転子電流は、負荷慣性やトルク特性に応じて、加速中に1〜3秒間持続します。この間、MCCBの熱動要素は発熱を開始しますが、瞬時要素は、遮断器の連続定格の10倍に迫る電流レベルにもかかわらず、安定した状態を維持する必要があります。.
12Inの設定 (±20%の公差を持つ1,200Aのトリップ閾値、つまり実際のトリップ範囲は960-1,440A) は、モータの約750Aの非対称ピーク突入電流に対して重要なマージンを提供します。この25〜50%の安全率は、電源電圧の変動、始動電流を増加させるモータの経年劣化、および遮断器の公差の積み重ねを考慮しています。数千のモータ設置における現場での経験から、12Inの設定が保護の完全性を維持しながら、不要なトリップを排除することが確認されています。.
遮断器の連続定格 (100A) とモータのFLA (70-75A) の間の20〜25%のマージンは、複数の目的を果たします。モータのサービスファクタ運転に対応し、短時間の過負荷状態での熱動要素の不要なトリップを防ぎ、周囲温度の上昇に対するディレーティングマージンを提供します。周囲温度が40℃を超えるエンクロージャでは、このマージンが不可欠になります。多くのMCCBメーカーは、基準温度40℃を超える1℃あたり0.5〜1.0%のディレーティングを指定しています。.
短絡保護は、高い瞬時設定にもかかわらず堅牢です。一般的なモータ端子での利用可能な短絡電流は、変圧器のサイズとケーブルの長さに応じて、10,000Aから50,000Aの範囲です。12In (1,200A) でも、遮断器はこの閾値を超える故障に対して0.01〜0.02秒以内に応答し、モータとケーブルの耐量範囲内です。 MCCBの短時間遅延とIcw定格 は、下流保護との協調システムでのみ関連します。.
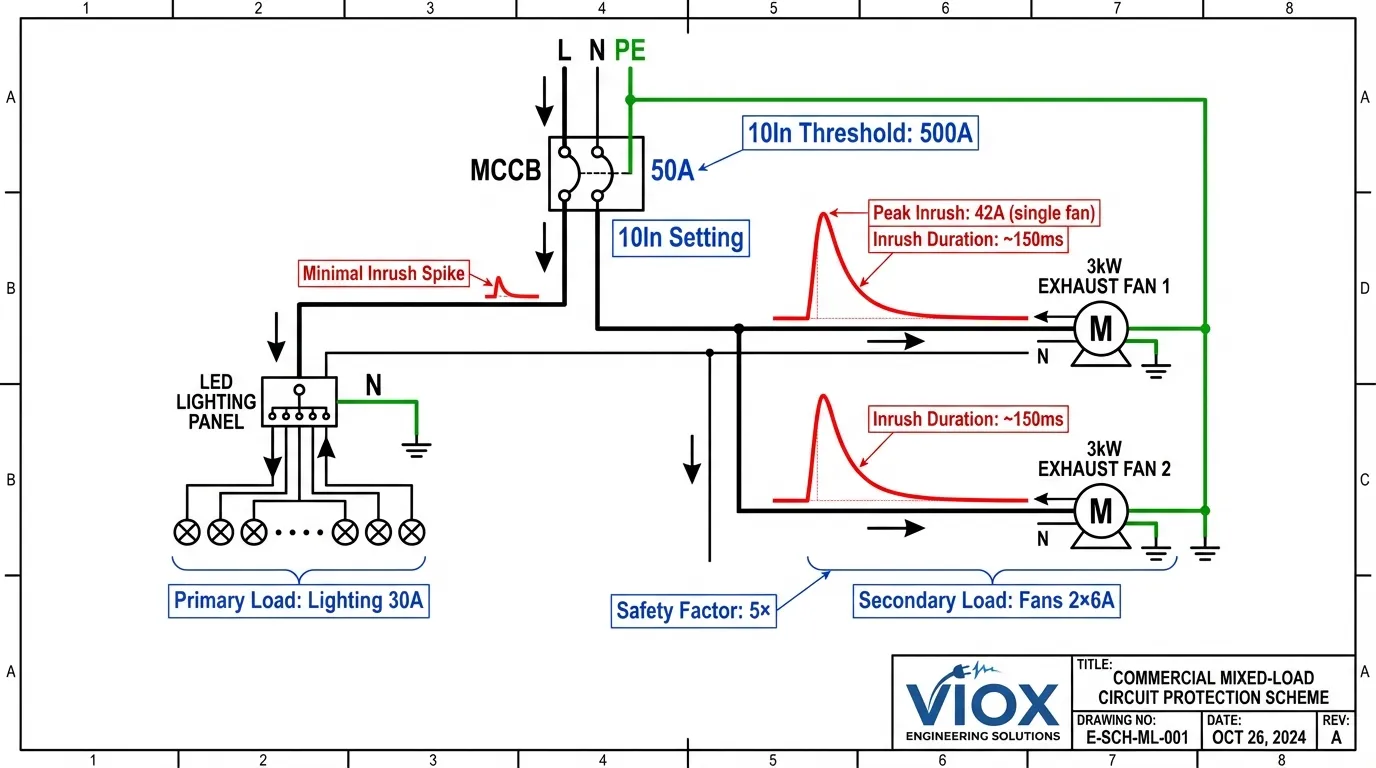
ケース3:商業用混合負荷(照明+小型モータ)
システムパラメータ:
- LED照明負荷:30Aの計算需要
- 3kW排気ファン2台:各6A FLA、始動時各42A(7倍)
- 合計連続負荷:42A
- ピーク同時突入電流:30A(照明)+42A(ファン1台始動)=72A
MCCBの選択:
- フレーム定格:50A熱磁気MCCB
- 連続電流整定:50A
- 瞬時トリップ設定: 10In (500A)
技術的根拠: 混合負荷回路では、主要負荷の保護を最適化しながら、最も要求の厳しい過渡現象に対応する瞬時設定が必要です。この商業シナリオでは、照明が支配的な連続負荷(合計の71%)を構成し、換気ファンが断続的な運転を行う二次負荷として機能します。選択の考え方は、主要負荷の特性を優先し、二次負荷の過渡現象に対する適切なマージンを確認することです。.
小型単相または三相ファンは、大型モータと同様の始動電流を示します。通常、設計に応じて6〜8×FLAです。6Aの連続電流を消費する3kWファンは、直接始動中に約42Aの突入電流を発生させます。ただし、持続時間が短く(慣性の低い小型モータでは通常0.5〜1.0秒)、通常の運転では一度に1台のファンしか始動しないという事実は、回路全体の突入電流が100Aを超えることはめったにないことを意味します。10Inの設定(500Aの閾値)は、この過渡現象に対して5:1のマージンを提供し、不要なトリップのリスクを効果的に排除します。.
このアプリケーションは、重要な原則を示しています。運用要件でそのようなシナリオが指示されない限り、瞬時設定は、すべての負荷に対する同時最悪ケースの条件に対応する必要はありません。商業用換気システムは通常、ビルディングオートメーションシステムを介してシーケンス始動を採用し、同時通電を防ぎます。手動操作でも、両方のファンが同じ半サイクル内で始動する確率はごくわずかです。エンジニアリング判断により、理論上の最悪ケースの積み重ねではなく、現実的な運用プロファイルに基づいて最適化できます。.
12Inにしない決定には説明が必要です。12In(50A遮断器の場合は600A)は追加のマージンを提供しますが、このアプリケーションでは実用的な利点はありません。既存の10In設定はすでに現実的な突入電流を5倍上回っており、より高い設定は短絡保護を低下させ、上流デバイスとの協調を複雑にします。これは重要な原則を示しています。瞬時設定は、不要なトリップを防ぐのに十分な高さである必要があり、恣意的に最大化されるべきではありません。 回路遮断器のトリップ曲線 を理解することは、エンジニアがこれらの最適化の決定を下すのに役立ちます。.
選択決定フレームワーク
10Inと12Inの瞬時設定の選択には、負荷特性、始動方法、およびシステム協調要件の体系的な評価が必要です。次のフレームワークは、産業、商業、およびインフラストラクチャアプリケーション全体に適用可能な構造化されたアプローチを提供します。.
ステップ1:負荷分類
回路の主要な負荷タイプを分類することから始めます。抵抗負荷(発熱体、白熱灯照明、抵抗制御)は、最小限または突入電流を示しません。通常、マイクロ秒単位で定常状態電流の1.5倍未満です。これらの負荷は、普遍的に10Inの設定を許可します。容量性負荷(力率改善コンデンサ、バルクコンデンサ付きの電子電源)は、短時間の高振幅突入電流を生成しますが、持続時間はミリ秒単位で測定されます。最新の設計には突入電流制限が組み込まれており、10Inがほとんどのアプリケーションに適しています。.
誘導性負荷は、慎重な分析が必要です。慣性の低い負荷(ファン、小型ポンプ)を備えた5kW未満の小型モータは、通常0.5〜1.0秒以内に始動し、突入電流は6〜7×FLAです。中程度の慣性(大型ポンプ、コンプレッサー、コンベヤー)を備えた5〜50kWの中型モータは、1〜3秒の始動時間が必要で、突入電流は7〜8×FLAです。50kWを超える大型モータ、または高慣性負荷(フライホイール、クラッシャー、大型ファン)を駆動するモータは、3〜10秒が必要で、突入電流は8〜10×FLAに近づく可能性があります。モータの 始動方法 は、これらの値に大きな影響を与えます。スターデルタ始動は、突入電流をDOL値の約33%に低減し、ソフトスタータと可変周波数ドライブは、ほぼ問題を解消します。.
ステップ2:突入電流の計算
モータ負荷の場合、モータ銘板またはメーカーデータから拘束回転子電流(LRCまたはLRA)を取得します。入手できない場合は、保守的な推定値を使用します。標準効率モータの場合は7×FLA、高効率設計の場合は8×FLAです。最悪のシナリオでは、対称実効値に1.5を掛けて非対称ピークを計算します。この非対称成分は、モータがAC波形の不利な点で通電された場合に発生するDCオフセットに起因します。.
混合負荷の場合、すべての負荷の連続電流と、単一の最大の誘導性負荷の最大突入電流を加算します。インターロックされた制御スキームを介して複数のモータが実際に同時に始動しない限り、複数のモータの突入電流を加算しないでください。この現実的な評価により、保護を低下させる過度に保守的な設定を防ぎます。.
ステップ3:設定の選択
次のルールを適用します。最大突入電流(非対称ピークを含む)が遮断器の連続定格の7倍未満の場合は、10Inを選択します。最大突入電流が遮断器の連続定格の7倍から10倍の間にある場合は、12Inを選択します。最大突入電流が遮断器の連続定格の10倍を超える場合は、代替の始動方法(スターデルタ、ソフトスタータ、VFD)を検討するか、 モータ回路保護装置 を、より高い調整可能な瞬時範囲で使用します。.
選択した設定が、計算されたピーク突入電流よりも少なくとも20%のマージンを提供することを確認します。このマージンは、遮断器の公差(通常±20%)、電源電圧の変動(ANSI C84.1あたり±10%)、モータの経年劣化の影響、およびモータと遮断器の両方の性能に対する周囲温度の影響を考慮しています。.
ステップ4:協調の検証
瞬時設定は、上流と下流の両方の保護デバイスと協調する必要があります。上流の協調については、設定が上流デバイスの瞬時閾値を下回るか、その時間遅延領域内にあることを確認して、選択性を確保します。モータ過負荷リレーまたはより小型の分岐回路遮断器との下流協調については、瞬時設定がそれらの最大トリップポイントを超えることを確認して、下流の故障時に共感トリップを防ぎます。.
最新の電子トリップユニットは、0.5Inまたは1In刻みで調整可能な瞬時設定を提供することで、このプロセスを簡素化します。熱磁気ユニットは通常、固定設定(多くの場合、配電の場合は10In、モータ保護の場合は12In)または制限された調整範囲を提供します。特定の遮断器の機能を理解することが不可欠です。遮断器のサイズだけに基づいて仮定するのではなく、メーカーのトリップ曲線と設定テーブルを参照してください。.
重要な考慮事項と一般的な間違い
温度ディレーティング要件
MCCB定格は、40℃(104°F)の周囲温度基準を想定しています。高温環境での設置では、連続電流定格のディレーティングが必要であり、間接的に瞬時トリップ協調に影響を与えます。ほとんどのメーカーは、40℃を超える1℃あたり0.5〜1.0%のディレーティングを指定しています。60℃のエンクロージャで動作する100A遮断器は、90Aの連続容量にディレーティングする必要がある場合があります。このディレーティングは熱動要素にのみ影響します。瞬時設定は、銘板定格(In)を参照したままです。ただし、熱容量の低下により、より大きなフレームサイズを選択する必要がある場合があり、その場合は適切な瞬時乗数を再計算する必要があります。.
高度は同様の課題を提示します。2,000メートル(6,600フィート)を超えると、空気密度が低下し、熱放散と絶縁耐力の両方が低下します。IEC 60947-2およびUL 489規格は、ディレーティング係数を指定しており、通常、2,000メートルを超える100メートルあたり0.5%です。高温気候の高地設置では、複合ディレーティングが発生し、有効な遮断器容量が20〜30%低下する可能性があります。 電気ディレーティング係数 を理解することは、現場での故障を防ぎ、コードコンプライアンスを確保します。.
MCBとMCCBの混同
多くのエンジニアを混乱させる重要な区別: ミニチュア回路遮断器(MCB) とモールドケース回路遮断器(MCCB)は、根本的に異なる仕様システムを使用します。MCBは、熱特性と瞬時特性の両方をパッケージとして定義するトリップ曲線指定(B、C、D、K、Z)を採用しています。「C曲線」MCBは5〜10×Inで瞬時にトリップし、「D曲線」は10〜20×Inでトリップします。これらの曲線は固定されており、調整できません。.
MCCB、特に電子トリップユニットを備えたMCCBは、長時間(熱)、短時間、および瞬時設定を個別に指定します。「10In」の瞬時設定を持つMCCBに遭遇する可能性がありますが、MCB曲線タイプとは関係ありません。これらのシステムを混同すると、仕様エラーと現場での問題が発生します。 MCCBとMCBの違い, を確認するときは、MCCBがMCBでは提供できない柔軟性を提供することを覚えておいてください。ただし、この柔軟性には、より慎重なエンジニアリングが必要です。.
過度に保守的な設定の回避
永続的な間違いは、すべてのアプリケーションで「安全のために」12Inを選択することです。このアプローチは、いくつかの点で保護を低下させます。まず、より高い瞬時設定は、閾値をわずかに超える電流の故障除去時間を延長し、アークエネルギーと機器の損傷を増加させます。次に、高い設定は、上流デバイスとの選択的協調を複雑にし、下流の故障時に不要な停止を引き起こす可能性があります。第三に、導体許容電流と絶縁定格に基づく最大故障除去時間に関するコード要件に違反する可能性があります。.
逆のエラー—「保護を改善する」ために、すべてのモータアプリケーションで10Inを選択する—は、同様に深刻な問題を引き起こします。モータ始動中の不要なトリップは、運用上の頭痛の種となり、オペレーターが保護を無効にするように誘惑し、真の問題を隠蔽します。頻繁なトリップは、遮断器の接点とメカニズムも劣化させ、耐用年数と信頼性を低下させます。正しいアプローチは、測定または計算された負荷特性に基づいて、設定をアプリケーションに一致させることであり、どちらの方向にも恣意的な保守主義ではありません。.
検証テスト
インストール後、適切なテスト手順を通じて瞬時トリップ設定を確認します。重要なモータアプリケーションの場合は、実際のモータ始動中に電力品質アナライザまたは記録アンメータで始動電流を監視します。ピーク突入電流が、計算された瞬時トリップ閾値の80%未満であることを確認します。突入電流がこのレベルを超える場合は、遮断器の設定を調整する前に、モータの状態(ベアリングの摩耗、回転子バーの損傷、または巻線の故障により始動電流が増加する可能性があります)、電源電圧の妥当性、または機械的負荷の問題を調査します。.
配電回路の場合は、瞬時設定が測定された最大突入電流を少なくとも2:1上回ることを確認します。マージンが低い場合は、異常ではあるが正当な運転条件下で不要なトリップのリスクがあることを示唆しています。テストは、理想的な実験室条件ではなく、現実的な条件—全負荷、通常の周囲温度、および一般的な電源電圧—下で行う必要があります。.
比較表:用途別設定
| アプリケーションの種類 | 標準的な負荷電流 | 推奨MCCBサイズ | 瞬時整定 | ピーク突入電流 | 安全マージン |
|---|---|---|---|---|---|
| LED照明のみ | 80A | 100A | 瞬時トリップ設定:10In(1,000A) | ~120A | 8.3× |
| オフィスコンセント | 45A | 50A | 10In (500A) | ~90A | 5.6× |
| 37kWモータDOL始動 | 70A | 100A | 12In (1,200A) | ~750A | 1.6× |
| 75kWモータDOL始動 | 140A | 160A | 12In (1,920A) | ~1,500A | 1.3× |
| 混合(照明+小型モータ) | 42A | 50A | 10In (500A) | ~100A | 5.0× |
| 変圧器一次側 (75kVA) | 110A | 125A | 10In (1,250A) | ~600A | 2.1× |
| 溶接機器 | 60A | 100A | 12In (1,200A) | ~900A | 1.3× |
| データセンターPDU | 200A | 250A | 10In (2,500A) | ~400A | 6.3× |
| HVACパッケージユニット | 85A | 100A | 12In (1,200A) | ~850A | 1.4× |
| 業務用厨房 | 95A | 125A | 10In (1,250A) | ~150A | 8.3× |
この表は、負荷特性に基づいて安全マージンがどのように大きく異なるかを示しています。抵抗負荷および電子負荷は5~8倍のマージンを達成しますが、モータ負荷は1.3~2.0倍のより厳しいマージンで動作します。どちらのシナリオも適切に適用すれば十分な保護を提供しますが、モータアプリケーションでは、計算または測定におけるエラーの余地が少なくなります。.
最新の保護システムとの統合
現代の電気設備では、単純な過電流保護を超えた協調保護方式の採用が増えています。地絡保護、アーク故障検出、および電力品質監視は、従来の熱磁気保護と統合され、包括的な安全システムを構築します。瞬時トリップ整定は、これらの協調方式において重要な役割を果たします。.
地絡保護 通常、瞬時過電流保護よりもはるかに低い電流閾値で動作します。多くの場合、人身保護には30~300mA、機器保護には100~1,000mAです。これらのシステムは、地絡が適切な保護デバイスを介して確実に遮断されるように、瞬時整定と連携する必要があります。適切に連携されていないシステムでは、地絡リレーを介して遮断されるはずの地絡で瞬時要素がトリップし、不要な停電範囲が発生する可能性があります。.
アーク故障保護は、異なる課題を提示します。. アーク故障検出デバイス(AFDD) 直列および並列アーク故障の特性的な電流および電圧の兆候を感知します。これらのデバイスは、熱要素と瞬時要素の両方と連携して、誤トリップを防止しながら、真のアーク故障が優先的に遮断されるようにする必要があります。瞬時整定はこの連携に影響を与えます。設定が高すぎると、アーク故障が瞬時閾値に達するまで長く持続する可能性があり、設定が低すぎると、AFDD識別アルゴリズムを妨げる可能性があります。.
最新の電子式トリップユニットは、ゾーン選択インターロックを含む高度な連携機能を提供します。これは、ブレーカー間の通信を使用して、時間電流曲線が重なっていても選択的な連携を実現します。これらのシステムは、下流のデバイスがゾーン内で故障を検出した場合、上流のデバイスでの瞬時トリップを一時的に禁止する場合があります。瞬時整定がこれらの高度な機能とどのように相互作用するかを理解することで、最適なシステムパフォーマンスが保証され、故障状態での予期しない動作が防止されます。.
FAQセクション
Q:ブレーカーを大幅にサイズアップした場合、モータに10Inの設定を使用できますか?
A:より低い瞬時倍率を使用するためにブレーカーフレームをサイズアップすることは、一般的に逆効果です。10In(1,500A)の150Aブレーカーが70Aモータの突入電流に対応できるかもしれませんが、熱要素がモータの実際の電流と一致しなくなり、不十分な過負荷保護を提供します。適切なアプローチは、適切なサイズのブレーカー(70Aモータの場合は100A)を適切な瞬時整定(12In)で使用し、モータスタータの熱過負荷リレーを介して個別の過負荷保護に依存することです。.
Q:ソフトスタータとVFDは、瞬時トリップの選択にどのように影響しますか?
A:ソフトスタータと可変周波数ドライブは、モータの始動突入電流を大幅に低減または排除し、通常、始動電流を1.5~3×FLAに制限します。これにより、大型モータでも10Inの瞬時整定を使用できます。ただし、始動時および故障時の最大出力電流については、ドライブメーカーの仕様を確認してください。一部のドライブは、出力短絡時に高い瞬時電流を生成する可能性があり、連携を考慮する必要がある場合があります。.
Q:計算された突入電流が瞬時閾値と一致する場合はどうすればよいですか?
A:不十分なマージンは、公差の積み重ね、電圧変動、および経年劣化の影響により、誤トリップを招きます。推奨される最小マージンは、ピーク突入電流より20%上です。計算で1,000Aの突入電流が表示され、公称1,000Aでトリップする10Inの設定を検討している場合、誤トリップのリスクが高くなります。次のより高い倍率(12In)を選択するか、代替の始動方法で突入電流を減らしてください。.
Q:電子式トリップユニットは、熱磁気式ユニットよりも細かい瞬時調整を提供しますか?
A:はい。電子式トリップユニットは通常、広い範囲(多くの場合2In~15In)で0.5Inまたは1In刻みで瞬時調整を提供しますが、熱磁気式ユニットは通常、固定設定または制限された調整(通常は10Inまたは12In)を提供します。この柔軟性により、電子式ユニットは、正確な連携または異常な負荷特性を必要とするアプリケーションに適しています。ただし、電子式ユニットは大幅にコストが高くなり、単純なアプリケーションでは正当化されない場合があります。.
Q:瞬時整定は、アークフラッシュインシデントエネルギーにどのように影響しますか?
A:瞬時整定を低くすると、故障遮断時間が短縮され、アークフラッシュインシデントエネルギーが直接削減されます。この関係はE = P × tに従います。ここで、エネルギーは電力に時間を掛けたものです。遮断時間を0.02秒(12In)から0.015秒(10In)に短縮すると、インシデントエネルギーが25%削減されます。ただし、この利点は、瞬時閾値を超える故障にのみ適用されます。包括的な アークフラッシュ低減, のためには、瞬時整定の最適化だけに頼るのではなく、メンテナンスモード、ゾーン選択インターロック、またはアークフラッシュリレーを検討してください。.
Q:瞬時整定は現場で調整できますか、それとも購入時に指定する必要がありますか?
A:熱磁気式MCCBは通常、製造時に決定された固定の瞬時整定を持っていますが、一部のモデルでは、機械式ダイヤルまたはスイッチを介して制限された現場調整が可能です。電子式トリップユニットは、デジタルインターフェースまたはDIPスイッチを介して、現場で調整可能な瞬時整定を普遍的に提供します。現場での調整が必要な場合は、購入前に必ず調整機能を確認してください。すべての現場調整を文書化し、変更後に連携を確認してください。.
結論
10Inと12Inの瞬時トリップ整定の選択は、安全性と運用信頼性の両方に影響を与える基本的な保護エンジニアリングの決定を表します。簡単なルール(配電負荷には10In、モータ負荷には12In)は、信頼できる出発点を提供しますが、最適な保護には、これらの推奨事項の根底にある技術的原則を理解する必要があります。突入電流が最小限の抵抗負荷および電子負荷は、故障遮断と連携を強化する積極的な10In設定を可能にします。大きな始動電流を必要とするモータ負荷は、堅牢な短絡保護を維持しながら、誤トリップを防止する12In設定を必要とします。.
選択プロセスでは、正確な負荷特性評価、現実的な突入電流計算、および適切な安全マージンの検証が必要です。MCCBとMCBの混同、過度に保守的な設定、および周囲温度の影響の無視などの一般的な間違いは、保護効果を損なう可能性があります。統合された地絡、アーク故障、および通信ベースの連携を備えた最新の設備では、瞬時整定がこれらの高度な保護機能とどのように相互作用するかをさらに考慮する必要があります。.
適切な瞬時トリップ選択は、誤トリップと真の故障に対する不適切な応答という、不満のたまるサイクルを排除します。これにより、モータが確実に始動し、配電回路が積極的に保護され、電気システム全体の選択的な連携の基礎が構築されます。適切なブレーカーサイズ、熱要素の選択、およびシステムレベルの連携調査と組み合わせることで、正しい瞬時トリップ設定は、最新の電気設備が要求する信頼性の高い保護を提供します。複雑なアプリケーションまたは重要な連携要件を持つシステムの場合は、メーカーのアプリケーションガイドを参照し、詳細な時間電流連携調査を通じて選択を確認するために、保護エンジニアリングの専門家を雇うことを検討してください。.
関連記事
- モールドケース遮断器(MCCB)とは
- トリップカーブを理解する
- MCCB vs MCB:完全な比較ガイド
- 回路ブレーカーの定格:Icu、Ics、Icw、Icmの説明
- モータ回路保護装置と熱磁気ブレーカー
- スターデルタスタータの配線とサイジングガイド
- 電気的ディレーティング:温度、高度、およびグループ化係数
VIOX Electricは、産業および商業用途向けの高品質なMCCB、MCB、および電気保護デバイスの製造を専門としています。当社の技術チームは、最適な保護システム設計を保証するために、アプリケーションサポートと協調検討を提供します。製品仕様、カスタムソリューション、または技術相談については、お問い合わせください。.
