

モーター保護において加熱方式が重要な理由
適切な熱過負荷リレーを選択するには、加熱素子の技術とリセット機構という2つの重要な要素を理解する必要があります。加熱方式は応答の精度と熱メモリ特性を決定し、リセットモードはメンテナンス要件と動作の安全に影響を与えます。三相モーターのアプリケーションでは、手動リセット付きのバイメタルリレーが標準的な産業用負荷に対して最も信頼性の高い保護を提供し、共晶合金タイプは一貫したトリップポイントを必要とする高精度アプリケーションに優れています。このガイドでは、リレーの特性をモーター保護の要件に適合させるために、両方の要素を検討します。.
要点
- バイメタルリレー 段階的で予測可能なトリップのために、差動熱膨張を利用します。これは、産業用モーターアプリケーションの90%に最適です。
- 共晶合金リレー 相変化技術により、正確で再現性のあるトリップポイントを提供しますが、手動リセットのみが必要です。
- 手動リセット オペレーターに再起動前に調査を強制し、未解決の障害による繰り返しの損傷を防ぎます。
- 自動リセット リモート操作を可能にしますが、過負荷の原因が解消されない場合、機器の損傷のリスクがあります。
- トリップクラスの選択 (10/20/30) は、モーターの熱容量と始動特性に合わせる必要があります。
- 周囲温度補償 屋外設置および温度変化のある環境に不可欠です。
熱過負荷リレーの加熱技術の理解
バイメタルサーマル過負荷リレー
バイメタル式熱過負荷リレーは、産業用アプリケーションで最も広く展開されているモーター保護技術です。これらのデバイスは、2つの異なる金属(通常は鋼と銅ニッケルまたはニッケルクロム合金の組み合わせ)を利用して、複合ストリップを形成します。各金属は異なる熱膨張係数を示し、モーター電流が隣接するヒーター素子を流れることによって加熱されると、ストリップが予測どおりに曲がります。.
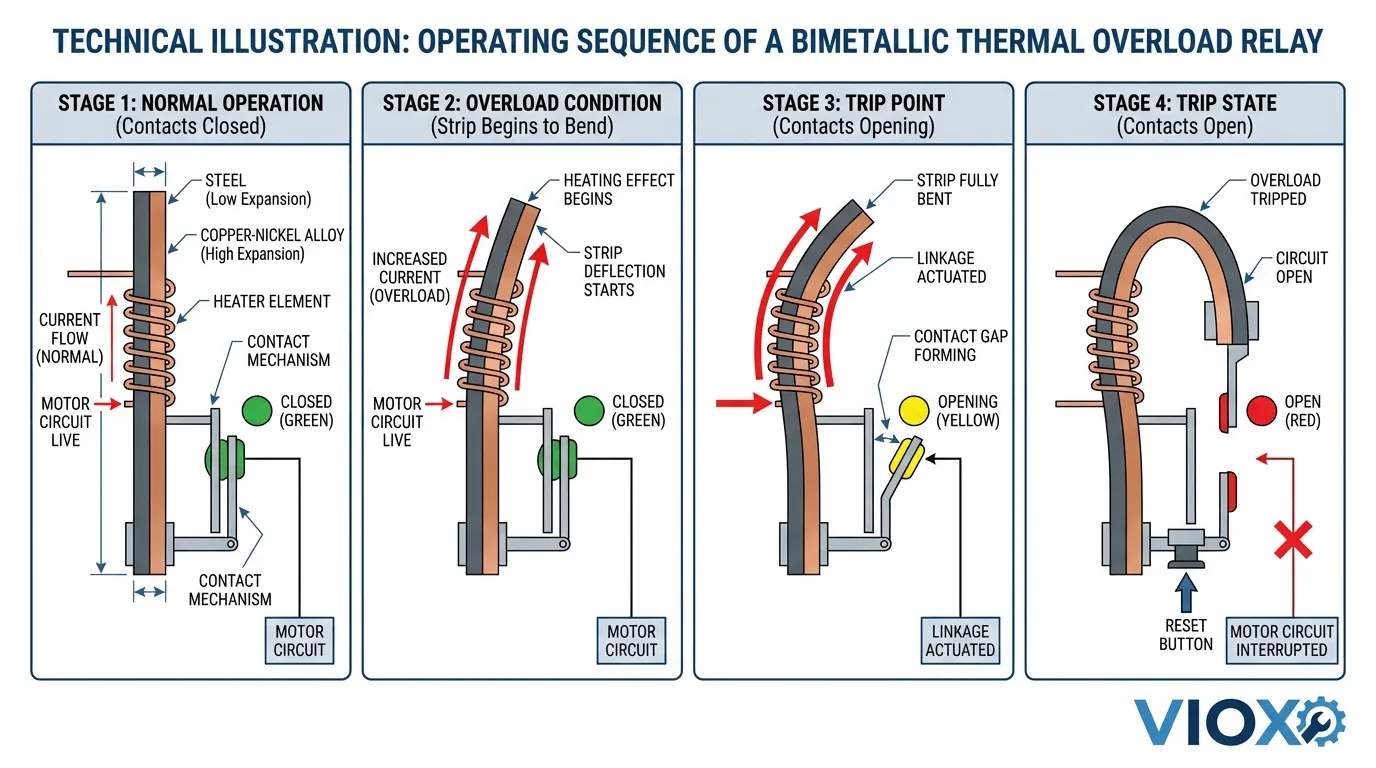
動作原理:モーター回路を流れる電流は、バイメタルストリップの近くに配置された較正済みのヒーターコイルにも流れます。モーター負荷が増加すると、ヒーターの温度が比例して上昇し、2つの金属層間で差動膨張が発生します。ストリップは、膨張係数の低い金属に向かって曲がり、最終的に制御回路の接点を開く機械的なトリップ機構を作動させます。.
熱メモリの利点:バイメタルリレーは、固有の熱メモリを備えています。以前の過負荷イベントからの蓄積された熱を保持します。この特性は、モーターが繰り返しの始動-停止サイクルまたは断続的な過負荷を経験する場合に、優れた保護を提供します。リレーは熱ストレスを「記憶」し、その後のイベントでより速くトリップします。ストリップが元の形状に戻るまでに必要な冷却期間は、即時の再起動を防ぎ、モーターが安全に熱を放散できるようにします。.
主な用途:
- 汎用三相モーター保護(1〜800 HP範囲)
- 頻繁な始動および可変負荷を伴うアプリケーション
- 周囲温度補償が必要な環境
- 自動リセット機能が望ましい後付け設置
利点:
- ほとんどのアプリケーションでコスト効率に優れています
- 手動および自動リセット構成の両方で利用可能
- 段階的なトリップ特性により、モーター起動中の不要なトリップを低減
- 長年のフィールドパフォーマンスデータによる実績のある信頼性
制限事項:
- 周囲温度の変化によってトリップポイントの精度が影響を受ける(通常±10〜15%)
- 時間の経過に伴う機械的な摩耗がキャリブレーションに影響を与える可能性があります
- 重大な過負荷に対する電子リレーと比較して応答が遅い
共晶合金熱過負荷リレー
共晶合金過負荷リレーは、相変化熱力学に基づく根本的に異なる保護メカニズムを採用しています。これらのデバイスには、正確に配合されたスズ-鉛はんだ合金がチューブアセンブリ内に密閉されています。合金組成は、モーターの熱損傷閾値に対応する特定の温度で溶融するように設計されています。.
動作原理:モーター電流は、共晶合金チューブの周りに巻き付けられたヒーター巻線を流れます。通常の動作条件下では、固体の合金がバネ仕掛けのラチェットホイールを機械的に拘束します。持続的な過電流によりヒーターが合金の融点(標準的なスズ-鉛共晶の場合は通常183°C)に達すると、材料は急速に液化します。この相変化によりラチェット機構が解放され、バネの張力で回転して制御回路の接点が開きます。.
正確なトリップ特性:共晶合金のシャープな融点は、バイメタル設計と比較して、優れたトリップ再現性(±2〜3%の変動)を提供します。この精度により、共晶リレーは、密閉型コンプレッサーモーターや精密機械ドライブなど、一貫した保護閾値が重要なアプリケーションに最適な選択肢となります。.
リセット要件:共晶リレーは手動リセットを義務付けています。合金が冷却されて再固化するまでラチェット機構を手動で再エンゲージできないため、自動リセットは物理的に不可能です。この強制的な介入により、オペレーターは機器を再起動する前に過負荷の原因を調査することが保証されます。.
主な用途:
- NEMA定格のモータースターター(サイズ1〜6)
- 密閉型冷凍コンプレッサーの保護
- 正確なトリップポイントを必要とする重要なプロセスモーター
- 手動リセット検証が必須のアプリケーション
利点:
- 優れたトリップポイントの精度と再現性
- 機械的な振動の影響を受けない
- 優れた長期キャリブレーション安定性
- 固有の手動リセットにより安全検証を提供
制限事項:
- 手動リセットのみ—リモート再起動機能はありません
- バイメタルタイプと比較して初期コストが高い
- リセット前に必要な冷却期間が長い(通常5〜15分)
- 小型モーター定格での入手可能性が限られている
比較分析:バイメタル技術と共晶技術
| 特徴 | バイメタルリレー | 共晶合金リレー |
|---|---|---|
| トリップ機構 | 差動熱膨張 | 相変化液化 |
| トリップ精度 | ±10〜15%(温度依存) | ±2〜3%(高い再現性) |
| リセットオプション | 手動または自動 | マニュアルのみ |
| 熱メモリ | 優秀(段階的な冷却) | 中程度(バイナリの固体/液体状態) |
| 応答速度 | 段階的(クラス10/20/30選択可能) | トリップポイントで急速 |
| Ambient Compensation | プレミアムモデルで利用可能 | 固定融点に起因する固有の特性 |
| 一般的なコスト | より低い | 20~40%高い |
| メンテナンス | 定期的な校正を推奨 | 最小限—本質的に安定 |
| 最適なアプリケーション | 一般的な産業用モーター、変動負荷 | 精密用途、密閉型モーター |
リセットモード選択:手動 vs. 自動
リセット機構は、トリップイベント後に熱過負荷リレーがどのように通常動作に戻るかを決定します。この選択は、運転の安全性、メンテナンス要件、およびシステム自動化機能に大きく影響します。.
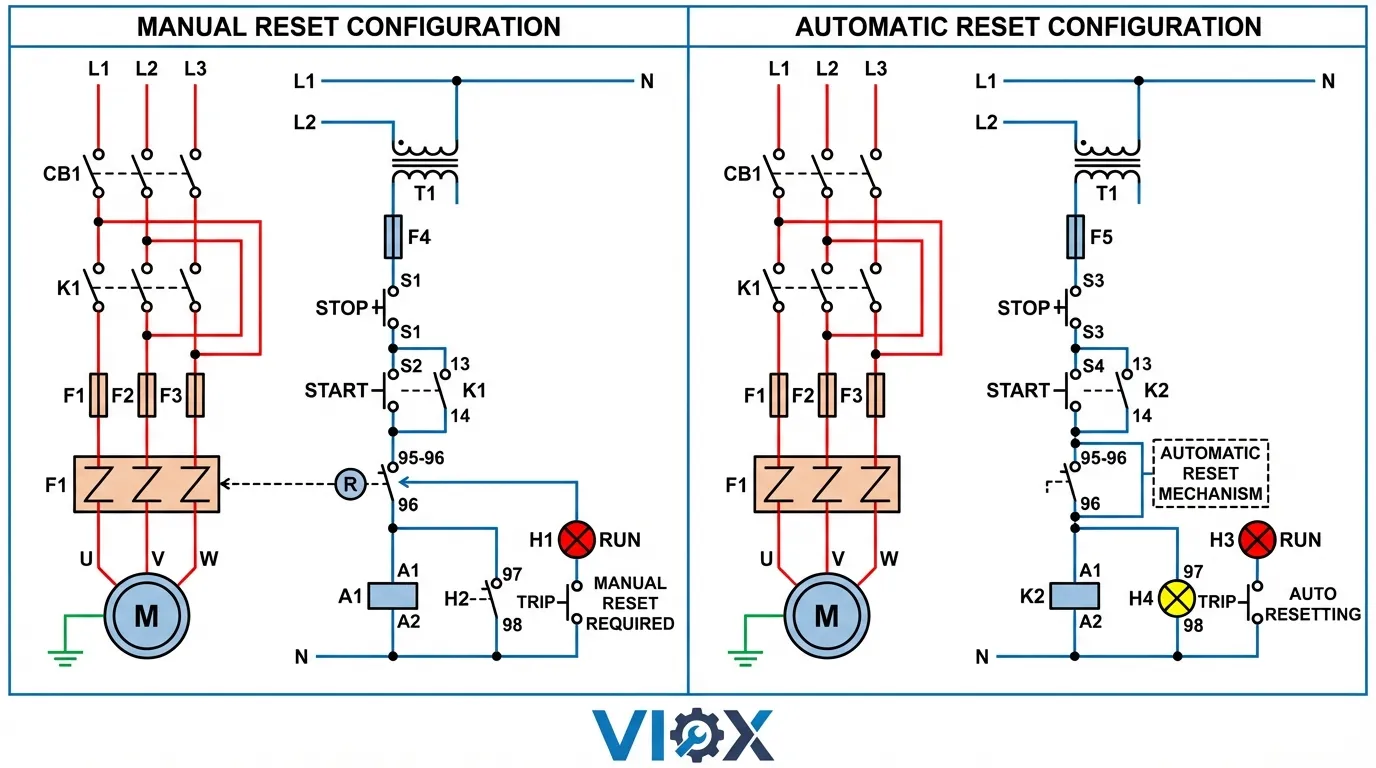
手動リセット構成
手動リセットリレーは、トリップ後に回路を復旧させるために、オペレーターによる物理的な介入が必要です。リレーハウジングのリセットボタンまたはレバーを押すか回転させて、接点機構を機械的に再係合する必要があります。この設計により、機器の再起動前に必須の調査期間が設けられます。.
安全上の利点:手動リセットは、重要な安全チェックポイントを提供します。モーターが過負荷でトリップした場合、強制的な手動介入により、以下が保証されます。
- オペレーターは、モーターと駆動機器の機械的な故障を物理的に検査する
- 過負荷の原因(ベアリングの詰まり、過剰な負荷、位相不平衡)が特定され、修正される
- 再起動を試みる前に、冷却時間が十分に確保される
- メンテナンスの傾向分析のために、トリップイベントのドキュメント化が行われる
理想的なアプリケーション:
- 無人での再起動が危険をもたらす重要な安全システム
- 予期しない再起動によって損傷を受ける可能性のある機器を駆動するモーター(コンベヤー、ミキサー、クラッシャー)
- リモート監視機能が限られている設備
- OSHAのロックアウト/タグアウト要件の対象となるアプリケーション
- 再起動前に冷却確認が必要な密閉型コンプレッサー
制限事項:
- リレーの場所にローカルアクセスが必要
- リモートまたはアクセスが困難な設備でのダウンタイムが増加
- 無人運転を必要とする完全自動化プロセスには不向き
- 24時間365日の運用には追加の人員が必要になる場合がある
自動リセット構成
自動リセットリレーは、熱素子がリセット閾値以下に冷却されると自動的に復旧します。接点機構はオペレーターの介入なしに再係合し、制御電源が復旧するとモーター始動機が再通電されます。.
運用上の利点:自動リセットにより、以下が可能になります。
- PLCまたはSCADA制御によるリモートシステム再起動
- 一時的な過負荷イベントによるダウンタイムの短縮
- リモート設備での無人運転(ポンプ場、HVACシステム)
- ビルディングオートメーションシステムとの統合の簡素化
重要な考慮事項:
- 繰り返しの再起動サイクル:過負荷の原因が解消されない場合、自動リセットによりモーターが繰り返し起動し、巻線が熱損傷限界を超えて急速に過熱する可能性があります。
- 予期しない機器の動作:自動再起動は、機械の近くで作業している人が機械が停止していると想定している場合、危険を引き起こす可能性があります。
- 隠蔽された故障モード:一時的なトリップは、オペレーターが気付く前にリセットされる可能性があり、発生しつつある機械的または電気的な問題を隠蔽する可能性があります。
- コンプレッサーの損傷リスク:冷凍システムは、冷媒圧力が均等になる前に再起動する可能性があり、コンプレッサーの故障を引き起こす可能性があります。
リセットモード選択マトリックス
| アプリケーションの種類 | 推奨されるリセットモード | 正当化 |
|---|---|---|
| コンベアシステム | マニュアル | 詰まった材料や機器の近くに人がいる状態での再起動を防止 |
| 水中ポンプ(リモート) | 自動 | リモート再起動を有効にする。繰り返しのトリップについてはSCADAで監視 |
| 工作機械の駆動装置 | マニュアル | 機械的な拘束または工具の破損の調査を保証 |
| HVACエアハンドラー | 自動 | 一時的な過負荷が一般的。ビルディングオートメーションとの統合が必要 |
| 密閉型コンプレッサー | マニュアル | 必須の冷却期間。短サイクル損傷を防止 |
| 灌漑ポンプ | 自動 | リモートロケーション。起動時の許容可能な一時的な過負荷 |
| ミキサー/アジテーター駆動装置 | マニュアル | 固化した材料または機械的故障による再起動を防止 |
| パッケージ化された屋上ユニット | 自動 | 統合された制御。BMSによるリモート監視 |
モーター熱保護のためのトリップクラスの選択
トリップクラスは、熱過負荷リレーが回路を遮断する前に許容する持続的な過電流の最大時間を定義します。IEC 60947-4-1およびUL規格で定義されているこの標準化された分類により、リレーの応答特性がモーターの熱容量および始動プロファイルと一致することが保証されます。.
トリップクラス規格の理解
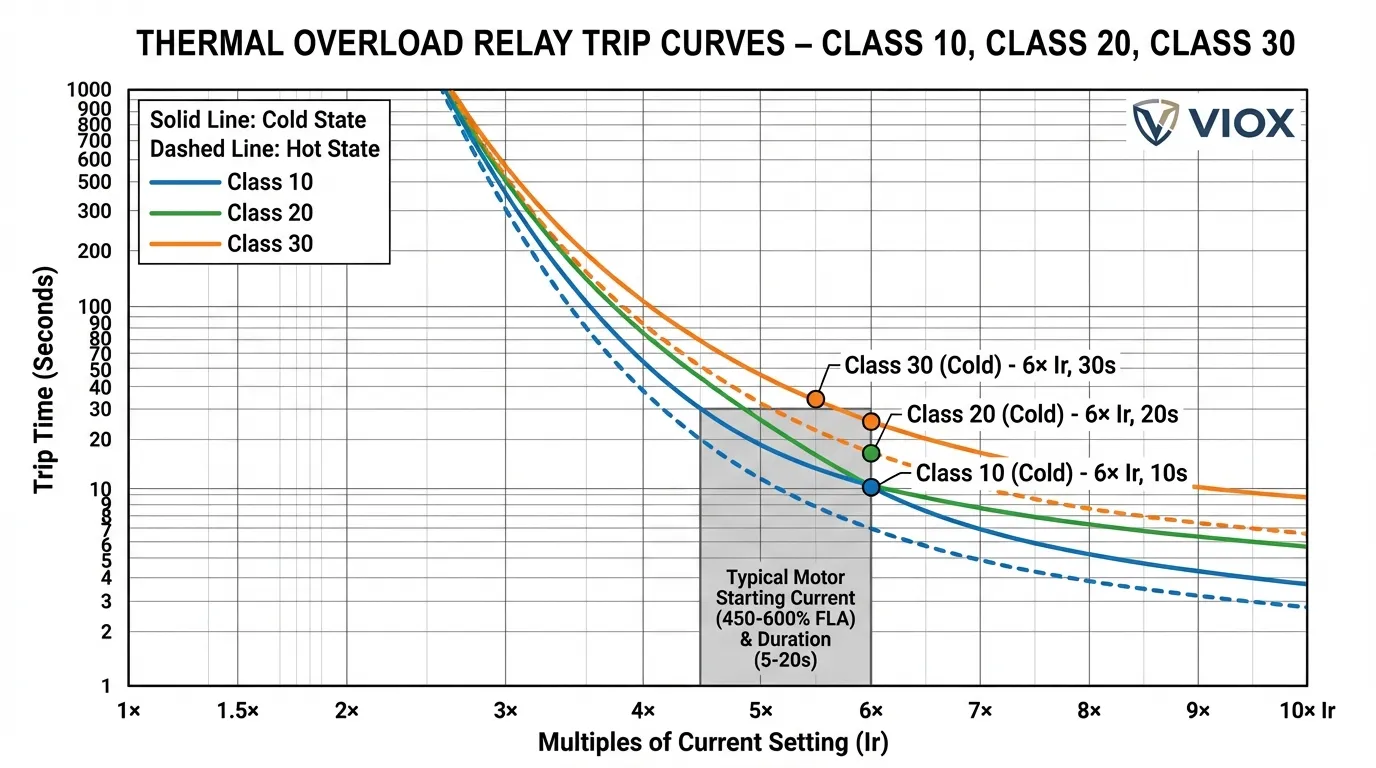
トリップクラスは、リレーがコールドスタートから電流設定の600%を流した場合の最大トリップ時間を秒単位で表す数値(5、10、20、または30)として表されます。この標準化されたテスト条件は、メーカー間でリレー応答を比較するための整合性のある基準を提供します。.
| トリップクラス | 600%電流におけるトリップ時間 | 代表的な用途 |
|---|---|---|
| クラス5 | 最大5秒 | 水中ポンプ、密閉型コンプレッサー(熱容量が小さい) |
| クラス10 | 最大10秒 | IECモーター、急速始動アプリケーション、人工冷却モーター |
| クラス20 | 最大20秒 | NEMA設計Bモーター、一般的な産業用アプリケーション(最も一般的) |
| クラス30 | 最大30秒 | 高慣性負荷、ミル用モーター、加速時間が長い |
冷態時と熱態時のトリップ曲線
熱過負荷リレーは、初期の熱状態に応じて応答特性が大きく異なります。
冷態時動作:モーターが十分な冷却時間(通常、周囲温度で2時間以上)の後に始動する場合、熱素子は室温から始まります。リレーが熱を蓄積してトリップ閾値に達するまでに最大時間が必要です。公開されているトリップ曲線は、通常、冷態時の性能を表しています。.
熱態時動作:頻繁にサイクルするモーター、または停止直後に再始動するモーターは、熱素子の温度が高い状態で始まります。熱態時のトリップ曲線は、リレーがトリップ閾値に近い状態から始まるため、応答時間が20〜30%速くなります。この加速された応答は、適切な冷却期間なしに繰り返しの過負荷イベントが発生しているモーターに重要な保護を提供します。.
実用的な意味合い:
- 頻繁な起動-停止アプリケーションでは、誤トリップを避けるために熱態時の曲線を考慮する必要があります。
- デューティサイクルが60%を超えるモーターは、主に熱態時条件で動作します。
- 温度補償リレーは、周囲温度に基づいてトリップ特性を調整し、一貫した保護を維持します。
アプリケーション固有のトリップクラスの選択
クラス10の選択基準:
- 熱容量が限られているモーター(水中ポンプ、直結設計)
- 加速が3〜5秒以内に完了する急速始動アプリケーション
- より高速な保護応答のために設計されたIEC定格モーター
- ロックローター状態中にモーターの損傷が急速に発生するアプリケーション
例:クラスB絶縁の15 HP水中井戸ポンプモーターは、50°Fの水中に水没して動作します。外部冷却により、通常の始動中に誤トリップすることなく、アグレッシブなクラス10保護が可能になり、ポンプが空運転になったり、機械的な拘束が発生した場合に迅速な応答を提供します。.
クラス20の選択基準 (最も一般的):
- 標準的な熱容量を備えたNEMA設計Bモーター
- 5〜10秒の加速時間を伴う一般的な産業用アプリケーション
- 中程度の始動トルク要件を備えた負荷
- 時折の過渡的な過負荷が許容されるアプリケーション
例:HVACシステムの遠心ファンを駆動する50 HPモーターは、450%の始動電流で5〜7秒の加速を経験します。クラス20保護は、通常の始動に対応しながら、ファンが機械的に拘束されたり、ベアリングの故障が発生した場合に20秒以内にトリップします。.
クラス30の選択基準:
- 拡張された加速(15〜25秒)を必要とする高慣性負荷
- 強化された熱容量を備えたミル用または過酷な用途のモーター
- 高いブレークアウェイトルクを伴うアプリケーション(クラッシャー、ボールミル、押出機)
- 始動電流が長期間にわたって500% FLAを超える負荷
例:ボールミルを駆動する200 HPモーターは、巨大な回転質量のために全速力に達するまでに18〜22秒かかります。ミルの充填重量により、加速全体で550%の始動電流が発生します。クラス30保護は、通常の始動中の誤トリップを防ぎながら、ロックローターまたは機械的なジャム状態から保護します。.
一般的なトリップクラスの選択エラー
誤トリップ回避のための過剰なサイジング:誤トリップが発生している標準モーターにクラス30保護を選択すると、根本原因に対処するのではなく、(機械的な拘束、電圧の問題、不適切なリレーサイジング)などの根本的な問題が隠蔽されます。この慣行は、真の過負荷イベント中にモーターを熱損傷にさらします。.
「より良い保護」のための過小なサイジング“:高慣性負荷にクラス10リレーを指定すると、通常の加速中に繰り返しの誤トリップが発生します。これにより、オペレーターが保護システムを無効にしたり、リレー設定を過剰にサイジングしたりすることになり、どちらの慣行も効果的なモーター保護を排除します。.
熱態時曲線の無視:頻繁なサイクルを伴うアプリケーションでは、熱態時のトリップ特性を評価する必要があります。コールドスタートが正常に完了したモーターでも、熱素子の蓄積された熱により、数回の急速なサイクル後に誤トリップが発生する可能性があります。.
周囲温度補償
熱過負荷リレーは、IEC規格に従って、40°C(104°F)の周囲温度で最適な性能を発揮するように校正されています。この基準点からの大幅な逸脱は、トリップの精度と応答時間に影響を与え、モーター保護を損なったり、誤トリップを引き起こしたりする可能性があります。.
リレー性能に対する温度の影響
高い周囲温度 (> 40°C):
- 熱素子がトリップ閾値に近い状態から始まります
- 50°Cの周囲温度でトリップ時間が10〜20%短縮されます
- 通常のモーター動作中に誤トリップするリスク
- 有効電流設定が低下します(リレーはより低い実際の電流でトリップします)
低い周囲温度 (<20°C):
- 熱素子がトリップするには、より多くの熱蓄積が必要です
- 0°Cの周囲温度でトリップ時間が15〜25%増加します
- 真の過負荷時に不適切なモーター保護のリスク
- 有効電流設定が増加します(モーターの損傷が発生するまでリレーがトリップしない可能性があります)
補償技術
バイメタル補償:プレミアムバイメタルリレーには、周囲温度の影響を打ち消す追加の補償バイメタル素子が組み込まれています。これらの素子は、周囲温度に基づいてトリップ機構の位置を調整し、-25°C〜+ 60°Cの動作範囲全体で一貫したトリップ特性を維持します。.
電子的な温度検知:最新の電子式過負荷継電器は、サーミスタまたは測温抵抗体(RTD)センサーを使用して周囲温度を測定し、アルゴリズムによってトリップ閾値を調整します。このアクティブな補償により、広い温度範囲にわたって±3%の精度が提供され、モーターの熱モデリングなどの高度な機能が可能になります。.
アプリケーションガイドライン
屋外設置:屋外エンクロージャー内のモーターは、気候や太陽光負荷に応じて-20℃から+50℃の範囲の周囲温度を経験します。季節変動にわたって一貫した保護を提供するには、温度補償された継電器が必須です。.
高温環境:鋳造工場、製鉄所、その他の高温産業環境では、電流設定の適切なディレーティングまたは高温モデルの選択により、60℃の周囲温度での連続運転に定格された継電器が必要です。.
冷蔵保管アプリケーション:-20℃から0℃で動作する冷蔵倉庫および冷蔵保管施設では、モーターの過負荷時にトリップの遅延を防ぐために、低温定格の継電器と補償が必要です。.
実用的な選択ワークフロー
ステップ1:モーターの熱特性を決定する
次のモーター銘板およびアプリケーションデータを収集します。
- モーター銘板からの全負荷電流(FLA)
- サービスファクター(SF)—通常、産業用モーターの場合は1.0または1.15
- 熱容量を示す絶縁クラス(B、F、またはH)
- デューティサイクルと1時間あたりの予想起動回数
- 全負荷条件下の加速時間
ステップ2:加熱技術を選択する
バイメタルを選択する場合:
- 一般的な産業用モーター保護(1-800 HP)
- リモート操作に必要な自動リセット機能
- 予算の制約により初期コストは低くなる
- アプリケーションには、可変負荷または頻繁なサイクルが含まれます
共晶合金を選択する場合:
- 正確で再現性のあるトリップポイントが必要
- NEMA定格のスターター統合(サイズ1-6)
- 密閉型コンプレッサーまたは重要なプロセスモーター
- 安全コンプライアンスのために手動リセット検証が必須
ステップ3:トリップクラスを決定する
クラス10を選択する場合:
- モーターの加速時間<5秒
- IEC定格のモーターまたは水中ポンプアプリケーション
- モーターの熱容量が限られているため、迅速な保護が必要
- 低慣性負荷でのクイックスタートアプリケーション
クラス20を選択する場合 (デフォルトの選択):
- 標準的な熱容量を備えたNEMA設計Bモーター
- 加速時間5〜10秒
- 特別な要件のない一般的な産業用アプリケーション
- モーターメーカーが代替クラスを指定していない
クラス30を選択する場合:
- 加速時間>15秒の高慣性負荷
- ミルデューティまたは過酷なデューティモーター定格
- モーターメーカーが特にクラス30を推奨
- 通常の起動中にクラス20で文書化された迷惑トリップ
ステップ4:リセットモードを選択する
手動リセットを選択する場合:
- 安全規制により、再起動前にオペレーターの検証が必要
- 予期しない再起動により機器が損傷する可能性がある
- 継電器の場所にローカルアクセスできることが実用的
- アプリケーションには、ロックアウト/タグアウト手順が含まれます
自動リセットを選択する場合:
- リモートインストールには無人操作が必要
- 自動再起動に必要なSCADAまたはBMS統合
- 一時的な過負荷が予想され、許容される
- 包括的なリモート監視およびアラームが実装されている
ステップ5:環境要因を考慮する
温度補償が必要な場合:
- 周囲温度が40℃の基準から>±10℃変動する
- 季節的な極端な温度にさらされる屋外設置
- 高温環境(鋳造工場、製鉄所)
- 冷蔵保管または冷蔵スペースの設置
その他の環境に関する考慮事項:
- 腐食性雰囲気には、密閉された継電器エンクロージャーが必要
- 高振動環境では、共晶合金技術が有利
- ほこりの多い条件では、NEMA 12またはIP54の最小エンクロージャー定格が必要
モーター保護システムとの統合
熱過負荷継電器は、包括的なモーター保護戦略の一部として機能します。より広範な保護アーキテクチャ内での役割を理解することで、効果的な連携が確保され、保護のギャップが防止されます。.
上位保護デバイスとの協調
回路ブレーカーの協調:上位の回路遮断器またはモータ回路保護装置(MCP)は、過負荷継電器の動作を妨げることなく、短絡保護を提供する必要があります。適切な協調により、以下が保証されます。
- 回路遮断器の瞬時トリップ設定は、モータ拘束回転子電流(通常はFLAの10〜12倍)より上に設定
- 過負荷継電器は、115〜600% FLA範囲のすべての保護を提供
- 電流範囲全体で保護範囲の重複やギャップがない
ヒューズの協調:ヒューズが短絡保護を提供する場合は、モータの始動電流を開放することなく許容する遅延特性を備えたクラスRK1またはクラスJヒューズを選択します。協調曲線は、ヒューズの最小溶断時間と過負荷継電器の最大トリップ時間との間に明確な分離を示す必要があります。.
コンタクタとの統合
熱過負荷継電器は、IEC構成ではコンタクタに直接取り付けられ、NEMAアセンブリでは個別に設置されます。過負荷継電器の補助接点は、コンタクタコイル回路と直列に接続され、過負荷トリップが発生するとコンタクタが消勢され、モータへの電力が遮断されるようにします。.
重要な配線に関する考慮事項:
- 制御回路の電圧および電流定格の過負荷継電器補助接点
- 適切な位相により、3つのすべてのモータ相が監視される(三極継電器)
- ヒータエレメントは、回路遮断器の定格ではなく、実際のモータFLAに合わせてサイズ設定
- 制御回路には、過負荷リセットステータスの表示が含まれる
コンタクタの選択とモータ制御の基礎に関する詳細なガイダンスについては、コンタクタとは何か、およびその動作方法に関する包括的なガイドを参照してください。.
高度な保護機能
最新の電子式過負荷継電器は、基本的な熱モデリングを超える強化された保護機能を提供します。
地絡保護:相間の電流不均衡を検出し、地絡状態を示します。特に、湿った環境または導電性の環境での人員の安全にとって重要です。.
欠相/不均衡保護:3つのすべての相を監視し、電圧または電流の不均衡が10〜15%を超えるとトリップします。三相モータへの単相運転による損傷を防ぎます。.
拘束回転子保護:モータが加速に失敗した場合、より高速なトリップ応答を提供し、機械的な詰まり状態での巻線損傷を防ぎます。.
モータ熱モデリング:電子式継電器は、電流履歴、デューティサイクル、および冷却時間に基づいて、累積されたモータ熱を計算します。この高度なアルゴリズムは、単純な熱要素応答と比較して、優れた保護を提供します。.
熱過負荷継電器の動作とコンポーネントの基本的な理解については、 熱過負荷継電器の基本に関する詳細な記事を参照してください。.
インストールと試運転のベストプラクティス
適切な継電器のサイズ設定と設定
電流設定手順:
- モータ銘板の全負荷電流(FLA)を確認
- 1.15サービスファクタのモータの場合:継電器をモータFLAに設定
- 1.0サービスファクタのモータの場合:継電器をモータFLAの90%に設定
- 設定が三相システムの電流不均衡を考慮していることを確認
一般的なサイズ設定エラー:
- 継電器をモータFLAではなく回路遮断器の定格に設定
- 設定計算でサービスファクタを考慮しない
- 根本原因に対処するのではなく、誤トリップを防ぐために継電器の設定を大きくする
- 三相モータアプリケーションに単相継電器の電流定格を使用する
取り付けと環境に関する考慮事項
向きの要件:ほとんどの熱過負荷継電器は、垂直取り付け位置(垂直から±30°)用に校正されています。水平取り付けは、機械的なトリップ機構に対する重力の影響により、トリップ精度が10〜15%影響を受ける可能性があります。承認された取り付け方向については、製造元の仕様を参照してください。.
エンクロージャの選択:
- 屋内、クリーンな環境:NEMA 1 / IP20最小
- 屋外またはほこりの多い場所:NEMA 3Rまたは4 / IP54またはIP65
- 腐食性雰囲気:NEMA 4Xステンレス鋼 / IP66
- 危険場所:NEC第500条に基づく防爆エンクロージャ
換気要件:熱継電器の周囲に十分な空気循環を確保します。高温環境の密閉型スタータでは、周囲温度が継電器の性能に影響を与えないように、強制換気または特大のエンクロージャが必要になる場合があります。.
テストと検証
初期試運転テスト:
- 導通テスト:手動テストボタンによる補助接点の動作を確認
- 電流設定の検証:ダイヤルまたはデジタル設定がモータFLAと一致することを確認
- トリップクラスの確認:継電器のトリップクラスがモータの要件と一致することを確認
- リセット機能テスト:手動または自動リセットが正しく動作することを確認
- 相バランスチェック:全負荷時の3つのすべての相の電流を測定
定期的なメンテナンステスト:
- 一次電流注入を使用した年間のトリップ時間検証(600% FLAテスト)
- 補助接点の接触抵抗測定
- 過熱、腐食、または機械的損傷の兆候の目視検査
- 調整可能な継電器の校正検証(製造元の仕様と比較)
ト共通の課題
迷惑なトリップ
| 症状 | 考えられる原因 | 診断手順 | 液 |
|---|---|---|---|
| モータ起動中のトリップ | アプリケーションに対してトリップクラスが速すぎる | 加速時間を測定し、リレーのトリップ曲線と比較する | より遅いトリップクラスにアップグレードする (10→20 または 20→30) |
| 数回の急速な始動後にトリップする | 始動間の冷却が不十分 | デューティサイクルを監視し、高温状態のトリップ曲線を確認する | 始動頻度を減らすか、熱メモリが優れたリレーを選択する |
| 暑い時期のみトリップする | 周囲温度補償が不十分 | トリップイベント中のエンクロージャ温度を測定する | 温度補償付きリレーを取り付けるか、換気を改善する |
| 通常負荷でランダムにトリップする | ヒーターエレメントの接続が緩んでいる | ヒーターエレメントの端子を検査し、電圧降下を測定する | 接続を締め、損傷したヒーターを交換する |
| 1相のみでトリップする | 相の不平衡または単一のヒーター故障 | 3相すべてで電流を測定する | 負荷のバランスを取り、故障したヒーターエレメントを交換する |
過負荷時にトリップしない
重大な安全上の問題:真の過負荷状態時にトリップしないリレーは、モーターを熱損傷や火災の危険にさらします。直ちに調査が必要です。.
診断手順:
- リレーの電流設定がモーターのFLA(全負荷電流)と一致していることを確認する(過大ではないこと)
- 手動テストボタンを使用してリレーのトリップ機能をテストする
- 負荷条件下で実際のモーター電流を測定する
- 測定された電流をリレーの設定およびトリップ曲線と比較する
- リレー設定の150%および200%で一次注入試験を実施する
一般的な原因:
- 不快なトリップを防ぐために、リレー設定が誤って増加された
- ヒーターエレメントが損傷しているか、間違ったサイズが取り付けられている
- 機械的なトリップ機構が固着または摩耗している
- オペレーターがトリップに気付く前に、自動リセットリレーが繰り返しリセットされる
よくある質問
Q: クラス10モーターでクラス20の熱過負荷リレーを使用できますか?
A: いいえ。モーターに必要なトリップクラスよりも遅いトリップクラスを使用すると、過負荷状態時にモーターが熱損傷を受ける可能性があります。モーターメーカーは、モーターの熱容量と冷却設計に基づいて、必要なトリップクラスを指定します。常にモーターの指定されたトリップクラス要件と一致させるか、それ以上(より速い)にしてください。正しいトリップクラスで不快なトリップが発生する場合は、より遅いリレーを選択するのではなく、根本原因(機械的な固着、電圧の問題、不適切なサイジング)を調査してください。.
Q: アプリケーションで周囲温度補償が必要かどうかをどのように判断しますか?
A: 周囲温度が40°Cの校正基準から±10°C以上変動する場合、温度補償が不可欠です。季節変動、屋外エンクロージャへの太陽光負荷、および隣接する機器からの熱を考慮して、リレーの設置場所で予想される温度範囲を計算します。補償が必要なアプリケーションには、屋外設置、高温産業環境(>50°C)、および低温貯蔵施設(<20°C)が含まれます。最新の電子過負荷リレーには、標準機能として自動温度補償が含まれています。.
Q: 熱過負荷リレーとモーター回路保護装置の違いは何ですか?
A: 熱過負荷リレーは、持続的な過電流状態(115〜600% FLA範囲)に対する時間遅延保護を提供し、モーターが正常に始動できるようにしながら、過負荷による損傷から保護します。モーター回路保護装置(MCP)は、時間遅延なしで瞬時の短絡保護(通常>10×FLA)を提供する特殊な回路ブレーカーです。完全なモーター保護には、両方のデバイスが必要です。短絡保護用のMCPと、過負荷保護用の熱過負荷リレーです。一部の最新のモーター保護回路ブレーカー(MPCB)は、両方の機能を単一のデバイスに組み合わせています。.
Q: 共晶合金熱ユニットをバイメタルエレメントと交換できますか?
A: いいえ。共晶合金リレーとバイメタルリレーは、取り付け構成、ヒーターエレメントの仕様、およびトリップ特性が異なります。リレーベースとコンタクタは、特定の熱エレメントタイプ用に設計されています。技術を混在させると、不適切な適合、誤ったトリップ特性、およびモーター保護の喪失につながります。熱エレメントを交換する場合は、必ずリレーモデルに指定された正確なメーカー部品番号を使用してください。メーカー間の相互参照には、電気的定格とトリップ曲線の慎重な検証が必要です。.
Q: 自動リセットリレーがオンとオフを繰り返すのはなぜですか?
A: 自動リセットの繰り返しサイクルは、過負荷状態が解決されていないことを示します。リレーはトリップし、冷却し、リセットしますが、モーターが過剰な電流を引き続き消費するため、すぐに再びトリップします。このサイクルは、モーター巻線を熱損傷限界を超えて急速に過熱させる可能性があります。必要な緊急措置:(1)手動リセットモードに切り替えるか、ロックアウトデバイスを取り付けて、それ以上のサイクルを防止する、(2)過負荷の原因を調査する—機械的な固着、過剰な負荷、相の不平衡、または電圧の問題を確認する、(3)負荷時の実際のモーター電流を測定し、銘板のFLAと比較する、(4)リレー設定がモーターの要件と一致していることを確認する。根本原因を特定して修正せずに、サイクルを停止するためにリレー設定を増やすことは絶対にしないでください。.
結論
適切な熱過負荷リレーを選択するには、加熱技術、リセットモード、トリップクラス、および環境要因を、特定のモーター保護要件と照らし合わせてバランスを取る必要があります。バイメタルリレーは、ほとんどの産業アプリケーションに汎用性の高い費用対効果の高い保護を提供し、共晶合金タイプは、重要なプロセスに正確なトリップ特性を提供します。手動リセットは安全検証を強制しますが、自動化を制限します。一方、自動リセットは、慎重な監視プロトコルによるリモート操作を可能にします。.
トリップクラスの選択は、不快なトリップの頻度とモーター保護の有効性に直接影響します—クラス20はNEMAモーターのデフォルトとして機能し、モーターの熱特性または負荷プロファイルがより速いまたはより遅い応答を必要とする場合にのみ、クラス10または30が指定されます。周囲温度補償は、大きな温度変動が発生する設置に不可欠になります。.
包括的なモーター保護システム設計のために、熱過負荷リレーを適切に調整された上流の短絡保護と統合し、地絡検出、相監視、または高度な熱モデリング機能を必要とするアプリケーションには、高度な電子リレーを検討してください。定期的なテストとメンテナンスにより、リレーの耐用年数全体にわたって継続的な保護の信頼性が確保されます。.
