
AC-1, AC-2, AC-3 และ AC-4 คือหมวดหมู่การใช้งานที่ใช้ระบุประเภทของโหลดที่คอนแทคเตอร์สามารถสลับวงจรได้ ซึ่งมีความสำคัญเนื่องจากคอนแทคเตอร์ตัวเดียวกันอาจมีพิกัดกระแสที่แตกต่างกันอย่างมาก ขึ้นอยู่กับประเภทของโหลด คอนแทคเตอร์ที่สามารถรองรับกระแสสูงได้ภายใต้ แน่นอ-1 โหลดประเภทความต้านทาน (Resistive duty) อาจมีพิกัดที่ต่ำกว่ามากภายใต้ ซี-3 โหลดประเภทมอเตอร์ (Motor duty).
สำหรับงานมอเตอร์ในอุตสาหกรรมส่วนใหญ่, ซี-3 คือพิกัดสำคัญที่ต้องตรวจสอบ สำหรับเครื่องทำความร้อนและโหลดประเภทความต้านทานเป็นหลัก, แน่นอ-1 มักจะมีความเกี่ยวข้องมากกว่า สำหรับการใช้งานมอเตอร์แบบ Inching, Plugging, Jogging หรือการกลับทางหมุน, เอซี-4 รุนแรงกว่า AC-3 มาก และจำเป็นต้องเลือกอย่างระมัดระวังจากข้อมูลของผู้ผลิต.
มาตรฐานหลักสำหรับคอนแทคเตอร์แบบกลไกไฟฟ้าและสตาร์ทเตอร์มอเตอร์คือ IEC 60947-4-1. ควรใช้ประเภทการใช้งาน (Utilization Category) ที่ระบุไว้บนป้ายชื่อหรือเอกสารข้อมูลของคอนแทคเตอร์เสมอ ไม่ใช่ดูเพียงค่ากระแสไฟฟ้าที่ระบุไว้บนฉลากด้านหน้าเท่านั้น.
ตารางพิกัดอย่างย่อ: AC-1, AC-2, AC-3, AC-4
| หมวดหมู่การใช้ประโยชน์ | โหลดทั่วไป | คิดถึงเรื่องโปรแกรม | คำเตือนในการเลือกใช้งาน |
|---|---|---|---|
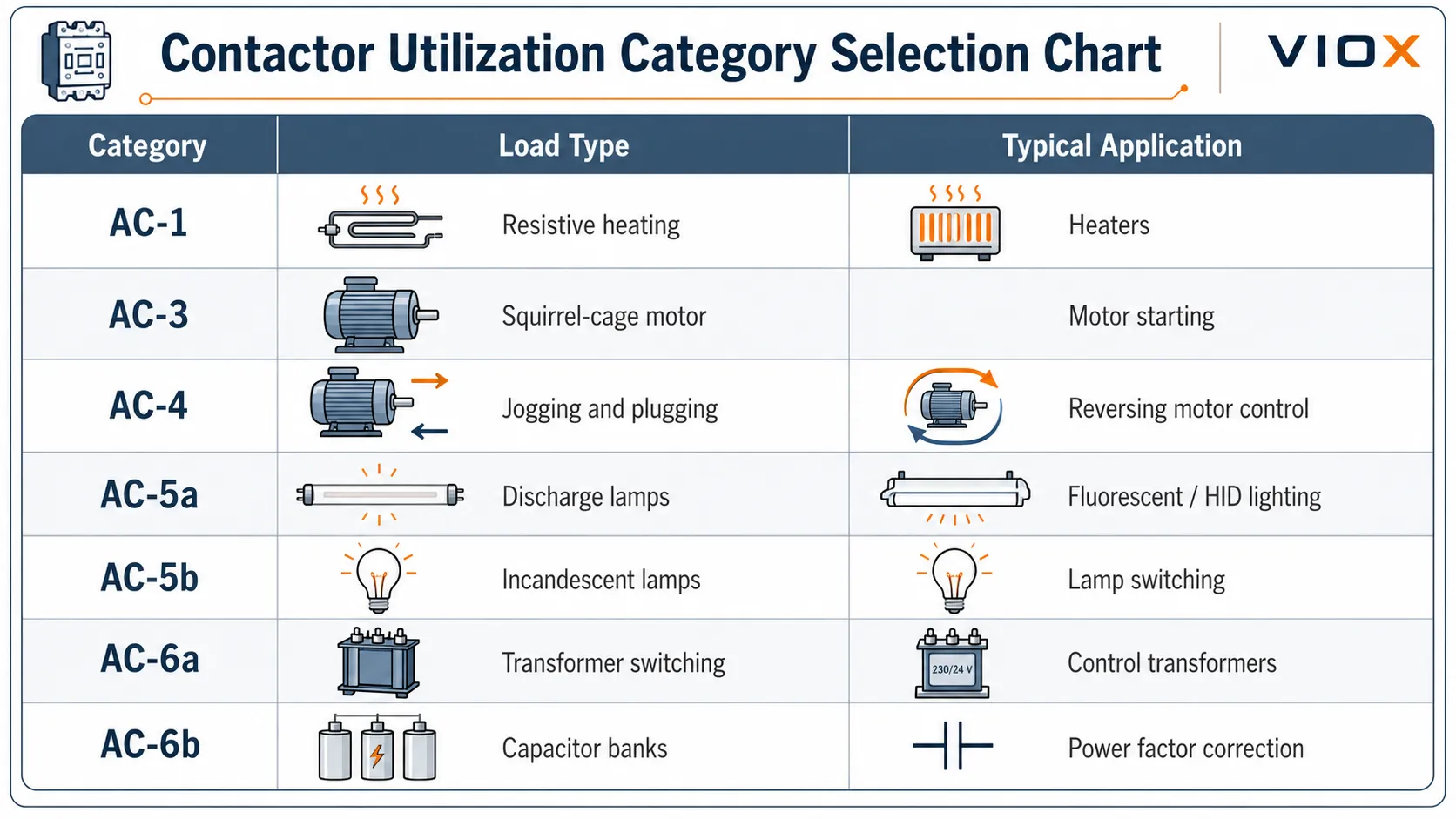
| แน่นอ-1 | โหลดไฟฟ้ากระแสสลับแบบไม่มีความเหนี่ยวนำหรือมีความเหนี่ยวนำเล็กน้อย | เครื่องทำความร้อนแบบต้านทาน, เตาอบ, โหลดในระบบจำหน่ายไฟฟ้า | พิกัดมักจะสูงกว่าการใช้งานสำหรับมอเตอร์ แต่ไม่เหมาะสำหรับโหลดมอเตอร์ทุกประเภท |
| AC-2 | มอเตอร์แบบสลิปริง (Slip-ring motors) | เครน รอก และเครื่องจักรที่ต้องการแรงบิดขณะสตาร์ทสูง | มีความต้องการสูงกว่า AC-1 และพบได้น้อยในตู้ควบคุมไฟฟ้าทั่วไปในปัจจุบัน |
| ซี-3 | มอเตอร์แบบกรงกระรอก (Squirrel-cage motors) | ปั๊ม พัดลม คอมเพรสเซอร์ สายพานลำเลียง และมอเตอร์ระบบปรับอากาศ (HVAC) | ประเภทของคอนแทคเตอร์สำหรับมอเตอร์ที่พบได้บ่อยที่สุด |
| เอซี-4 | มอเตอร์แบบกรงกระรอกที่มีการทำงานแบบเขยื้อน (Inching), การเบรกด้วยกระแสไฟฟ้า (Plugging) และการกลับทางหมุน | การทำงานของเครนแบบเขยื้อน, ระบบขับเคลื่อนแบบกลับทางหมุน และการทำงานที่ต้องสตาร์ท-หยุดบ่อยครั้ง | รุนแรงกว่า AC-3 มาก อายุการใช้งานทางไฟฟ้าจะลดลงอย่างรวดเร็วหากเลือกใช้ไม่เหมาะสม |
| DC-1 | โหลด DC ที่ไม่มีค่าความเหนี่ยวนำ หรือมีค่าน้อยมาก | ฮีตเตอร์ไฟฟ้ากระแสตรง, วงจรไฟฟ้ากระแสตรงแบบความต้านทาน | ภาระงานไฟฟ้ากระแสตรงที่ง่ายกว่า แต่พฤติกรรมการเกิดอาร์กของไฟฟ้ากระแสตรงยังคงมีความสำคัญ |
| DC-3 | มอเตอร์ไฟฟ้ากระแสตรงแบบขนาน (Shunt DC motors) | การสตาร์ท, การหยุดแบบย้อนกลับ (Plugging), การเดินเครื่องทีละน้อย (Inching), การเบรกแบบไดนามิก | ต้องการประสิทธิภาพการตัดวงจรที่รองรับไฟฟ้ากระแสตรง |
| DC-5 | มอเตอร์ไฟฟ้ากระแสตรงแบบอนุกรม (Series DC motors) | งานระบบขับเคลื่อน, รอกไฟฟ้า, งานมอเตอร์ไฟฟ้ากระแสตรงภาระหนัก | ภาระการสลับกระแสไฟฟ้าของมอเตอร์ไฟฟ้ากระแสตรงที่รุนแรงกว่า |
Utilization Category คืออะไร?
เป็ ประเภทการใช้งาน เป็นการกำหนดประเภทของโหลดและภาระการสลับกระแสไฟฟ้าที่คอนแทคเตอร์ถูกออกแบบมาให้รองรับ ไม่ใช่เพียงแค่ป้ายระบุเท่านั้น แต่ยังส่งผลต่อพิกัดกระแสไฟฟ้าที่ใช้งานได้จริงของคอนแทคเตอร์ตัวเดียวกันอีกด้วย.
ตัวอย่างเช่น คอนแทคเตอร์อาจแสดงค่ากระแสไฟฟ้าค่าหนึ่งสำหรับ AC-1 และค่ากระแสไฟฟ้าที่ต่ำกว่าสำหรับ AC-3 ซึ่งไม่ได้หมายความว่าผู้ผลิตให้ข้อมูลไม่สอดคล้องกัน แต่หมายความว่าโหลดประเภทความร้อนแบบต้านทานและโหลดประเภทมอเตอร์สร้างความเค้นต่อหน้าสัมผัสที่แตกต่างกัน.
ปัจจัยสำคัญประกอบด้วย:
- กระแสโหลด
- แรงดันไฟฟ้า
- ตัวประกอบกำลัง (Power factor)
- กระแสขณะสตาร์ทมอเตอร์ (Motor starting current)
- กระแสไหลเข้า
- ความเหนี่ยวนำ (Inductance)
- ความถี่ในการสวิตช์
- การที่คอนแทคเตอร์ทำการต่อหรือตัดกระแสไฟฟ้าสูง
- ประเภทของโหลดว่าเป็นไฟฟ้ากระแสสลับ (AC) หรือไฟฟ้ากระแสตรง (DC)
- อายุการใช้งานทางไฟฟ้าที่คาดหวัง
นี่คือเหตุผลว่าทำไมการเลือกคอนแทคเตอร์โดยพิจารณาจากขนาดเฟรมหรือพิกัดกระแสเพียงอย่างเดียว อาจนำไปสู่ปัญหาความร้อนสูงเกินไป หน้าสัมผัสเชื่อมติดกัน การสึกหรอที่รวดเร็วกว่ากำหนด หรือการขัดข้องโดยไม่มีสาเหตุชัดเจน.
พารามิเตอร์ทางไฟฟ้าที่สำคัญเบื้องหลังหมวดหมู่การใช้งาน
หมวดหมู่การใช้งานไม่ใช่แค่ชื่อเรียกประเภทการใช้งานเท่านั้น แต่ยังเชื่อมโยงกับความเค้นในการสลับวงจร ได้แก่ ปริมาณกระแสที่คอนแทคเตอร์ต้องทำ (Make) ปริมาณกระแสที่ต้องตัด (Break) และความยากง่ายในการดับอาร์ค.
| พารามิเตอร์ | ความหมาย | ทำไมมันจึงสำคัญ |
|---|---|---|
| Ie | พิกัดกระแสใช้งาน (Rated operational current) | ค่ากระแสที่ใช้สำหรับแรงดันไฟฟ้าและหมวดหมู่การใช้งานที่กำหนด |
| Ue | แรงดันไฟฟ้าใช้งานที่กำหนด | แรงดันไฟฟ้าที่พิกัดกระแสไฟฟ้าดังกล่าวมีผลบังคับใช้ |
| I make / Ie | ความรุนแรงของกระแสขณะเริ่มเดินเครื่อง (Making-current) | ระบุปริมาณกระแสกระชากหรือกระแสขณะเริ่มเดินเครื่องที่คอนแทคเตอร์ต้องรองรับได้ในขณะปิดวงจร |
| I break / Ie | ความรุนแรงของกระแสตัดวงจร | ระบุปริมาณกระแสที่คอนแทคเตอร์ต้องตัดวงจรได้ในขณะเปิดวงจร |
| cos phi | ตัวประกอบกำลังไฟฟ้ากระแสสลับ (AC power factor) | ตัวประกอบกำลังที่ต่ำกว่าหมายถึงความเค้นทางเหนี่ยวนำที่สูงขึ้นและการดับอาร์คที่ยากขึ้น |
| ค่าคงที่ของเวลา L/R | พฤติกรรมความเหนี่ยวนำของวงจรไฟฟ้ากระแสตรง (DC) | ค่าคงที่เวลา L/R ที่สูงขึ้นหมายถึงอาร์คไฟฟ้ากระแสตรงจะดับได้ยากขึ้น |
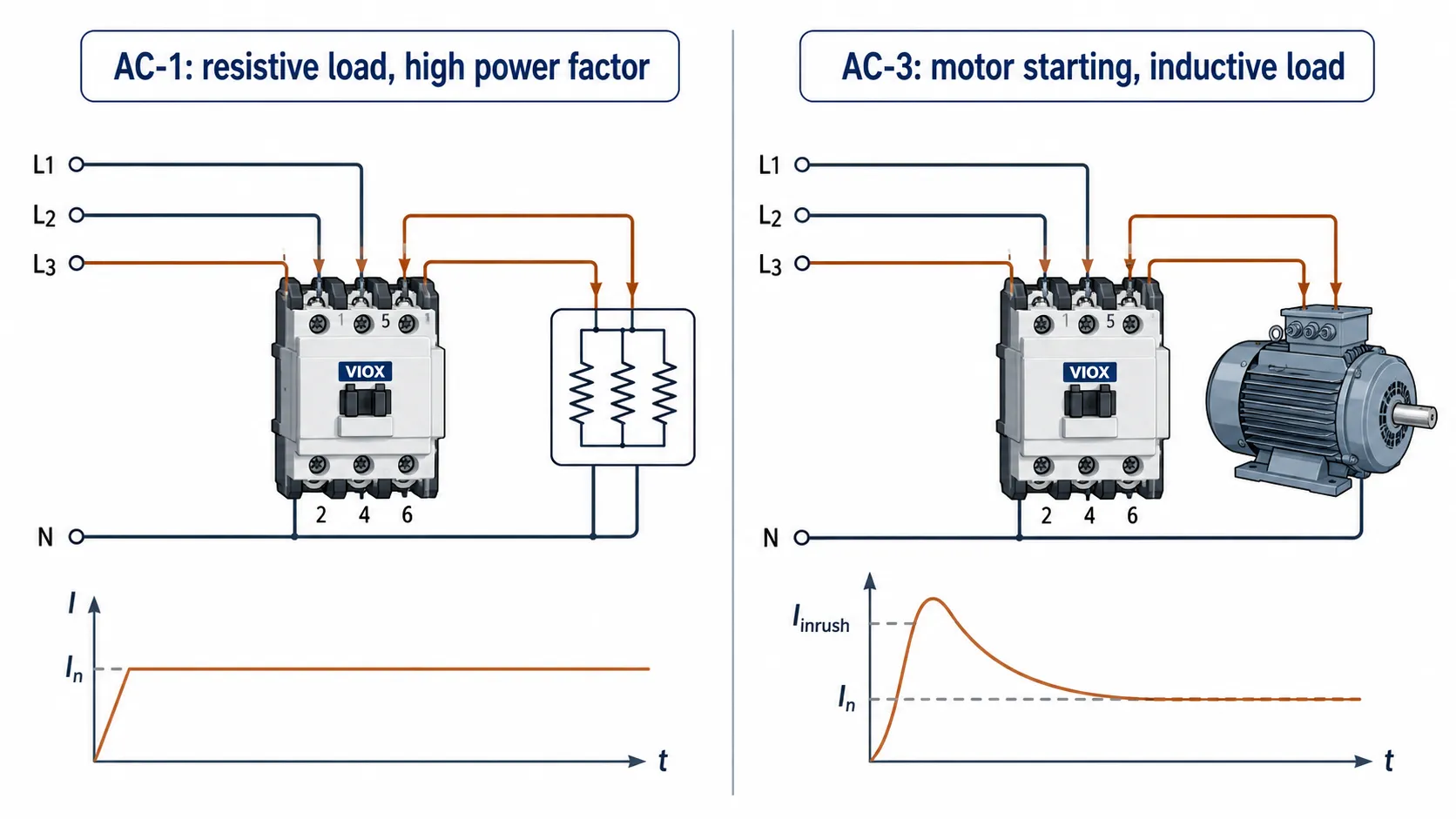
ในฐานะข้อมูลอ้างอิงทางวิศวกรรมแบบย่อ AC-1 เกี่ยวข้องกับโหลดประเภทความต้านทานที่มีค่าตัวประกอบกำลังสูง ซึ่งมักกล่าวถึงที่ cos phi >= 0.95. การใช้งานมอเตอร์แบบ AC-3 มีความรุนแรงกว่ามากเนื่องจากคอนแทคเตอร์ต้องปิดวงจรขณะที่มีกระแสสตาร์ทมอเตอร์ คำอธิบายในแคตตาล็อกตามมาตรฐาน IEC หลายแห่งระบุว่าการใช้งาน AC-3 มีค่ากระแสขณะปิดวงจรอยู่ที่หลายเท่าของกระแสใช้งานปกติ ซึ่งมักแสดงเป็น I make = 6 x Ie ในตัวอย่างแบบย่อ โปรดตรวจสอบค่าทดสอบและพิกัดที่แน่นอนจากมาตรฐานฉบับล่าสุดและเอกสารข้อมูลของผู้ผลิตเสมอ.
AC-1 กับ AC-3: ความแตกต่างที่สำคัญที่สุด
ความสับสนที่พบบ่อยที่สุดคือ AC-1 กับ AC-3.
แน่นอ-1 ใช้สำหรับโหลดที่ไม่มีความเหนี่ยวนำหรือมีความเหนี่ยวนำต่ำ เช่น เครื่องทำความร้อนแบบความต้านทาน คอนแทคเตอร์มักจะตัดต่อกระแสไฟฟ้าที่มีความเสถียรค่อนข้างสูงและตัดวงจรได้ง่ายกว่า.
ซี-3 ใช้สำหรับมอเตอร์แบบกรงกระรอก คอนแทคเตอร์จะทำงานขณะมอเตอร์เริ่มเดินเครื่องและตัดวงจรหลังจากมอเตอร์ถึงความเร็วรอบปกติ ซึ่งมีความต้องการสูงกว่า AC-1 เนื่องจากมอเตอร์สร้างกระแสกระชากสูงและความเค้นจากการตัดต่อโหลดที่มีความเหนี่ยวนำ.
| คำถาม | แน่นอ-1 | ซี-3 |
|---|---|---|
| ประเภทของโหลดหลัก | โหลดความต้านทานหรือโหลดที่มีค่าความเหนี่ยวนำเล็กน้อย | มอเตอร์แบบกรงกระรอก (Squirrel-cage motors) |
| การใช้งานทั่วไป | เครื่องทำความร้อน เตาอบ โหลดแบบความต้านทาน | ปั๊ม พัดลม คอมเพรสเซอร์ สายพานลำเลียง |
| ความเค้นจากการตัดต่อวงจร | ต่ำกว่า | สูงกว่า |
| พิกัดกระแสบนคอนแทคเตอร์ตัวเดียวกัน | มักจะสูงกว่า | โดยปกติจะต่ำกว่า |
| ความเสี่ยงหลักหากใช้งานผิดประเภท | ความร้อนสูงเกินไปหากเลือกขนาดเล็กเกินไป | หน้าสัมผัสสึกหรอ การเชื่อมติดกันของหน้าสัมผัส และอายุการใช้งานทางไฟฟ้าที่สั้นลง |
กฎง่ายๆ: ใช้ AC-1 สำหรับโหลดประเภทความต้านทาน และ AC-3 สำหรับการสตาร์ทมอเตอร์ทั่วไป ห้ามเลือกขนาดคอนแทคเตอร์สำหรับมอเตอร์โดยอ้างอิงจากพิกัดกระแส AC-1.
คอนแทคเตอร์ AC-1: โหลดประเภทความต้านทานและโหลดที่มีค่าความเหนี่ยวนำต่ำ
AC-1 ใช้สำหรับโหลดไฟฟ้ากระแสสลับที่ไม่มีค่าความเหนี่ยวนำหรือมีค่าความเหนี่ยวนำต่ำ โหลดเหล่านี้มีค่าตัวประกอบกำลัง (Power Factor) สูง และไม่ก่อให้เกิดความเครียดในการสลับวงจรเหมือนกับมอเตอร์.
การใช้งาน AC-1 ทั่วไป ได้แก่:
- เครื่องทำความร้อนแบบความต้านทาน
- เตาอบอุตสาหกรรม
- ขดลวดความร้อน
- โหลดการกระจายไฟฟ้าบางประเภท
- โหลดประเภทความต้านทานที่ไม่ใช่มอเตอร์
พิกัด AC-1 มักจะสูงกว่าพิกัด AC-3 ในคอนแทคเตอร์ตัวเดียวกัน เนื่องจากโหลดประเภทนี้ตัดต่อวงจรได้ง่ายกว่า นี่คือสาเหตุที่ทำให้เกิดข้อผิดพลาดในการเลือกใช้งานบ่อยครั้ง: ผู้ซื้อเห็นค่ากระแส AC-1 ที่สูงบนแผ่นป้ายชื่อและเข้าใจผิดว่าคอนแทคเตอร์ตัวเดียวกันนั้นสามารถรองรับโหลดมอเตอร์ที่มีกระแสเท่ากันได้ ซึ่งโดยปกติแล้วไม่สามารถทำได้.
คอนแทคเตอร์ AC-2: สำหรับงานมอเตอร์แบบสลิปริง (Slip-Ring Motor)
AC-2 ใช้สำหรับมอเตอร์แบบสลิปริง มอเตอร์ประเภทนี้พบได้น้อยกว่ามอเตอร์แบบกรงกระรอก (Squirrel-cage) ในการติดตั้งสมัยใหม่หลายแห่ง แต่ยังคงพบได้ในงานที่ต้องการแรงบิดขณะสตาร์ทสูงหรือต้องการการควบคุมการสตาร์ท.
การใช้งานทั่วไปของ AC-2 ได้แก่:
- เครน
- รอกไฟฟ้า
- สายพานลำเลียงขนาดใหญ่
- เครื่องบด
- เครื่องจักรที่ใช้กระแสสตาร์ทสูง
AC-2 มีความต้องการสูงกว่า AC-1 เนื่องจากเกี่ยวข้องกับสภาวะการสตาร์ทและการสับเปลี่ยนของมอเตอร์ หากโครงการใช้มอเตอร์แบบสลิปริง (slip-ring motors) อย่าเลือกใช้ AC-3 โดยอัตโนมัติโดยไม่ได้ตรวจสอบประเภทและลักษณะการทำงานของมอเตอร์ก่อน.
คอนแทคเตอร์ AC-3: สำหรับการสตาร์ทมอเตอร์มาตรฐาน
AC-3 เป็นประเภทที่สำคัญที่สุดสำหรับผู้ใช้งานในภาคอุตสาหกรรมจำนวนมาก เนื่องจากครอบคลุมการสตาร์ทและการหยุดทำงานของมอเตอร์แบบกรงกระรอก (squirrel-cage motor) ทั่วไป.
การใช้งานทั่วไปของ AC-3 ได้แก่:
- ปั๊มน้ำ
- พัดลม
- คอมเพรสเซอร์
- สายพานลำเลียง
- มอเตอร์ระบบปรับอากาศและระบายอากาศ (HVAC)
- เครื่องจักรกล
- การควบคุมมอเตอร์สามเฟสทั่วไป
ภายใต้การใช้งานประเภท AC-3 คอนแทคเตอร์จะทำหน้าที่ตัดต่อกระแสขณะสตาร์ทมอเตอร์และตัดกระแสขณะมอเตอร์ทำงานตามปกติ กระแสขณะสตาร์ทมอเตอร์อาจสูงกว่ากระแสขณะทำงานหลายเท่า ดังนั้นจึงต้องเลือกคอนแทคเตอร์ตามพิกัด AC-3 กำลังมอเตอร์ แรงดันไฟฟ้า และรอบการทำงานที่ผู้ผลิตกำหนด.
หากคุณกำลังเลือกคอนแทคเตอร์สำหรับมอเตอร์เหนี่ยวนำสามเฟสมาตรฐาน พิกัด AC-3 มักจะเป็นพิกัดแรกที่ต้องตรวจสอบ.
สำหรับการเลือกผลิตภัณฑ์ โปรดดูที่ VIOX คอนแทคเตอร์ไฟฟ้ากระแสสลับ ช่วง.
คอนแทคเตอร์ประเภท AC-4: การใช้งานแบบ Inching, Plugging และ Reversing
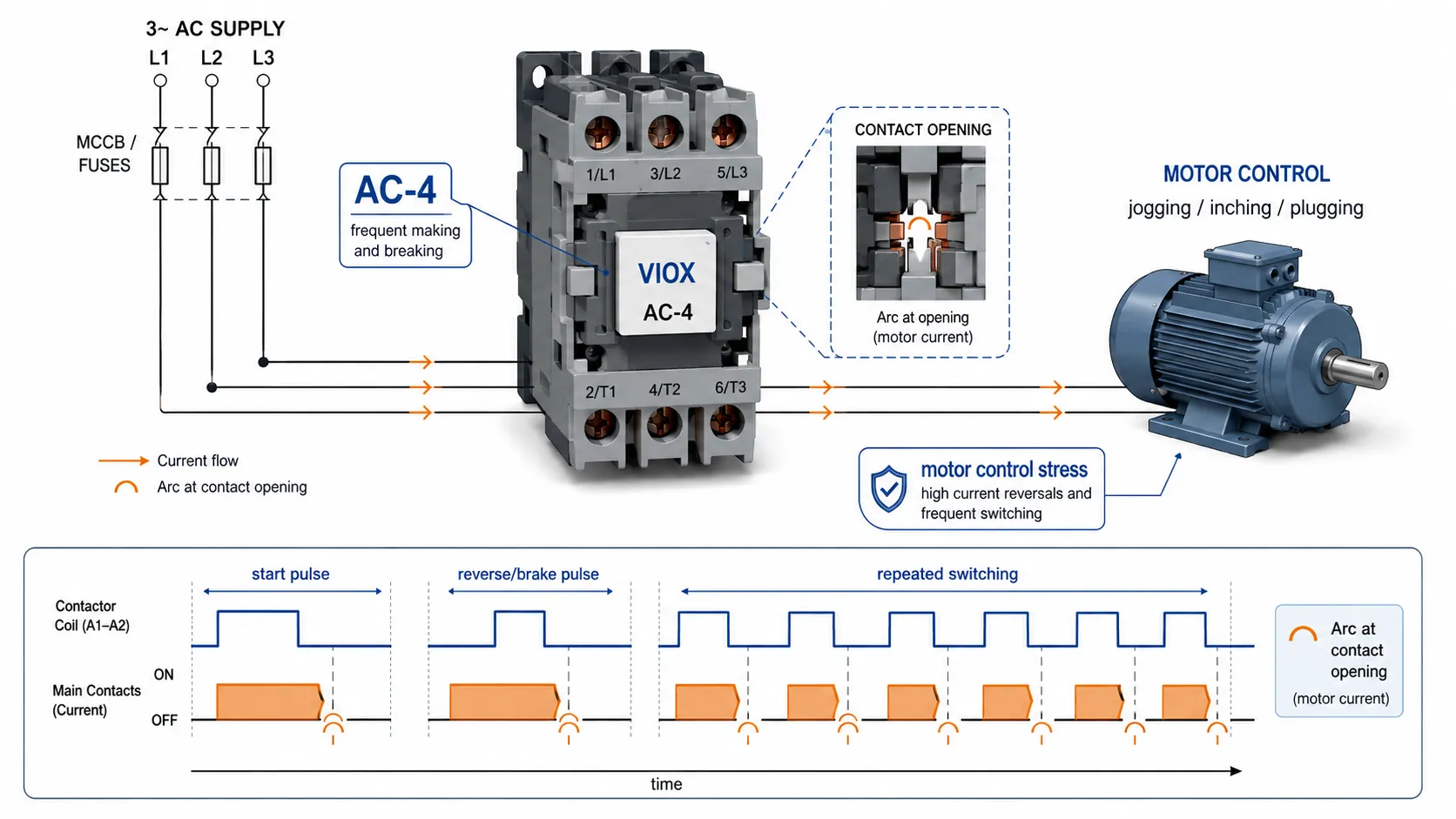
AC-4 ใช้สำหรับงานสวิตชิ่งมอเตอร์ที่มีความหนักหน่วง ครอบคลุมการทำงานประเภท Inching, Plugging, Jogging และ Reversing ในการใช้งานเหล่านี้ คอนแทคเตอร์อาจต้องตัดต่อกระแสไฟฟ้าสูงของมอเตอร์ซ้ำๆ.
การใช้งานทั่วไปของ AC-4 ได้แก่:
- การควบคุมเครน
- การกำหนดตำแหน่งรอก
- วงจรมอเตอร์แบบกลับทางหมุน
- การควบคุมแบบจ็อกกิ้ง (Jog) บ่อยครั้ง
- การเบรกแบบป้อนกระแสย้อนกลับ (Plug braking)
- เครื่องจักรที่ต้องการการเคลื่อนที่ของมอเตอร์แบบสั้นและซ้ำๆ
AC-4 มีความรุนแรงกว่า AC-3 มาก คอนแทคเตอร์ที่ทำงานได้ดีในงานประเภท AC-3 อาจชำรุดเสียหายอย่างรวดเร็วหากใช้งานในประเภท AC-4 โดยไม่ได้เลือกขนาดให้เหมาะสม การสึกหรอของหน้าสัมผัส ความเสียหายจากอาร์ค และการเชื่อมติดของหน้าสัมผัสมีโอกาสเกิดขึ้นได้สูงขึ้น เนื่องจากคอนแทคเตอร์ต้องตัดกระแสไฟฟ้าที่รุนแรงกว่าบ่อยครั้งขึ้น.
ควรใช้ข้อมูลทางเทคนิค AC-4 หรือกราฟอายุการใช้งานทางไฟฟ้าของผู้ผลิตเมื่อเลือกคอนแทคเตอร์สำหรับการใช้งานเหล่านี้.
AC-5 และ AC-6: ระบบแสงสว่าง หม้อแปลงไฟฟ้า และชุดตัวเก็บประจุ (Capacitor Banks)
AC-1 ถึง AC-4 ครอบคลุมการใช้งานฮีตเตอร์และมอเตอร์ส่วนใหญ่ แต่ตู้ควบคุมไฟฟ้าหลายแห่งมีโหลดที่ไม่สามารถจัดอยู่ใน 4 ประเภทนี้ได้อย่างชัดเจน ระบบแสงสว่าง หม้อแปลง และชุดตัวเก็บประจุอาจทำให้เกิดกระแสกระชากสูงหรือความเค้นในการสับเปลี่ยนวงจรแบบพิเศษได้.
| หมวดหมู่ | โหลดทั่วไป | ทำไมมันจึงสำคัญ |
|---|---|---|
| AC-5a | หลอดไฟแบบดิสชาร์จ | วงจรแสงสว่างอาจมีพฤติกรรมของกระแสกระชากและการเกิดอาร์คแบบพิเศษ |
| AC-5b | หลอดไส้ | กระแสกระชากขณะไส้หลอดเย็นอาจสูงกว่ากระแสขณะทำงานปกติมาก |
| AC-6a | หม้อแปลงไฟฟ้า | กระแสกระชากขณะเริ่มจ่ายไฟเข้าหม้อแปลงอาจมีความรุนแรงได้ |
| AC-6b | ชุดตัวเก็บประจุ (Capacitor banks) | การสับสวิตช์ชุดตัวเก็บประจุอาจทำให้เกิดกระแสกระชากสูงและเกิดความเค้นที่หน้าสัมผัส |
สำหรับชุดตัวเก็บประจุ ห้ามเลือกคอนแทคเตอร์มาตรฐาน AC-1 หรือ AC-3 โดยพิจารณาจากกระแสเพียงอย่างเดียว ให้ใช้คอนแทคเตอร์สำหรับงานตัวเก็บประจุ (Capacitor-duty contactor) หรืออุปกรณ์ที่ได้รับการจัดระดับมาเพื่อการสับสวิตช์ตัวเก็บประจุโดยเฉพาะเมื่อการใช้งานต้องการ สำหรับหม้อแปลงและชุดโคมไฟ ให้ตรวจสอบข้อมูลประเภทการใช้งาน (Utilization category) และขีดจำกัดกระแสกระชากจากผู้ผลิต แทนที่จะอนุมานว่ากระแสขณะทำงานปกติเพียงพอแล้ว.
ประเภทการใช้งานไฟฟ้ากระแสตรง (DC Utilization Categories): DC-1, DC-3 และ DC-5
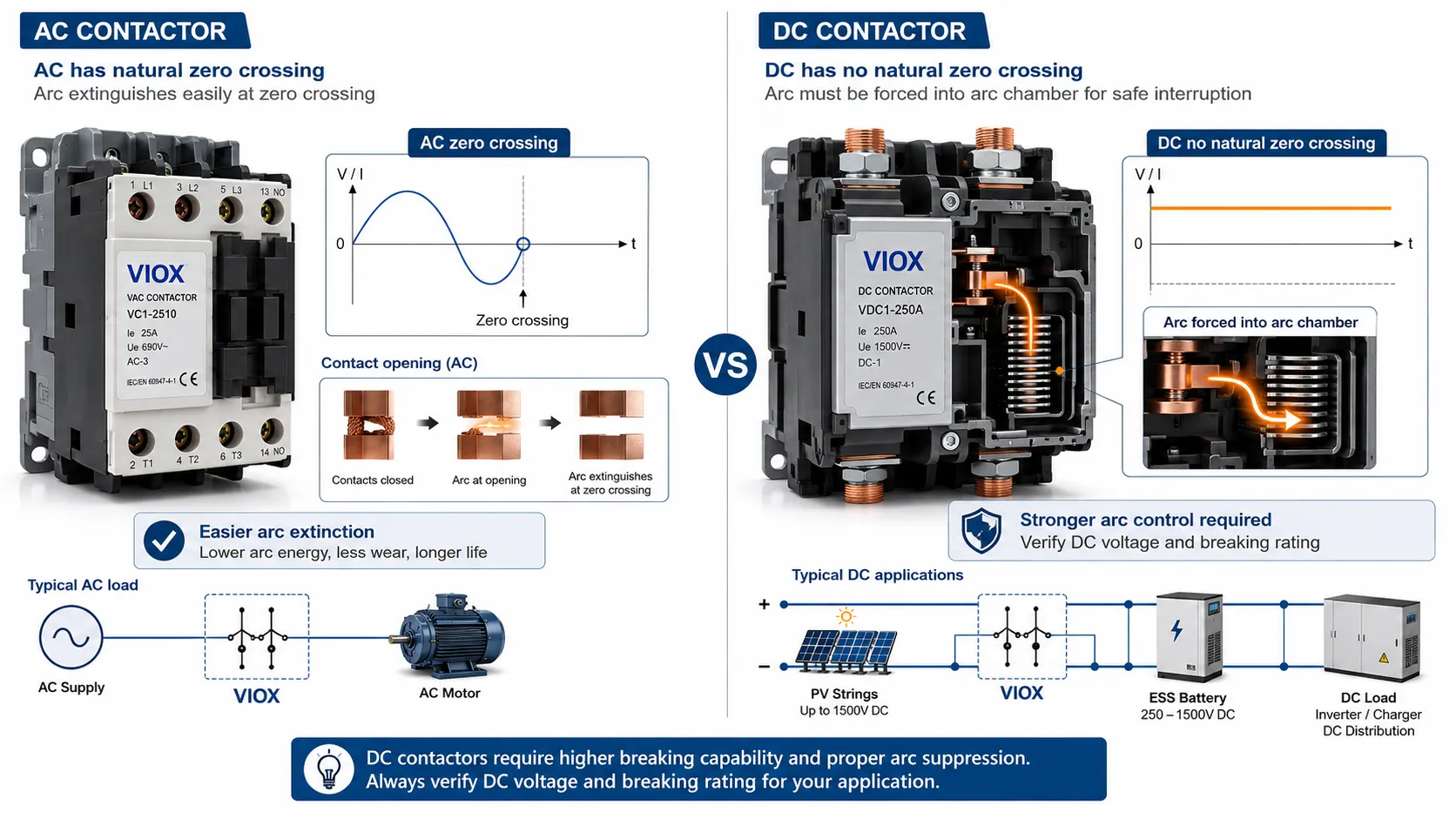
ประเภทของคอนแทคเตอร์ไฟฟ้ากระแสตรง (DC) มีความสำคัญเนื่องจากอาร์กของไฟฟ้ากระแสตรงไม่มีการผ่านจุดศูนย์เหมือนอาร์กของไฟฟ้ากระแสสลับ การสับสวิตช์ไฟฟ้ากระแสตรงมักต้องการการดับอาร์กที่แข็งแกร่งกว่า ระยะห่างหน้าสัมผัสที่กว้างกว่า การเป่าอาร์กด้วยแม่เหล็ก (Magnetic blowout) หรือโครงสร้างหน้าสัมผัสแบบพิเศษ.
| ประเภทของไฟฟ้ากระแสตรง (DC Category) | โหลดทั่วไป | ความหมายเชิงปฏิบัติ |
|---|---|---|
| DC-1 | โหลด DC ที่ไม่มีค่าความเหนี่ยวนำ หรือมีค่าน้อยมาก | การสลับวงจรไฟฟ้ากระแสตรง (DC) ที่ง่ายกว่า |
| DC-3 | มอเตอร์ไฟฟ้ากระแสตรงแบบขนาน (Shunt DC motors) | การสตาร์ท การกลับทางหมุน (Plugging) การเดินเครื่องทีละน้อย (Inching) และการเบรกแบบไดนามิก (Dynamic braking) |
| DC-5 | มอเตอร์ไฟฟ้ากระแสตรงแบบอนุกรม (Series DC motors) | ภาระการสลับกระแสไฟฟ้าของมอเตอร์ไฟฟ้ากระแสตรงที่รุนแรงกว่า |
เอกสารข้อมูลหรือเอกสารอ้างอิงรุ่นเก่าบางฉบับอาจแสดงคำศัพท์ประเภทของไฟฟ้ากระแสตรงเพิ่มเติมหรือแตกต่างออกไป หากมีข้อสงสัย ให้ปฏิบัติตามเอกสารข้อมูลของผู้ผลิตและมาตรฐานของโครงการ สำหรับโหลดไฟฟ้ากระแสตรงสมัยใหม่ เช่น แบตเตอรี่, โซลาร์เซลล์ (PV), ระบบยานยนต์ไฟฟ้า (EV) และระบบกักเก็บพลังงาน ห้ามอนุมานว่าคอนแทคเตอร์ที่จัดระดับสำหรับไฟฟ้ากระแสสลับจะสามารถใช้งานได้.
ระบบโซลาร์เซลล์ (PV), ระบบกักเก็บพลังงาน (ESS) และโหลดไฟฟ้ากระแสตรงแรงดันสูง
สตริงโซลาร์เซลล์, ระบบกักเก็บพลังงานแบตเตอรี่ (ESS) และวงจรจ่ายไฟสำหรับยานยนต์ไฟฟ้า ทำให้เกิดปัญหาในการเลือกอุปกรณ์ที่แตกต่างจากหมวดมอเตอร์กระแสตรงทั่วไป กระแสไฟฟ้าอาจไหลได้สองทิศทาง แรงดันไฟฟ้ากระแสตรงอาจมีค่าสูง และการตัดกระแสไฟฟ้าเมื่อเกิดความผิดปกติทำได้ยากเนื่องจากไม่มีจุดตัดศูนย์ (Zero-crossing) ตามธรรมชาติ.
ผลิตภัณฑ์สำหรับการสวิตช์ไฟฟ้ากระแสตรงและโซลาร์เซลล์บางรายการถูกระบุโดยใช้หมวดหมู่การสวิตช์เฉพาะสำหรับไฟฟ้ากระแสตรงหรือโซลาร์เซลล์ในมาตรฐานผลิตภัณฑ์และเอกสารข้อมูลของตนเอง อย่าทึกทักเอาเองว่าพิกัด DC-1 แบบดั้งเดิมจะครอบคลุมถึงการใช้งานกับอุปกรณ์ตัดตอนสตริงโซลาร์เซลล์, คอนแทคเตอร์แบตเตอรี่ หรืออุปกรณ์ตัดวงจรยานยนต์ไฟฟ้า สำหรับโครงการโซลาร์เซลล์/ESS ให้ตรวจสอบแรงดันไฟฟ้ากระแสตรง, ทิศทางการไหลของกระแส, ค่าคงที่เวลา, ขั้วไฟฟ้า, การป้องกันไฟฟ้าลัดวงจร และพิกัดการใช้งานที่ผู้ผลิตประกาศไว้อย่างละเอียด.
สำหรับความแตกต่างระหว่างการออกแบบคอนแทคเตอร์ไฟฟ้ากระแสสลับและกระแสตรง โปรดดูที่ คู่มือเปรียบเทียบคอนแทคเตอร์ไฟฟ้ากระแสสลับและกระแสตรง.
วิธีการอ่านพิกัด AC-1 และ AC-3 บนแผ่นป้ายชื่อคอนแทคเตอร์
แผ่นป้ายชื่อคอนแทคเตอร์อาจแสดงพิกัดกระแสไฟฟ้าหลายค่า ตัวเลขที่สำคัญจะขึ้นอยู่กับประเภทโหลดของคุณ.
มองหา:
- แรงดันไฟฟ้าใช้งานที่กำหนด เช่น 230V, 400V หรือ 690V
- กระแสไฟฟ้าใช้งานที่กำหนดภายใต้ประเภทการใช้งาน AC-1
- กระแสไฟฟ้าใช้งานที่กำหนดภายใต้ประเภทการใช้งาน AC-3
- พิกัดกำลังมอเตอร์ในหน่วยกิโลวัตต์ (kW) หรือแรงม้า (HP)
- แรงดันไฟฟ้าคอยล์ เช่น 24V DC, 110V AC หรือ 230V AC
- ประเภทการใช้งาน
- ความถี่
- พิกัดของหน้าสัมผัสช่วย (Auxiliary contact)
- แผนผังการเดินสายไฟของผู้ผลิต
- เครื่องหมายที่ขั้วต่อสาย
หากคอนแทคเตอร์ตัวเดียวกันแสดงค่าที่สูงกว่า แน่นอ-1 กระแสไฟฟ้าและค่าที่ต่ำกว่า ซี-3 กระแสไฟฟ้า ค่า AC-1 ไม่ใช่ค่าที่ถูกต้องสำหรับการเลือกใช้งานกับมอเตอร์ เว้นแต่ในเอกสารข้อมูลจะระบุอนุญาตให้ใช้งานในลักษณะนั้นโดยเฉพาะ สำหรับมอเตอร์ ให้ตรวจสอบค่ากระแสไฟฟ้า AC-3 หรือพิกัดกำลังของมอเตอร์.
คู่มือการเลือกคอนแทคเตอร์ตามประเภทโหลด
| เรียกประเภท | ประเภทที่ควรตรวจสอบเป็นอันดับแรก | บันทึกย่อ |
|---|---|---|
| ฮีตเตอร์แบบความต้านทาน | แน่นอ-1 | ตรวจสอบกระแสไฟฟ้า แรงดันไฟฟ้า อุณหภูมิ และรอบการทำงาน |
| มอเตอร์สามเฟสมาตรฐาน | ซี-3 | หน้าที่การทำงานของมอเตอร์ที่พบบ่อยที่สุด |
| มอเตอร์แบบกลับทางหมุน | ข้อมูลการใช้งานประเภท AC-4 หรือการใช้งานพิเศษ | ตรวจสอบความถี่ในการกลับทางหมุนและอายุการใช้งานทางไฟฟ้า |
| มอเตอร์แบบจ็อกกิ้ง/อินชิ่ง (Jogging/Inching) | เอซี-4 | การใช้งานหนัก; ห้ามใช้พิกัด AC-3 โดยไม่พิจารณาข้อมูลอื่น |
| มอเตอร์แบบสลิปริง (Slip-ring motor) | AC-2 | ตรวจสอบประเภทของมอเตอร์และวิธีการสตาร์ท |
| โหลดความต้านทานกระแสตรง (DC resistive load) | DC-1 | ตรวจสอบแรงดันไฟฟ้ากระแสตรงและความสามารถในการตัดกระแสไฟฟ้า |
| มอเตอร์ไฟฟ้ากระแสตรง (DC motor) | DC-3 หรือ DC-5 ขึ้นอยู่กับประเภทของมอเตอร์ | การดับอาร์คไฟฟ้ากระแสตรงมีความสำคัญอย่างยิ่ง |
| แสงสว่างโหลด | AC-5a / AC-5b หรือข้อมูลจากผู้ผลิต | กระแสกระชากอาจสูงขึ้นอยู่กับประเภทของหลอดไฟ |
| แบงค์คาปาซิเตอร์ | AC-6b หรือคอนแทคเตอร์สำหรับงานคาปาซิเตอร์ (capacitor-duty contactor) | ใช้คอนแทคเตอร์สำหรับสวิตช์คาปาซิเตอร์ในกรณีที่จำเป็น |
| หม้อแปลงไฟฟ้า | ตามมาตรฐาน AC-6a หรือข้อมูลจากผู้ผลิต | กระแสกระชากขณะเริ่มเดินเครื่อง (Magnetizing inrush) อาจมีความรุนแรงมาก |
ประเภทการใช้งาน (Category) จะบอกให้ทราบถึงระดับความเครียดทางไฟฟ้าที่คอนแทคเตอร์ถูกออกแบบมาให้รองรับ แต่ไม่สามารถใช้แทนการตรวจสอบข้อมูลในเอกสารทางเทคนิค (Datasheet) ฉบับเต็มได้.
เหตุใดพิกัด AC-1 จึงสูงกว่าพิกัด AC-3
โหลดประเภท AC-1 สวิตช์ได้ง่ายกว่าเนื่องจากเป็นโหลดความต้านทานเป็นหลัก รูปคลื่นกระแสและแรงดันมีความใกล้เคียงกัน และโดยปกติคอนแทคเตอร์ไม่จำเป็นต้องจัดการกับพฤติกรรมการสตาร์ทของมอเตอร์.
โหลดประเภท AC-3 มีความยากกว่าเนื่องจากมอเตอร์จะดึงกระแสกระชากสูงในขณะสตาร์ทและสร้างความเครียดจากการสวิตช์แบบเหนี่ยวนำ แม้ว่ากระแสขณะมอเตอร์ทำงานปกติจะดูไม่สูงมาก แต่คอนแทคเตอร์ต้องสามารถทนต่อพฤติกรรมการตัดและต่อวงจรซ้ำๆ ตามที่กำหนดไว้สำหรับประเภทการใช้งานนั้นได้.
นี่คือเหตุผลที่กระแสพิกัด AC-1 ของคอนแทคเตอร์สามารถสูงกว่ากระแสพิกัด AC-3 ได้มาก ไม่ใช่กลยุทธ์ทางการตลาด แต่เป็นผลมาจากภาระทางไฟฟ้าที่แตกต่างกัน.
ข้อผิดพลาดในการเลือกทั่วไป
ข้อผิดพลาดที่ 1: การใช้กระแสไฟฟ้าแบบ AC-1 กับมอเตอร์
นี่เป็นข้อผิดพลาดที่พบบ่อยที่สุด หากโหลดเป็นมอเตอร์ ให้ตรวจสอบค่า AC-3 หรือประเภทการใช้งานของมอเตอร์โดยเฉพาะ ห้ามเลือกขนาดจากพิกัด AC-1.
ข้อผิดพลาดที่ 2: การเข้าใจว่า AC-3 และ AC-4 เหมือนกัน
AC-4 มีความรุนแรงกว่า AC-3 มาก การกลับทางหมุน การเดินเครื่องแบบจังหวะ (Inching) การเขย่าเครื่อง (Jogging) และการเบรกด้วยไฟฟ้า (Plugging) อาจทำให้อายุการใช้งานทางไฟฟ้าสั้นลง หากคอนแทคเตอร์ไม่ได้ถูกเลือกมาเพื่อการใช้งานประเภทนั้น.
ข้อผิดพลาดที่ 3: การละเลยแรงดันคอยล์
แม้หน้าสัมผัสหลักจะถูกต้อง แต่คอนแทคเตอร์จะไม่ทำงานหากแรงดันคอยล์ไม่ถูกต้อง ควรตรวจสอบประเภทคอยล์ AC/DC และแรงดันควบคุมที่กำหนดเสมอ.
ข้อผิดพลาดที่ 4: การลืมการป้องกันไฟฟ้าลัดวงจร
คอนแทคเตอร์ไม่ใช่เซอร์กิตเบรกเกอร์ จึงต้องมีการประสานการทำงานร่วมกับฟิวส์, MCB, MCCB, เซอร์กิตเบรกเกอร์สำหรับป้องกันมอเตอร์ หรือโอเวอร์โหลดรีเลย์ ขึ้นอยู่กับการออกแบบวงจร.
ข้อผิดพลาดที่ 5: การละเลยเรื่องรอบการทำงาน (Duty Cycle) และความถี่ในการสลับการทำงาน
การทำงานที่บ่อยครั้งจะทำให้เกิดความร้อนและการสึกหรอของหน้าสัมผัส หากการใช้งานมีการสตาร์ทและหยุดหลายครั้งต่อชั่วโมง ให้ตรวจสอบข้อมูลอายุการใช้งานทางไฟฟ้าและความถี่ในการสลับการทำงานจากผู้ผลิต.
ข้อผิดพลาดที่ 6: การใช้คอนแทคเตอร์ AC กับโหลด DC
โหลด DC ต้องการความสามารถในการสลับการทำงานที่รองรับกระแสตรง คอนแทคเตอร์ที่เหมาะสมกับงานมอเตอร์ประเภท AC-3 ไม่ได้หมายความว่าจะเหมาะสมกับวงจรมอเตอร์ DC หรือวงจรแบตเตอรี่โดยอัตโนมัติ.
บันทึกภาคสนามของวิศวกร
เมื่อคอนแทคเตอร์ชำรุดก่อนกำหนด ป้ายชื่ออุปกรณ์มักจะบอกสาเหตุได้ ฮีตเตอร์ที่ต่อผ่านคอนแทคเตอร์ซึ่งเลือกตามมาตรฐาน AC-3 อาจเป็นการเลือกอุปกรณ์ที่เกินความจำเป็นและสิ้นเปลืองค่าใช้จ่าย ส่วนมอเตอร์ที่ต่อผ่านคอนแทคเตอร์ซึ่งเลือกตามมาตรฐาน AC-1 ถือเป็นกรณีที่อันตราย เพราะอาจใช้งานได้ในช่วงทดสอบระบบ แต่หน้าสัมผัสอาจเชื่อมติดกันหลังจากสตาร์ทซ้ำๆ.
สำหรับตู้ควบคุมมอเตอร์ นิสัยที่ดีที่สุดคือการระบุประเภทของโหลดไว้ข้างชื่อคอนแทคเตอร์ในรายการวัสดุ (BOM) เช่น “AC-3 มอเตอร์ปั๊มน้ำ”, “AC-4 งานจ็อกกิ้ง (Jog duty)” หรือ “AC-1 ฮีตเตอร์” บันทึกเล็กๆ น้อยๆ นี้ช่วยป้องกันการเปลี่ยนทดแทนอุปกรณ์ในการจัดซื้อ ซึ่งอาจดูเหมือนกันในแง่ของกระแสไฟฟ้า แต่ไม่เท่ากันในแง่ของประเภทการใช้งาน.
คำถามที่พบบ่อย
ฉันสามารถใช้คอนแทคเตอร์ AC-1 กับมอเตอร์ได้หรือไม่?
ห้ามเลือกคอนแทคเตอร์สำหรับมอเตอร์โดยอ้างอิงจากพิกัด AC-1 สำหรับมอเตอร์กรงกระรอกมาตรฐาน ให้ใช้พิกัด AC-3 หรือพิกัดกำลังมอเตอร์ที่ผู้ผลิตระบุไว้.
AC-3 และ AC-4 มีความแตกต่างกันอย่างไร?
AC-3 คือการสตาร์ทและหยุดมอเตอร์ตามปกติหลังจากที่มอเตอร์ทำงานแล้ว ส่วน AC-4 ครอบคลุมถึงการทำงานที่มีความเค้นสูงบ่อยครั้ง เช่น การกลับทางหมุนหรือการเดินเครื่องแบบจังหวะ (Inching) ซึ่งคอนแทคเตอร์อาจต้องตัดและต่อกระแสไฟฟ้าที่สูงกว่าบ่อยครั้งขึ้น.
เหตุใดคอนแทคเตอร์ตัวเดียวกันจึงมีพิกัดกระแส AC-1 และ AC-3 ที่แตกต่างกัน?
เนื่องจากประเภทของโหลดส่งผลต่อความเค้นของหน้าสัมผัส โหลดประเภทความต้านทาน (Resistive load) จะสลับการทำงานได้ง่ายกว่า ในขณะที่มอเตอร์จะสร้างกระแสกระชาก (Inrush current) และการอาร์กจากความเหนี่ยวนำ หมวดหมู่การใช้งาน (Utilization category) จึงถูกกำหนดขึ้นเพื่อปรับพิกัดการใช้งานให้เหมาะสมกับโหลด.
ฉันควรใช้หมวดหมู่ใดสำหรับชุดตัวเก็บประจุ (Capacitor bank)?
ชุดตัวเก็บประจุต้องการความใส่ใจเป็นพิเศษเนื่องจากสามารถสร้างกระแสกระชากสูงสุดที่สูงมากได้ ให้ตรวจสอบมาตรฐาน AC-6b หรือพิกัดคอนแทคเตอร์สำหรับงานตัวเก็บประจุโดยเฉพาะจากผู้ผลิต แทนการเลือกจากกระแส AC-1 เพียงอย่างเดียว.
ฉันควรใช้หมวดหมู่ใดสำหรับหม้อแปลงไฟฟ้า?
การจ่ายไฟเข้าหม้อแปลงอาจทำให้เกิดกระแสกระชากขณะเริ่มเดินเครื่อง (Magnetizing inrush) สูง ควรตรวจสอบมาตรฐาน AC-6a หรือข้อมูลการสลับวงจรหม้อแปลงจากผู้ผลิต แทนการเลือกขนาดจากกระแสขณะทำงานปกติเพียงอย่างเดียว.
การใช้งาน DC-1 เพียงพอสำหรับการสลับวงจรระบบโซลาร์เซลล์ (PV) หรือแบตเตอรี่หรือไม่?
ไม่เพียงพอโดยอัตโนมัติ วงจรสตริงของโซลาร์เซลล์ ระบบแบตเตอรี่ และระบบกักเก็บพลังงาน (ESS) อาจต้องการพิกัดการสลับวงจรไฟฟ้ากระแสตรง (DC) แบบพิเศษ กฎเรื่องขั้วไฟฟ้า และการรับรองตามเอกสารข้อมูลทางเทคนิคเฉพาะงาน โปรดตรวจสอบแรงดันไฟฟ้ากระแสตรง ทิศทางการไหลของกระแส ค่าคงที่เวลา และพิกัดจากผู้ผลิตให้แน่ชัด.
ฉันจะหาพิกัดของคอนแทคเตอร์ที่ถูกต้องได้จากที่ไหน?
ตรวจสอบที่ป้ายชื่อ (Nameplate) และเอกสารข้อมูลทางเทคนิค (Datasheet) ของคอนแทคเตอร์ โดยดูที่แรงดันไฟฟ้าพิกัด ประเภทการใช้งาน (Utilization category) กระแส AC-1 กระแส AC-3 พิกัดกำลังมอเตอร์ (kW/HP) และแรงดันไฟฟ้าของคอยล์.
สรุป
AC-1, AC-2, AC-3 และ AC-4 ไม่ใช่แค่รหัสเรียกทั่วไป แต่เป็นตัวบ่งบอกว่าคอนแทคเตอร์ถูกออกแบบมาเพื่อสลับวงจรโหลดประเภทใด สำหรับโหลดความต้านทาน (Resistive loads) พิกัด AC-1 มักเป็นค่าหลักที่ใช้ สำหรับมอเตอร์เหนี่ยวนำทั่วไป พิกัด AC-3 คือค่าหลักที่ต้องพิจารณา ส่วนการใช้งานแบบ Inching, Plugging, Jogging หรือการกลับทางหมุน พิกัด AC-4 จำเป็นต้องได้รับความสนใจเป็นพิเศษ สำหรับโหลดไฟฟ้ากระแสตรง (DC) รหัส DC-1, DC-3 และ DC-5 จะช่วยแยกแยะระหว่างโหลดความต้านทานและโหลดมอเตอร์ ซึ่งการดับอาร์คจะทำได้ยากกว่า.
วิธีการเลือกที่ปลอดภัยที่สุดนั้นง่ายมาก คือระบุประเภทของโหลดก่อน จากนั้นจึงเลือกคอนแทคเตอร์ตามประเภทการใช้งาน แรงดันไฟฟ้า กระแสไฟฟ้า แหล่งจ่ายไฟคอยล์ รอบการทำงาน (Duty cycle) และข้อมูลจากผู้ผลิต ห้ามเลือกคอนแทคเตอร์สำหรับมอเตอร์โดยดูจากพิกัดกระแส AC-1 เพียงอย่างเดียว.
