なしで短時間遅延保護を提供する理由")

直接回答
モールドケース・サーキット・ブレーカ(MCCB) 定格短時間耐電流(Icw)を持たなくても、短時間遅延保護を提供できます。これは、IEC 60947-2のカテゴリAに属し、選択遮断は意図的な時間遅延ではなく、電流制限技術によって実現されるためです。. カテゴリBのエアサーキットブレーカ(ACB)が、高いIcw 定格を使用して故障電流を「待機」するのとは異なり、MCCBは電磁接触反発と超高速アーク遮断を使用して故障エネルギーを制限します。これにより、固有の短遅延特性(通常は10〜12×In)を介して下流デバイスと連携しながら、自身を保護します。.
要点
- ✅ カテゴリA対B:MCCB(カテゴリA)は、宣言されたIcw 定格はありませんが、接触反発閾値未満(通常は> 12〜14×In)
- ✅ )で固有の短時間耐性を持っています。電流制限の物理学n:MCCBの接点ばね圧力は、高い故障電流(> 25×I
- ✅ )で迅速な電磁反発を可能にするために意図的に低く設定されており、長時間の耐性ではなく、高速遮断によって損傷を防ぎます。短遅延の現実n, :MCCBの短遅延設定(例:10×I
- ✅ 、0.4秒)は、故障電流が瞬時トリップ閾値を下回っている場合にのみ機能します。これを超えると、磁気トリップまたはエネルギーベースのメカニズムを介して即時アクションがトリガーされます。選択遮断の制限cw = IIcu :MCCB間の完全な選択遮断には、慎重な連携表が必要です。ACBからMCCBへのカスケード接続は、ACBが真に遅延できる(I
- ✅ 機能)一方、MCCBは下流の故障を処理するため、より良い結果が得られます。安全オーバーライドn, :無効化可能な瞬時トリップを備えた高度なMCCB(例:Schneider NSX)には、「エネルギートリップ」または「瞬時オーバーライド」機能が組み込まれています。故障電流が〜25×I
を超えると、ガス作動メカニズムは設定に関係なく即時トリップを強制します。
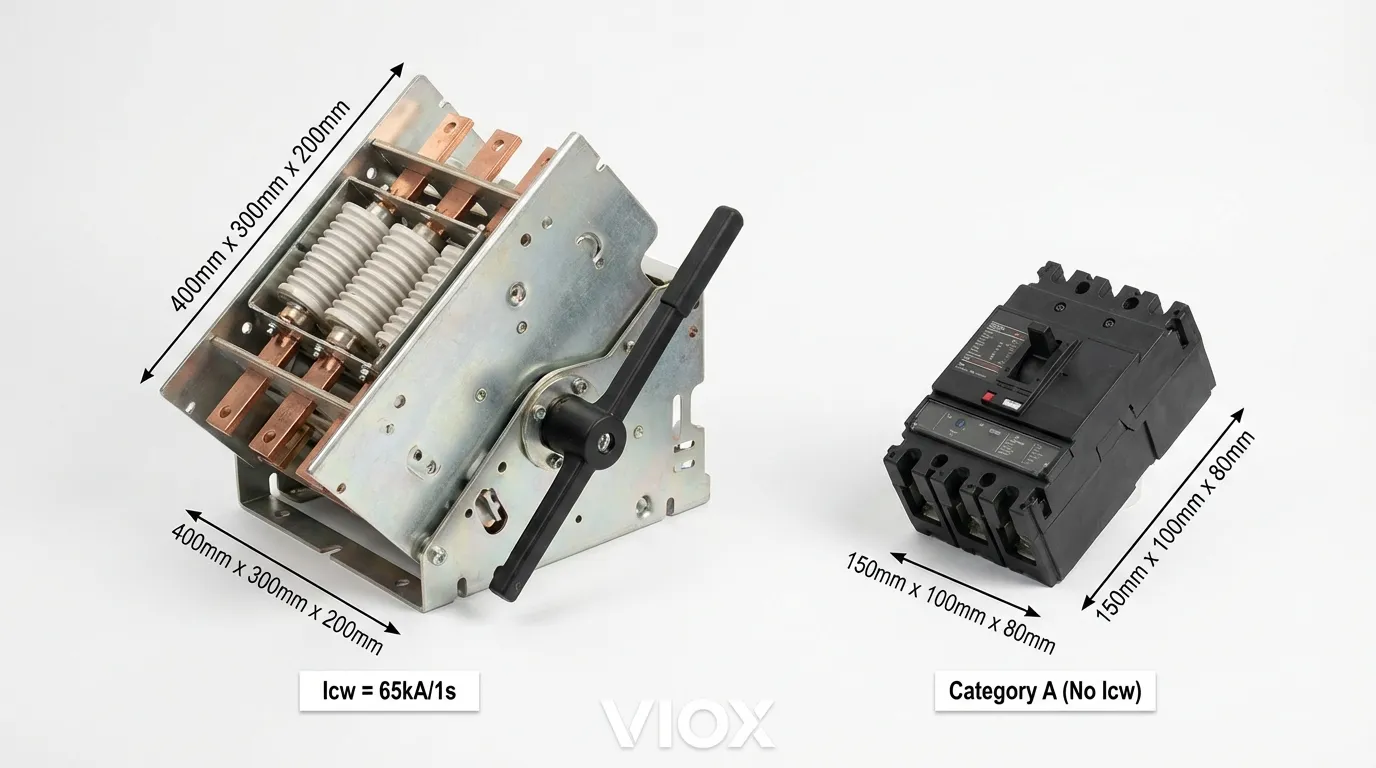
Icw定格のACBとコンパクトなMCCBカテゴリAブレーカーのサイズと構造の比較 – VIOX Electriccw
カテゴリB:宣言されたI カテゴリーB を持つACBcwエアサーキットブレーカ(ACB)は、意図的な短時間遅延によって選択遮断が実現されるアプリケーション向けに設計されています。IEC 60947-2によると、これらのデバイスは、定格短時間耐電流(I.
)を宣言する必要があります。これは、ブレーカーが損傷することなく、指定された期間(0.05秒、0.1秒、0.25秒、0.5秒、または1.0秒)閉じた状態で運ぶことができる最大故障電流です。
| パラメータ | 仕様 | 目的 |
|---|---|---|
| Icw 評価 | カテゴリBブレーカーの主な特性:n 最小12×I または5kA(≤2500Aフレーム) |
最小30kA(> 2500Aフレーム) |
| コンタクト・デザイン | 故障時の意図的な遅延を可能にします | 高いばね圧力 |
| 遅延期間中の接点反発を防ぎます | トリップ遅延性 | 瞬時トリップを無効にできます |
| 典型的なアプリケーション | 純粋な時間ベースの連携を可能にします | メインインカマー、配電フィーダー |
下流のMCCBと連携しますcw たとえば、I2= 85kA / 1sの800A ACBは、短時間遅延リレーが下流デバイスが故障を解消するのを「待機」している間、最大1秒間85kAの故障電流に耐えることができます。この機能には、堅牢な機械構造(強化された接点アーム、高い接点圧力(電磁反発を防ぐ)、およびI.
tエネルギーを吸収するための熱質量)が必要です。cw
カテゴリA:宣言されたI カテゴリーAを持たないMCCBcw モールドケースサーキットブレーカ(MCCB)は、通常、IEC 60947-2に従って「短絡条件下での選択遮断を特に意図していない」デバイスである に分類されます。これらのブレーカーは、設計思想が 長時間の故障耐性よりも迅速な故障遮断を優先するため、I.
値を宣言しません。cw:
- MCCBがIを宣言しない理由n
- 電流制限設計:故障電流が〜10〜14×I
- を超えた場合に迅速な電磁反発を容易にするために、接点ばね圧力は意図的に低く設定されています。瞬時トリップの義務2:ほとんどのMCCBは瞬時保護を無効にできません。瞬時閾値を超える故障は、即時トリップをトリガーします。
熱的制限 ない :コンパクトなモールド構造は、長時間の高電流耐性に関連する熱エネルギー(I.
t)を放散できません。
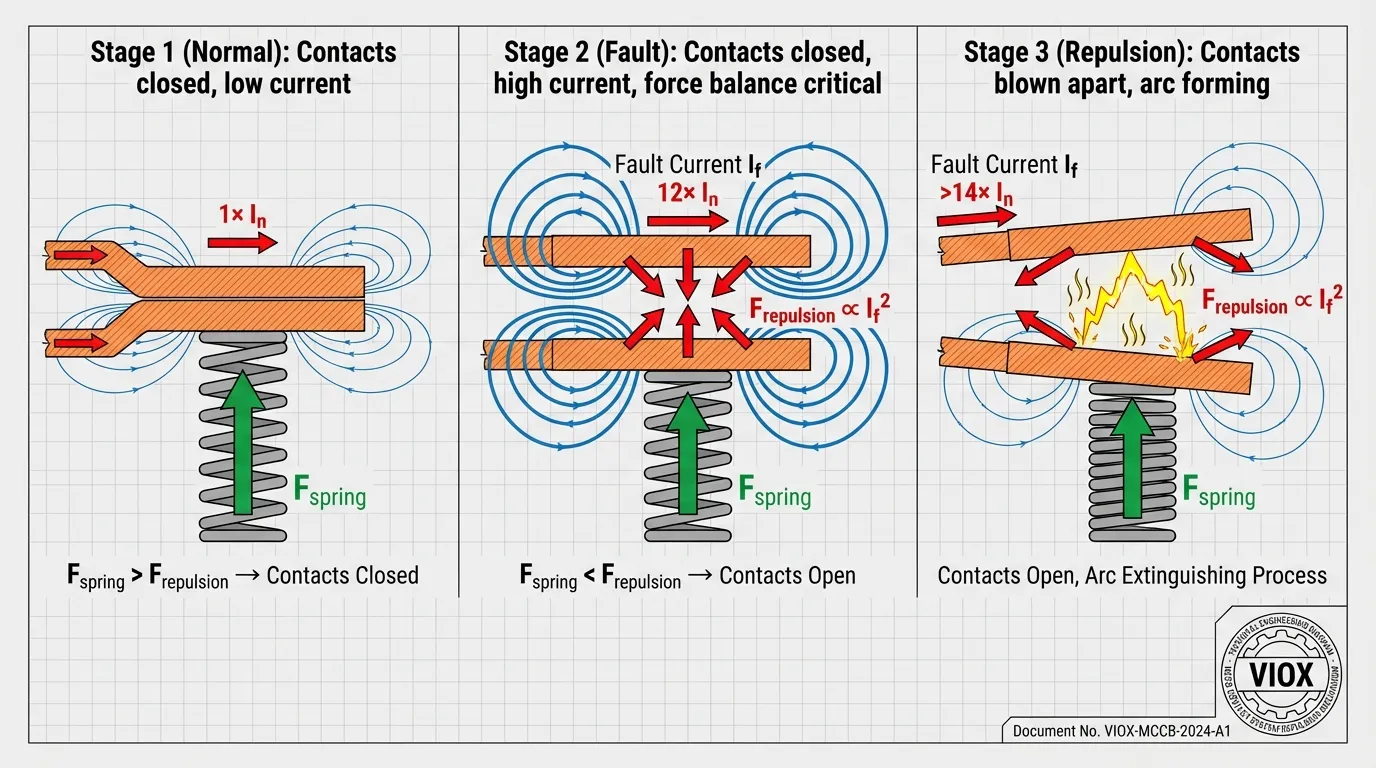
MCCB接点反発の物理学
力のバランスと電流閾値を示すMCCB電磁接点反発メカニズムの図 – VIOX Electric 電磁反発力 (ローレンツ力)。接点を閉じた状態に保つためには、接点ばねがこの力に打ち勝つ必要があります。.
力の平衡方程式:
Fばね > F反発力 = k · I2
どこでだ:
- Fばね = 接点ばねの圧縮力
- F反発力 = 電磁反発力(Iに比例)2)
- k = 幾何学的定数(接点間隔、導体構成)
| MCCB設計パラメータ | カテゴリA(MCCB) | カテゴリB(ACB) |
|---|---|---|
| 接点ばね圧力 | 低(2-5 N/mm) | 高(10-20 N/mm) |
| 反発閾値 | 12-14× In | >50× In |
| 接点開放速度 | 3-7 ms(超高速) | 20-50 ms(制御) |
| デザイン優先 | 制限故障エネルギー(I²t)2I²t | 耐故障時間 |
モーター始動に関する考慮事項
上海電気研究所による52個のモーターサンプルに関する調査では、全電圧始動(DOL)は、最初のピーク突入電流を発生させることが明らかになりました。 8-12× In ほとんどのモーターで、外れ値は13× Iに達します。n.
このデータは、MCCBの設計制約を推進します。
- 配電用MCCB:瞬時トリップは10-12× Iに設定n (コンデンサ突入電流または変圧器励磁でトリップしてはならない)
- モーター定格MCCB:瞬時トリップは13-14× Iに設定n (DOL始動を乗り越える必要がある)
- 接点反発閾値:始動過渡時に不要な接点開放を防ぐために、瞬時トリップ設定を15〜20%上回る必要があります。
100Aモーター定格MCCBの計算例:
接点反発閾値:1,300A × 1.2 = 1,560A(設計目標)
未申告の「Icw」能力:〜1,500A(反発閾値未満)
この1,500Aの閾値は、MCCBの固有の短時間耐量を示しています。これは、1,000〜1,500Aの故障範囲で下流デバイスとの協調には十分ですが、宣言されたACBのIcw値(通常30〜85kA)をはるかに下回っています。cw 値(通常30〜85kA)。.
MCCBの短時間遅延の実際の仕組み
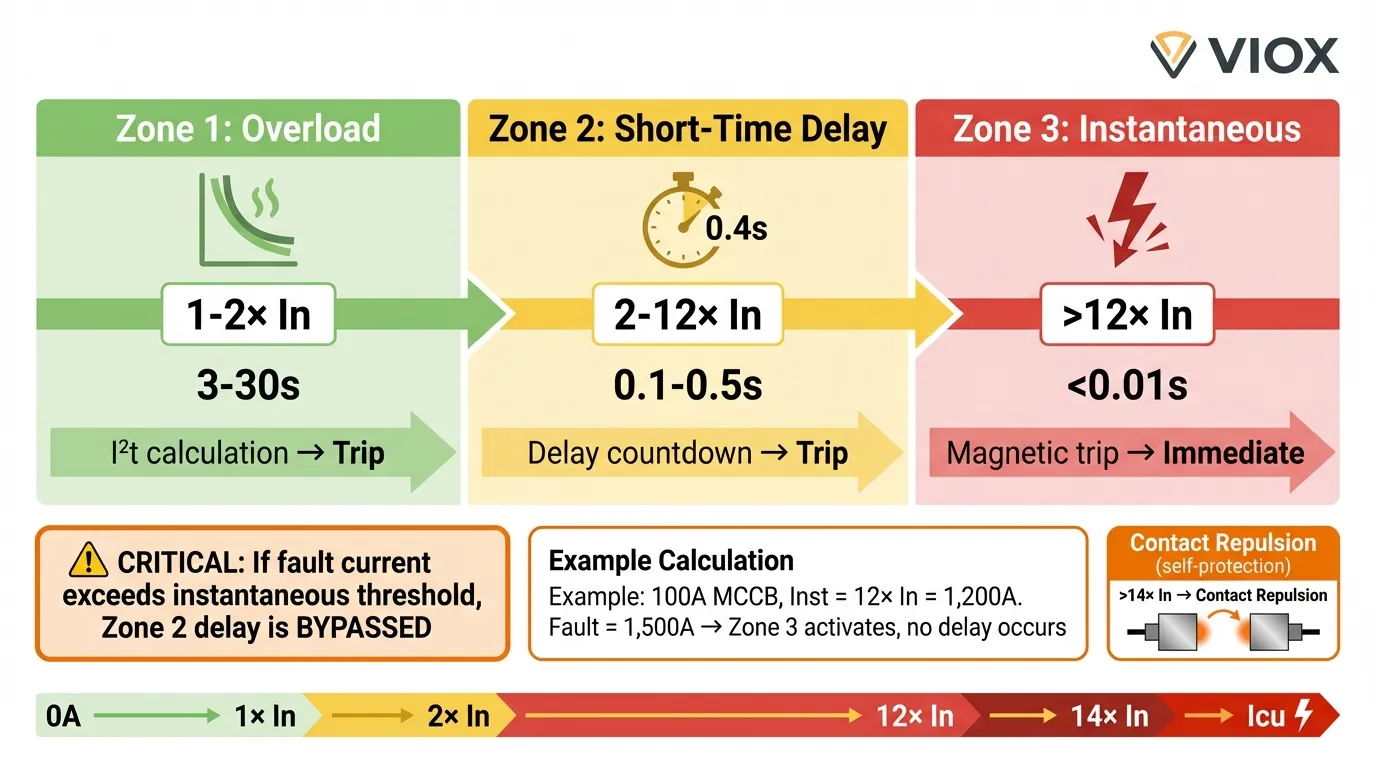
3つの動作ゾーン
最新の電子式トリップMCCBは3つの保護ゾーンを備えていますが、その相互作用はACBとは根本的に異なります。
| 保護ゾーン | 設定範囲 | 実際の動作 |
|---|---|---|
| 長時間(過負荷) | 0.4-1.0× In, 、3-30秒 | I²t計算による熱保護22-12× I |
| 短時間遅延 | 、0.1-0.5秒n, 瞬時閾値未満でのみアクティブ | 10-14× I |
| 瞬時 | (固定または調整可能)n ほとんどのMCCBでは無効にできません | シナリオ1:瞬時閾値未満の故障電流 |
条件
:故障電流 = 8× I(100Aブレーカーの場合800A)n (800A for a 100A breaker)
- 電流が長時間整定値を上回る → 短時間遅延が作動
- 電子式トリップユニットがカウントダウンを開始 (例: 0.4秒)
- 故障が継続する場合、遅延後にトリップコイルが励磁
- 蓄勢機構により接点が開く (開極時間: 約20~30 ms)
結果: 下流機器との真の時限協調
シナリオ2: 瞬時整定値を超える故障電流
:故障電流 = 8× I: 故障電流 = 15× In (100Aブレーカーの場合、1,500A)
- 電流が瞬時整定値を上回る → 電磁トリップが即座に作動
- 短時間遅延設定は バイパスされる
- トリップコイルが5~10 ms以内に励磁
- 接点が開くが、故障電流が既に電磁反発を引き起こしている可能性がある
結果: 意図的な遅延なし—MCCBは可能な限り高速にトリップ
シナリオ3: 反発閾値を大幅に超える故障電流
:故障電流 = 8× I: 故障電流 = 50× In (100Aブレーカーの場合、5,000A、Iに近づく)Icu)
- 電磁反発力がスプリング圧を上回る
- 接点が3~7 ms以内に吹き飛ぶ (トリップ機構よりも高速)
- アーク電圧が急速に上昇し、ピーク電流を制限 (限流動作)
- アークエネルギーがトリップ機構を作動させるか、ブレーカーはアーク消弧のみに依存
結果: 超高速限流—協調はしないが、I2t低減による機器保護
特殊なケース: 瞬時トリップを無効化できるMCCB
Schneider NSX “エネルギートリップ”機構
一部のハイエンドMCCB (例: Micrologicトリップユニット搭載のSchneider Electric NSX) では、選択性を向上させるために瞬時保護を無効にできます。ただし、これらのデバイスには、 強制的な安全オーバーライド “エネルギートリップ”または“瞬時オーバーライド”と呼ばれるものが組み込まれています。”
仕組み:
- ユーザーが瞬時トリップを無効にし、短時間遅延を有効にする (例: 10× In, 0.4秒)
- 故障電流が30× Iに達するn (100Aブレーカーの場合、3,000A)
- 接点が反発し、アークが発生
- アークエネルギーがアークチャンバー内のガス発生材料をイオン化
- 圧力上昇により、10~15 ms以内に空圧トリップ機構が作動
- ブレーカーがトリップ 電子式トリップユニットの設定に関係なく
| 故障電流レベル | NSXの応答 | 標準的なMCCBの応答 |
|---|---|---|
| 8× In | 短時間遅延が正常に機能 | 短時間遅延が機能 |
| 15× In | 短時間遅延が機能 (瞬時トリップ無効) | 瞬時トリップ (無効にできない) |
| >25× In | エネルギートリップが遅延をオーバーライド | 接点反発 + 瞬時トリップ |
この設計により、ユーザーが保護設定を誤って構成した場合の壊滅的な故障を防ぎます—MCCBは、選択性を損なう場合でも、極端な故障レベルで常に自己保護します。.
実用的な協調戦略
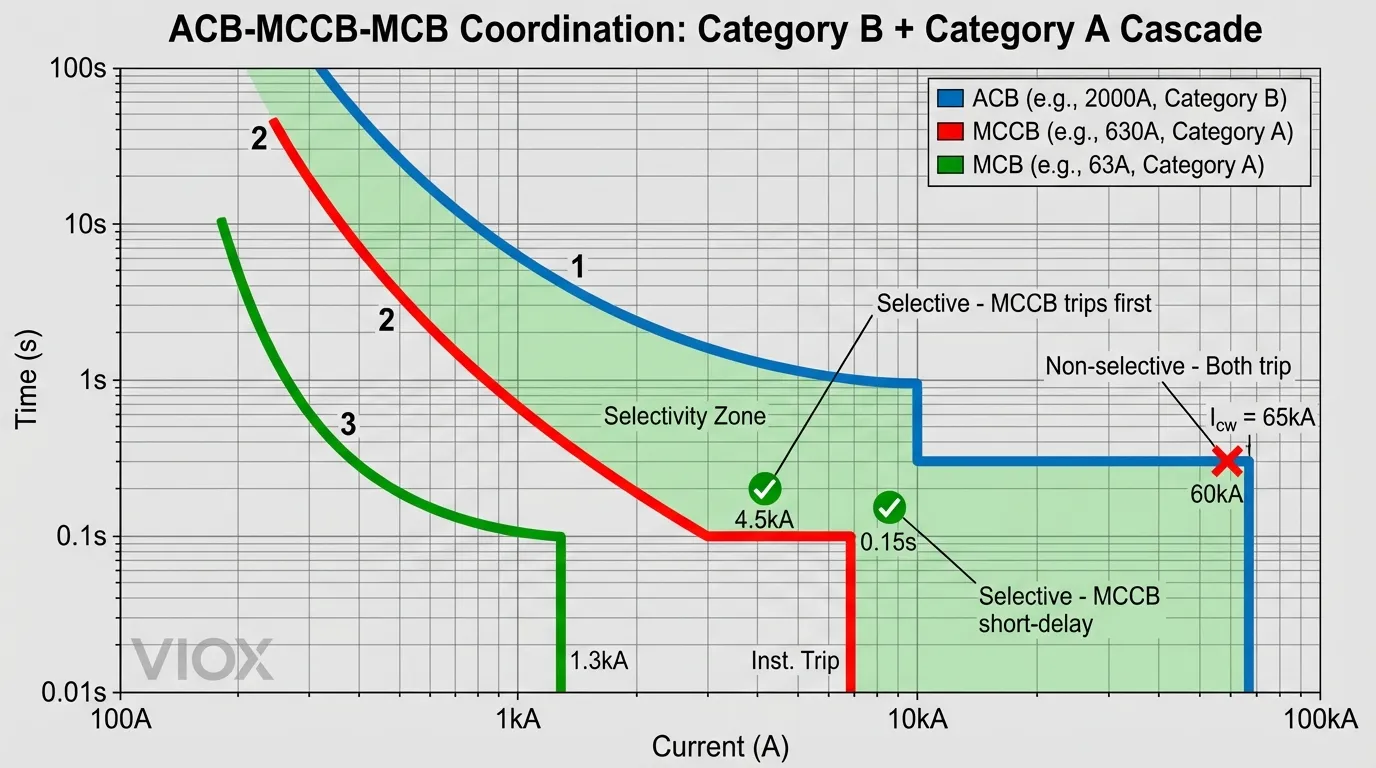
戦略1: ACB-to-MCCBカスケード (推奨)
コンフィギュレーション:
- 上流側: 1600A ACB, Icw = 65kA/0.5秒, 短時間遅延 = 0.4秒
- 下流側: 400A MCCB, IIcu = 50kA, 瞬時 = 5,000A (12.5× In)
協調分析:
| 故障箇所 | 故障電流 | 上流ACBの動作 | 下流MCCBの動作 |
|---|---|---|---|
| 下流フィーダー | 8 kA | 0.4秒待機 (Icw) | 瞬時トリップ(>12.5× In) |
| 下流フィーダー | 45 kA | 0.4秒待機 (Icw) | 瞬時トリップ(電流制限) |
| 主母線 | 60 kA | 0.4秒後にトリップ | 影響を受けない |
結果:最大50kAまでの完全選択性(MCCB IIcu limit)
戦略2:MCCB-MCCB間協調(限定的)
コンフィギュレーション:
- 上流側:400A MCCB、瞬時 = 5,000A (12.5× In)
- 下流側:100A MCCB、瞬時 = 1,300A (13× In)
協調分析:
| 故障電流 | 上流MCCB | 下流MCCB | 選択性? |
|---|---|---|---|
| 1,500A | 短時間遅延(0.3秒) | インスタントトリップ | ✅ はい |
| 4,000A | 短時間遅延(0.3秒) | インスタントトリップ | ✅ はい |
| 6,000A | インスタントトリップ | インスタントトリップ | ❌ いいえ(両方トリップ) |
選択性制限:〜4,500A(上流瞬時設定の90%)
改善:メーカーの協調テーブルを使用して、実際の通しエネルギーを確認してください。電流制限MCCBは、I2t識別により、より高い故障レベルでも選択性を達成する可能性があります。.
比較表:ACBとMCCBの短時間特性
| 特徴 | ACB(カテゴリB) | MCCB(カテゴリA) |
|---|---|---|
| Icw 宣言 | ✅ はい(30-85 kA、0.05-1.0秒) | ❌ いいえ(未宣言) |
| 固有の耐性 | 非常に高い(>50× In) | 限定的(12-14× In) |
| 接点ばね圧力 | 高い(反発を防ぐ) | 低い(電流制限を可能にする) |
| 瞬時トリップ | 無効にできる | 通常固定(無効にできない) |
| 短時間遅延範囲 | 0.05〜1.0秒(調整可能) | 0.1〜0.5秒(瞬時閾値未満のみ) |
| 協調方法 | 時間ベース(真の遅延) | 電流ベース(制限+遅延) |
| 典型的なアプリケーション | 主電源(1000-6300A) | フィーダー保護(16-1600A) |
| 下流との選択性 | フル(最大Icw) | 部分的(瞬時閾値まで) |
| 自己保護メカニズム | 熱質量+機械的強度 | 接点反発+アーク制限 |
これがシステム設計にとって重要な理由
誤解1:「MCCB短時間遅延= ACB短時間遅延」“
現実:MCCB短時間遅延は、狭い電流ウィンドウ(長時間閾値と瞬時閾値の間)内でのみ機能します。瞬時設定を超える故障の場合、MCCBはすぐにトリップし、遅延は発生しません。.
設計への影響:MCCB保護を指定する場合は、常に以下を確認してください。
- 下流デバイスの瞬時設定
- 協調ポイントでの最大故障電流
- 故障電流が上流MCCBの瞬時閾値を超えるかどうか
誤解2:「Icw 定格=短時間耐量なし」”
現実:MCCBは、接点反発閾値(〜12-14× In)まで固有の短時間耐量を持っています。この機能により、ACBほどではありませんが、下流デバイスとの限定的な協調が可能です。.
設計への影響:MCCB-MCCB間協調は可能ですが、以下が必要です。
- 慎重な瞬時設定分離(最小1.5:1の比率)
- メーカー提供の選択性テーブル
- 通過エネルギーに対する電流制限効果の考察
誤解 3: 「瞬時トリップを無効にすると MCCB = ACB になる」“
現実: 瞬時トリップを無効にできる MCCB (例: NSX) であっても、極端な故障レベル (>25× In) ではトリップを強制するエネルギーベースのオーバーライド機構が組み込まれています。ACB のように高い故障電流を「待つ」ことはできません。.
設計への影響: 調整可能な瞬時トリップ付きの MCCB を使用する場合:
- メーカーにエネルギー トリップ閾値を確認してください
- I に近づく故障電流で ACB のような動作を想定しないでくださいIcu
- 遅延トリップによるアークフラッシュ エネルギーへの影響を考慮してください
内部リンクと関連リソース
関連する保護概念をより深く理解するには、次の VIOX テクニカル ガイドをご覧ください。
- 電気的ディレーティング:温度、高度、およびグループ化係数 – 環境要因がブレーカーの電流定格と協調にどのように影響するかを学びます
- ATS および回路ブレーカーの協調ガイド: Icw & 選択性について解説 – 自動切換スイッチ アプリケーションにおけるカテゴリ A と B の協調の詳細な分析
- 電流制限回路ブレーカーのガイド:保護&スペック – 電磁反発の物理学と I2t 制限の詳細な解説
- 回路遮断器の種類:完全分類ガイド – ACB、MCCB、MCB の違いとアプリケーションの包括的な概要
- 商用 EV 充電保護ガイド: ACB、MCCB & タイプ B RCBO – 負荷計算を含む実際の協調の例
FAQ: MCCB 短時間保護
Q1: ACB の代わりに MCCB を主電源として使用できますか?
A: 可能ですが、完全な選択性が必要なシステムにはお勧めできません。MCCB には宣言された Icw 定格がないため、高い故障電流 (>10× In) での下流の協調のためにトリップを確実に遅らせることができません。選択性が重要な産業施設では ACB を主電源として使用するか、商用アプリケーションの場合はメーカーの表で協調制限を確認してください。.
Q2: MCCB の短時間遅延を 0.5 秒に設定したが、故障電流が 20× I の場合はどうなりますか?n?
A: ブレーカーはトリップします 即座に 磁気トリップ経由で、0.5 秒の遅延設定は無視されます。MCCB の短時間遅延は、故障電流が短時間ピックアップ (例: 2 ~ 10× In) と瞬時閾値 (例: 12× In) の間に留まる場合にのみ機能します。瞬時を超えると、磁気要素が電子設定をオーバーライドします。.
Q3: すべての MCCB が電流制限技術を使用していますか?
A: いいえ。熱磁気 MCCB (固定トリップ、調整不可) は通常、より遅いバイメタル過負荷要素を使用しており、真の電流制限を達成できない場合があります。高速作動接点と最適化されたアークシュートを備えた電子トリップ MCCB は、電流制限される可能性が高くなります (メーカーの通過曲線で Ip および I2t 値が予想される故障レベルを下回っていることを確認してください)。.
Q4: 2 つの MCCB 間の選択性を確認するにはどうすればよいですか?
A: メーカーの協調表を使用します (時間電流曲線だけではありません)。表は以下を考慮しています。
- 下流ブレーカーの通過エネルギー (I2t)
- 上流ブレーカーの非トリップ エネルギー閾値
- さまざまな故障レベルでの電流制限効果
例: Schneider Electric は、協調ガイドに詳細な選択性表を提供しており、特定の MCCB モデル間の最大選択性制限 (例: 「最大 15kA まで選択的」) を示しています。.
Q5: モーター定格の MCCB の瞬時設定が高い (13 ~ 14× In)?
A) のはなぜですか?n : 直入れ (DOL) モーターの始動中に誤トリップを防ぐためです。調査によると、モーターの突入電流は最初のピークで 12 ~ 13× Inに達する可能性があります。モーター定格の MCCB は、接点の反発閾値も高く (>14× I.
結論
)、始動過渡現象中に接点が吹き飛ばないようにします。吹き飛ぶと、不要な摩耗や再閉路時の溶着が発生する可能性があります。cw 定格 I のない短時間遅延保護を提供する MCCB の明らかなパラドックス 値は、保護の考え方の根本的な違いに起因します。.
ACB は機械的強度と熱質量によって故障に耐えますが、MCCB は電磁物理学と迅速なアーク遮断によって故障を制限します。nこの区別を理解することは、協調スキームを設計する電気エンジニアにとって重要です。MCCB は、固有の短時間耐量 (通常 12 ~ 14× I.
) 内で下流デバイスとの選択的な協調を実現できますが、遮断容量に近づく高い故障電流で ACB の動作を再現することはできません。故障電流範囲全体で完全な選択性が必要なアプリケーションの場合、ACB 主電源と MCCB フィーダーの協調は依然としてゴールド スタンダードであり、上流のカテゴリ B 時間遅延機能と下流のカテゴリ A 電流制限の利点を活用します。主要な設計原則“
VIOXについて: ブレーカーのカテゴリをアプリケーションに合わせてください。故障を「待つ」必要がある場合は ACB を使用し、故障を「迅速に停止」する必要がある場合は MCCB を使用します。. お問い合わせ : VIOX Electric は、電気機器の大手 B2B メーカーであり、モールド ケース サーキット ブレーカー (MCCB)、エア サーキット ブレーカー (ACB)、および産業用および商業用アプリケーション向けの包括的な保護ソリューションを専門としています。当社のエンジニアリング チームは、複雑な協調調査とシステム設計の最適化に関する技術サポートを提供します。.
