
Quand la basse tension rencontre la haute tension : la crise du circuit de commande
Vous avez passé des semaines à concevoir le système automatisé parfait. Il peut s’agir d’un contrôleur d’irrigation intelligent pour votre serre, d’un système de convoyeur industriel ou d’un concentrateur domotique. Votre code Arduino est élégant, votre logique est irréprochable et vous êtes prêt à tout connecter.
Puis la réalité vous frappe.
Votre microcontrôleur fournit 5 V à 40 milliampères. Mais la pompe à eau de 220 V que vous devez commander consomme 8 ampères. Vous essayez de les connecter avec un transistor : il surchauffe. Vous tentez une connexion directe via un MOSFET : votre Arduino libère sa fumée magique et meurt d’une mort $30. Ou pire : rien ne se passe du tout. La charge reste là, se moquant de votre diplôme d’ingénieur, refusant de s’allumer.
Alors, comment combler cet énorme fossé entre les signaux de commande basse tension et les charges industrielles haute tension sans détruire des équipements coûteux ni créer de risque pour la sécurité ?
La réponse est plus simple que vous ne le pensez, mais choisir la fausses. solution peut vous coûter du temps, de l’argent et potentiellement des vies. Ce guide complet vous transformera de confus à confiant dans la spécification, la sélection et la mise en œuvre de modules de relais pour toute application.
Pourquoi votre microcontrôleur ne peut pas commander des charges réelles (et pourquoi c’est en fait une bonne chose)
Avant de nous plonger dans les modules de relais, comprenons pourquoi pourquoi ce problème existe en premier lieu.
Votre microcontrôleur typique, qu’il s’agisse d’un Arduino, Raspberry Pi, ou d’un automate industriel, est conçu pour traiter des informations, pas pour alimenter des machines lourdes. Les broches GPIO (General Purpose Input/Output) de ces appareils fournissent généralement :
- Tension : 3,3 V à 5 V CC
- Actuel: 20 à 40 milliampères maximum
- Pouvoir: Environ 0,2 watt
Pendant ce temps, les appareils du monde réel exigent exponentiellement plus :
- Une pompe à eau standard : 220 V CA à 5-10 ampères (1 100-2 200 watts)
- Un moteur industriel : 480 V CA à 15 ampères (7 200 watts)
- Même une simple lampe domestique : 120 V CA à 0,5 ampère (60 watts)
Le calcul est brutal : Votre microcontrôleur peut fournir 0,2 watt, mais doit commander des appareils consommant de 60 à 7 200 watts. C’est comme essayer de remorquer un cargo avec une chaîne de vélo.
Mais voici le problème plus profond : il ne s’agit pas seulement de puissance. Il s’agit d’isolation et de sécurité. Lorsque vous travaillez avec des tensions élevées (tout ce qui dépasse 50 V CA ou 120 V CC), une erreur de câblage peut :
- Renvoyer 220 V CA dans votre microcontrôleur, le vaporisant instantanément
- Créer un chemin pour que des tensions dangereuses vous atteignent à travers les boîtiers métalliques
- Provoquer des incendies électriques dus à des arcs électriques et à une surchauffe
- Enfreindre les codes électriques qui exigent une isolation galvanique
Principaux enseignements : Vous avez besoin d’un “ traducteur électrique ”, un appareil qui accepte de minuscules signaux de commande, mais qui peut commuter des charges de puissance massives, tout en maintenant une barrière de sécurité physique entre les deux circuits. C’est précisément ce que les modules de relais ont été conçus pour faire.
Qu’est-ce qu’un module de relais ? Votre pont électrique entre deux mondes


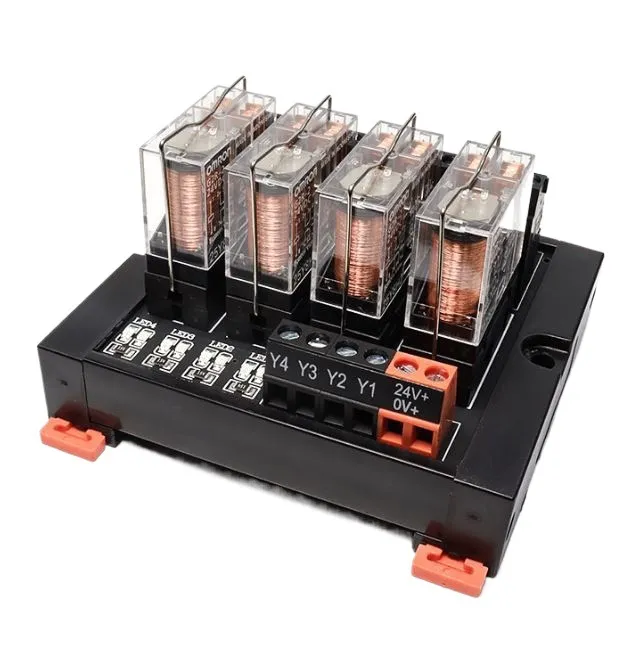
Un module de relais est une carte de circuit imprimé qui abrite un ou plusieurs commutateurs électromécaniques ou statiques, ainsi que des composants de support qui protègent à la fois votre circuit de commande et le relais lui-même. Considérez-le comme un pont électrique sophistiqué avec des rails de sécurité intégrés.
L’anatomie d’un module de relais
Contrairement à un relais autonome (juste le mécanisme de commutation), un module de relais est un sous-système complet contenant :
1. Les relais eux-mêmes
- Type électromagnétique : Utilise une bobine pour créer un champ magnétique qui déplace physiquement les contacts (le plus courant)
- Type statique (SSR) : Utilise des semi-conducteurs pour commuter sans pièces mobiles (plus rapide, durée de vie plus longue, mais plus cher)
2. Circuit de commande d’entrée
- Broches/connecteurs de borne : Où votre signal de commande basse tension se connecte (généralement 3 à 4 broches : VCC, GND, Signal, parfois Enable)
- Tampon d’entrée : Protège contre les pics de tension du côté de la commande
3. Contacts de puissance de sortie
- Bornes à vis (généralement 3) : Commun (COM), Normalement Ouvert (NO) et Normalement Fermé (NC)
- Ceux-ci gèrent la commutation haute tension et à courant élevé
4. Composants de protection critiques
- Diodes de roue libre : Empêchent les pics de tension lorsque la bobine du relais se désénergise (ceux-ci sauvent la vie de votre microcontrôleur)
- Optocoupleurs : Créent une isolation optique entre les côtés de la commande et de la puissance (dans les modules opto-isolés)
- Indicateurs LED : Confirmation visuelle de l’état du relais
- Pilotes de transistor : Amplifient le signal de commande faible à un courant suffisant pour la bobine du relais
Qu’est-ce qui le rend “ modulaire ” ?
Le terme “ module ” est essentiel ici. Ces appareils sont disponibles dans des configurations standardisées :
- Mono-canal : Contrôle une charge (un relais)
- 2 canaux, 4 canaux, 8 canaux, 16 canaux : Contrôlent plusieurs charges indépendantes
- Formats de carte : Montage sur CI, montage sur rail DIN, types de prises enfichables
- Tensions nominales standard : Entrée 5 V, 12 V, 24 V/sortie 120 V CA, 220 V CA, 480 V CA
Pro-Tip: Un module de relais n’est PAS juste un relais soudé à une carte. Les composants de support (en particulier la diode de roue libre et l’optocoupleur) sont ce qui empêche les défaillances catastrophiques. Essayer de construire votre propre “ module de relais ” avec juste un relais nu, c’est comme faire du parachutisme avec un drap de lit au lieu d’un parachute. Cela pourrait fonctionner… une fois.
Comment fonctionne un module de relais ? La séquence de commutation étape par étape
Comprendre le mécanisme interne vous aide à résoudre les problèmes et à sélectionner le bon module. Voici ce qui se passe à partir du moment où vous envoyez un signal de commande :
Étape 1 : Signal de commande appliqué (le déclencheur)
Votre microcontrôleur envoie un signal HAUT logique (généralement 3,3 V ou 5 V) à la broche d’entrée du module de relais. Ce petit signal passe par :
- Circuit de protection d’entrée (les résistances limitent le courant)
- LED d’optocoupleur (si présent) : convertit le signal électrique en lumière
- Phototransistor (reçoit la lumière, produit un signal électrique sur le côté isolé)
- Driver de transistor (amplifie le signal à ~50-200 mA nécessaires pour la bobine de relais)
Étape 2 : Activation de l’électroaimant (le muscle)
Le courant amplifié traverse la bobine électromagnétique du relais (généralement une résistance de 70 à 400 ohms). Cela crée un champ magnétique suffisamment puissant pour :
- Tirer un métal armature (bras mobile) vers la bobine
- Vaincre la tension du ressort qui maintient les contacts séparés
- Ce mouvement mécanique prend 5 à 15 millisecondes
Étape 3 : Fermeture du contact (l’interrupteur)
Le mouvement de l’armature provoque l’une des deux actions suivantes :
Pour la configuration normalement ouverte (NO) :
- Les contacts sont séparés par défaut (circuit ouvert)
- L’armature rapproche les contacts → le circuit se ferme → l’alimentation circule vers la charge
Pour la configuration normalement fermée (NF) :
- Les contacts se touchent par défaut (circuit fermé)
- L’armature sépare les contacts → le circuit s’ouvre → l’alimentation cesse de circuler
L’espace vide entre les contacts (généralement 1 à 2 mm) fournit une véritable isolation galvanique : une séparation physique complète entre votre circuit de commande 5 V et votre circuit d’alimentation 220 V.
Étape 4 : Mise sous tension de la charge (le résultat)
Une fois les contacts fermés, le courant alternatif ou continu haute tension circule à travers :
- Borne COM (commune) → reçoit l’alimentation de la source
- Borne NO (normalement ouverte) → se connecte à votre charge
- La charge fonctionne (le moteur tourne, la lumière s’allume, le solénoïde s’actionne, etc.)
Étape 5 : Mise hors tension (l’arrêt)
Lorsque vous supprimez le signal de commande (bas logique), le processus s’inverse :
- Le courant cesse de circuler dans la bobine de relais
- Le champ magnétique s’effondre
- Moment critique : L’effondrement du champ magnétique génère une pointe de tension inverse (tension de roue libre) qui peut atteindre plus de 100 V
- Diode de roue libre conduit immédiatement, shuntant cette pointe en toute sécurité à la terre
- La tension du ressort ramène l’armature à sa position par défaut
- Les contacts se séparent → le circuit d’alimentation s’ouvre → la charge se met hors tension
Pro-Tip: La diode de roue libre n’est pas un argument marketing facultatif : c’est le composant qui empêche votre Arduino de devenir un presse-papier coûteux. Sans elle, la pointe de tension due à l’effondrement de la bobine peut percer la broche de sortie de votre microcontrôleur, détruisant ainsi l’ensemble du circuit intégré. Vérifiez toujours que votre module de relais comprend cette protection.
Types de modules de relais : Choisir votre arme électrique
Tous les modules de relais ne sont pas créés égaux. Le type que vous choisissez dépend des exigences de votre application en matière de vitesse, de précision, de capacité de courant et d’environnement.
1. Modules de relais électromagnétiques (RE) : le cheval de trait
Comment ils fonctionnent : Contacts physiques déplacés par une bobine électromagnétique
Avantages :
- Capacité de courant élevée : Peut supporter de 5 A à 30 A par contact
- Véritable isolation galvanique : L'entrefer physique assure une séparation électrique complète
- Faible coût : 1 € à 10 € par canal de relais
- Compatibilité universelle : Fonctionne aussi bien avec des charges AC que DC
- Pas de problèmes de dissipation thermique : Contrairement aux semi-conducteurs, les contacts ne génèrent pas de chaleur pendant la conduction
Inconvénients :
- Usure mécanique : Les contacts se dégradent après 100 000 à 1 000 000 de cycles
- Commutation lente : Temps de réponse de 5 à 15 ms
- Clic audible : Chaque commutateur fait du bruit
- Rebond de contact : Les contacts peuvent s'ouvrir/se fermer par rebond pendant 1 à 2 ms pendant la transition
- Taille : Plus volumineux que les alternatives à semi-conducteurs
Idéal pour : Équipements industriels, commandes de CVC, démarreurs de moteurs, toute application où la capacité de courant et l'isolation priment sur la vitesse
2. Modules de relais statiques (SSR) — Le démon de la vitesse
Comment ils fonctionnent : Semi-conducteurs (TRIAC, thyristors, MOSFET) commutent sans pièces mobiles
Avantages :
- Commutation ultra-rapide : Temps de réponse inférieur à la milliseconde
- Fonctionnement silencieux : Aucun bruit mécanique
- Longue durée de vie : Pas d'usure des contacts = millions à milliards de cycles
- Pas de rebond de contact : Commutation propre pour l'électronique sensible
- Compact : Empreinte plus petite que les équivalents EMR
Inconvénients :
- Génération de chaleur : Les semi-conducteurs dissipent 1 à 2 watts même lorsqu'ils sont “allumés”, ce qui nécessite des dissipateurs thermiques
- Chute de tension : Chute de tension typique de 1 à 2 V à travers le SSR lors de la conduction (puissance gaspillée)
- Coût plus élevé : 10 € à 50 € et plus par relais
- Sensible au type de charge : Certains SSR ne fonctionnent qu'avec AC, d'autres uniquement avec DC
- Tolérance aux surtensions plus faible : Plus vulnérable aux pics de surtension que les contacts mécaniques
Idéal pour : Commutation à haute fréquence (contrôle PID, applications PWM), environnements sensibles à la température où le clic est inacceptable, applications à longue durée de vie (> 1 million de cycles)
3. Modules de relais hybrides — Le meilleur des deux mondes
Combine un relais électromagnétique pour la commutation de puissance avec un SSR pour le service pilote ou la suppression d'arc.
Idéal pour : Applications nécessitant à la fois une capacité de courant élevée et une durée de vie des contacts prolongée (par exemple, circuits de démarrage progressif de moteur)
4. Configurations spéciales
- Relais à verrouillage : Reste dans la dernière position sans alimentation continue de la bobine (économe en énergie pour les applications de batterie)
- Relais temporisés : Circuits de minuterie intégrés pour la commutation retardée
- Relais de sécurité : Contacts redondants avec mécanismes à guidage forcé (critique pour la sécurité des machines)
- Relais haute fréquence/RF : Spécialisés pour la radio et les télécommunications (adaptation d'impédance de 50 Ω, perte d'insertion minimale)
Conseil de pro : Les SSR semblent supérieurs sur le papier — plus rapides, plus longue durée de vie, silencieux. Mais ils sont le mauvais choix pour la plupart des commandes de moteur industrielles. Pourquoi ? La chute de tension crée de la chaleur, et la chaleur est l'ennemi dans une armoire de commande déjà chaude. De plus, les EMR gèrent bien mieux les surtensions de courant d'appel (6 à 8 fois le courant normal au démarrage des moteurs) que les semi-conducteurs. Faites correspondre le type de relais à l'application, pas au battage médiatique de la fiche technique.
Le guide complet de sélection des modules de relais : Six spécifications critiques
Choisir le mauvais module de relais est coûteux — contacts brûlés, charges défaillantes ou circuits de commande détruits. Suivez cette approche systématique pour spécifier correctement à chaque fois.
Étape 1 : Déterminez les exigences de votre charge
Avant même de regarder les spécifications du relais, caractérisez complètement votre charge :
Tension :
- Quelle est la tension d'alimentation ? (120V AC, 220V AC, 24V DC, etc.)
- Cela changera-t-il un jour ? (Certains équipements ont une capacité de double tension)
Actuel:
- Quel est le courant de fonctionnement (régime permanent) ?
- Quel est le courant d'appel (surtension au démarrage) ? Pour les moteurs, c'est généralement 6 à 10 fois le courant de fonctionnement pendant 100 à 500 ms
- Quel est le courant de rotor bloqué (pire scénario si le moteur cale) ?
Type de charge :
- Résistive : Radiateurs, lampes à incandescence (plus facile pour les contacts)
- Inductive : Moteurs, solénoïdes, transformateurs (génèrent une force contre-électromotrice, plus difficile pour les contacts)
- Capacitif : Alimentations, drivers de LED (fort courant d'appel, stress modéré)
- Charges de lampes : Les filaments de tungstène ont un courant d'appel 10 à 15 fois supérieur en raison de la résistance à froid
Exemple : Un moteur monophasé de 1 HP, 220 V :
- Courant de fonctionnement : ~6,8 A (indiqué sur la plaque signalétique)
- Courant d'appel : 6,8 A × 6 = ~40 A pendant 100 ms
- Par conséquent, vous avez besoin d'un relais d'une capacité nominale ≥10 A en continu ET capable de supporter un courant d'appel de 40 A
Étape 2 : Sélectionner le courant nominal des contacts (avec une marge de sécurité)
La règle d'or : Appliquer un facteur de réduction d'au moins 50 % pour la longévité
Si votre charge consomme 10 A en continu :
- Incorrect : Choisir un relais de 10 A (tombera en panne prématurément)
- Correct : Choisir un relais de 20 A (les contacts dureront la durée de vie nominale)
Pourquoi appliquer un facteur de réduction ?
- Les valeurs nominales des contacts supposent des conditions idéales (température, altitude, fréquence de commutation spécifiques)
- Les conditions réelles dégradent les performances
- La réduction de la valeur nominale prolonge la durée de vie des contacts de 100 000 cycles à plus de 500 000 cycles
Conseil de pro : Faites attention à Valeurs nominales CA par rapport à CC—elles sont radicalement différentes ! Un relais d'une capacité nominale de “ 10 A à 250 V CA ” peut ne supporter que “ 5 A à 30 V CC ”. Pourquoi ? Le courant alternatif traverse naturellement le zéro 100 à 120 fois par seconde, ce qui éteint tout arc. Le courant continu maintient un arc continu, provoquant une forte érosion des contacts. Vérifiez toujours les DEUX valeurs nominales.
Étape 3 : Vérifier la tension nominale de commutation
Règle : Choisir un relais d'une capacité nominale ≥150 % de votre tension d'alimentation
- Pour les charges de 120 V CA → relais de 180 V minimum (utiliser un relais de 250 V)
- Pour les charges de 220 V CA → relais de 330 V minimum (utiliser un relais de 400 V)
- Pour les charges de 24 V CC → relais de 36 V minimum (utiliser un relais de 50 V)
Pourquoi une telle marge de sécurité ? Pics de tension transitoires provenant de :
- Coups de foudre sur les lignes électriques à proximité
- Démarrages de gros moteurs ailleurs dans l'installation
- Équipement de soudage ou autres opérations à courant élevé
- Peut créer de brefs événements de surtension de 50 à 100 % au-dessus de la valeur nominale
Étape 4 : Choisir la tension de commande (correspond à votre contrôleur)
Tensions de commande courantes :
- 5 V : Arduino, Raspberry Pi, la plupart des microcontrôleurs amateurs
- 3,3 V : Certains microcontrôleurs plus récents, appareils IoT (vérifiez la compatibilité !)
- 12 V : Automobile, automates industriels, systèmes alimentés par batterie
- 24 V : Norme industrielle (automates, équipements d'automatisation)
Vérification essentielle : Votre microcontrôleur peut-il source assez de courant ?
La bobine de relais typique consomme 50 à 200 mA
Broches Arduino : 40 mA maximum (INSUFFISANT pour l'entraînement direct !)
Solution: Utilisez un module de relais avec un circuit de commande de transistor (la plupart des modules commerciaux incluent cela)
Étape 5 : Déterminer le nombre de canaux
Combien de charges indépendantes devez-vous contrôler ?
- Mono-canal : Une charge (la plus simple, le coût le plus bas)
- 2/4 canaux : Charges multiples, peu encombrant
- 8/16 canaux : Systèmes d'automatisation, panneaux de commande
Considération : Même si vous n'avez besoin que de 3 relais maintenant, l'achat d'un module à 4 canaux peut être plus rentable que trois modules simples et vous offre une capacité d'extension.
Étape 6 : Sélectionner les fonctionnalités spéciales (si nécessaire)
- Opto-isolation : Crée une barrière optique entre les côtés commande et alimentation
- Essentiel pour : les environnements industriels bruyants, les systèmes critiques pour la sécurité, les longs câbles
- Ajoute 1 $ à 5 $ par canal, mais offre une immunité au bruit supérieure
- LED d'indication : Confirmation visuelle de l’état du relais
- Inestimable pour le dépannage
- Standard sur la plupart des modules de qualité
- Style de montage :
- Montage sur PCB : Installations permanentes, développement de produits
- Montage sur rail DIN : Armoires industrielles, accès facile pour la maintenance
- Montage sur socle : Relais enfichables, capacité de remplacement rapide
Erreurs courantes concernant les modules de relais qui vous coûteront cher (et comment les éviter)
Erreur 1 : Ignorer le courant d'appel
Le scénario : Vous spécifiez un relais pour un moteur de 5A en vous basant sur le courant de fonctionnement nominal. Les contacts du relais se soudent après 2 semaines.
La Réalité : Le courant d'appel du moteur était de 30A pendant 100ms au démarrage. Les contacts n'étaient pas conçus pour cette surtension.
La solution : Multipliez toujours le courant nominal (FLA) du moteur par 6 à 8 pour le courant d'appel, et choisissez un relais conçu pour ce pic—ou utilisez un circuit de démarrage progressif pour limiter le courant d'appel.
Erreur 2 : Utiliser les valeurs nominales CC pour les charges CA (ou vice versa)
Le scénario : Votre relais “10A” tombe en panne en contrôlant un solénoïde CC de 5A.
La Réalité : La valeur nominale de 10A était pour le CA uniquement. La valeur nominale CC était de 3A.
La solution : Vérifiez la fiche technique pour les valeurs nominales CA et CC. Elles peuvent différer de 50 à 200%.
Erreur 3 : Absence de diode de roue libre pour la protection
Le scénario : Votre Arduino se réinitialise aléatoirement ou cesse de répondre après l'activation des relais.
La Réalité : Les pics de tension de roue libre provenant de la désexcitation de la bobine du relais corrompent le microcontrôleur ou détruisent les broches de sortie.
La solution : Utilisez toujours des modules de relais avec des diodes de roue libre intégrées. Si vous devez utiliser un relais nu, ajoutez une diode 1N4007 à travers la bobine (cathode au positif).
Erreur 4 : Sous-dimensionnement de la section des fils
Le scénario : Votre relais correctement dimensionné tombe toujours en panne ou provoque des problèmes de chute de tension.
La Réalité : Vous avez utilisé un fil de calibre 22 AWG pour une charge de 15A. Le fil est le goulot d'étranglement.
La solution : Suivez les tableaux d'ampérage des fils :
- Charge de 10A → 18 AWG minimum
- Charge de 15A → 14 AWG minimum
- Charge de 20A → 12 AWG minimum
Erreur 5 : Négliger le matériau des contacts pour votre application
La Réalité : Tous les contacts de relais ne sont pas égaux :
- Oxyde d'argent-cadmium : Usage général, bon pour la plupart des charges
- Oxyde d'argent-étain : Charges de moteur, haute tolérance au courant d'appel
- Or : Commutation de signaux de faible puissance (milliampères), PAS pour les charges de puissance
La solution : Faites correspondre le matériau des contacts au type de charge—vérifiez les spécifications de la fiche technique.
Exemples d'applications concrètes
Exemple 1 : Contrôle d'éclairage domestique intelligent
Défi : Contrôler 8 lumières domestiques (120V AC, 60W chacune) avec un Raspberry Pi (3.3V GPIO).
Solution:
- Module de relais 5V à 8 canaux avec opto-isolation
- Chaque canal est conçu pour 10A à 250V AC (60W ÷ 120V = 0.5A, marge de sécurité massive)
- Charge résistive (incandescente) = facile pour les contacts
- Coût total : ~20€ pour le module
Exemple 2 : Contrôle de moteur de convoyeur industriel
Défi : Démarrer/arrêter un moteur triphasé de 2HP, 220V avec un PLC (sortie 24V DC).
Solution:
- Module de relais industriel 24V à un seul canal, montage sur rail DIN
- Valeur nominale des contacts : 25A à 480V AC (le moteur consomme 8A en fonctionnement, 48A en courant d'appel)
- Contacts en oxyde d'argent-étain pour service moteur
- Indicateur LED intégré pour la visibilité de la maintenance
- Coût : ~45€, mais empêche des événements d'arrêt de production de plus de 5 000€
Exemple 3 : Système d'irrigation Arduino
Défi : Contrôler 4 électrovannes (24V AC, 0.5A chacune) avec Arduino (5V).
Solution:
- Module de relais 5V à 4 canaux
- Valeur nominale de 10A par canal (énorme marge de sécurité pour les vannes de 0.5A)
- Coût : ~8€
- Critique : Chaque solénoïde est une charge inductive, donc les diodes de roue libre dans le module sont essentielles
Conclusion : Votre liste de contrôle de spécification de module de relais
Un module de relais est votre pont essentiel entre l'intelligence de contrôle de faible puissance et l'action réelle de haute puissance. En suivant cette approche systématique, vous spécifierez le bon module à chaque fois :
Avant d'acheter :
- Calculez le courant de fonctionnement ET le courant d'appel pour votre charge
- Vérifiez que les valeurs nominales AC et DC correspondent à votre application
- Réduisez les valeurs nominales des contacts de 50 % pour une plus longue durée de vie
- Confirmez que la tension de commande correspond à votre microcontrôleur
- Vérifiez la présence d'une diode de roue libre et d'une protection par optocoupleur
- Sélectionnez le style de montage approprié pour votre installation
- Tenez compte des besoins d'expansion futurs (canaux supplémentaires)
Résumé des points clés :
- L'isolation est primordiale : Ne faites jamais de compromis sur la séparation physique/optique entre la commande et la puissance
- Le courant détruit les contacts : Une capacité de courant sous-évaluée est la principale cause de défaillance prématurée des relais
- La protection n'est pas facultative : Les diodes de roue libre protègent votre microcontrôleur ; une protection par fusible appropriée protège votre installation
- Adaptez l'outil au travail : Relais électromécaniques pour la puissance, relais statiques pour la vitesse, opto-isolation pour l'immunité au bruit
Votre prochaine étape : Avant de cliquer sur “ Ajouter au panier ”, sortez la fiche technique et vérifiez chaque spécification par rapport aux exigences réelles de votre charge. Les 10 minutes que vous y consacrez maintenant vous feront gagner des heures de dépannage et des centaines de dollars en matériel brûlé.
Vous avez des questions sur une application spécifique de module de relais ? Le mode de défaillance le plus courant est de choisir en fonction de la tension seule, tout en ignorant la capacité de courant et le type de charge – ne laissez pas cela être votre coûteuse leçon apprise.
