
คำตอบโดยตรง
Trip Class คือระบบการจัดอันดับที่เป็นมาตรฐานซึ่งกำหนดโดย IEC 60947-4-1 และมาตรฐาน NEMA ที่ระบุเวลาสูงสุดที่อุปกรณ์ป้องกันมอเตอร์ (โอเวอร์โหลดรีเลย์ความร้อนหรือเซอร์กิตเบรกเกอร์ป้องกันมอเตอร์) จะใช้ในการทริปและตัดการเชื่อมต่อมอเตอร์เมื่อได้รับ 600% (หรือ 7.2 เท่า) ของกระแสไฟฟ้าที่กำหนด. หมายเลขคลาสจะระบุเวลาทริปสูงสุดเป็นวินาทีโดยตรง—Class 10 จะทริปภายใน 10 วินาที, Class 20 ภายใน 20 วินาที และ Class 30 ภายใน 30 วินาทีที่ระดับโอเวอร์โหลดนี้ การจำแนกประเภทนี้ช่วยให้มั่นใจได้ว่าเวลาตอบสนองของอุปกรณ์ป้องกันจะตรงกับเส้นโค้งความเสียหายจากความร้อนของมอเตอร์ ป้องกันความล้มเหลวของฉนวนขดลวด ในขณะที่หลีกเลี่ยงการทริปที่ไม่พึงประสงค์ในระหว่างสภาวะการสตาร์ทปกติ.
สิ่งสำคัญที่ต้องจดจำ
- ✅ คำจำกัดความของ Trip Class: หมายเลขคลาส (5, 10, 10A, 20, 30) แสดงถึงวินาทีสูงสุดในการทริปที่ 600% (NEMA) หรือ 7.2 เท่า (IEC) ของการตั้งค่ากระแสไฟของรีเลย์ เพื่อให้มั่นใจว่าการป้องกันสอดคล้องกับขีดจำกัดความร้อนของมอเตอร์
- ✅ NEMA vs. IEC Standards: โดยทั่วไปมอเตอร์ NEMA ต้องการการป้องกัน Class 20 (ออกแบบมาสำหรับ Service Factor 1.15 และความจุความร้อนที่แข็งแกร่ง) ในขณะที่มอเตอร์ IEC ต้องการ Class 10 (ได้รับการจัดอันดับตามการใช้งานด้วย Service Factor 1.0 และขอบเขตความร้อนที่เข้มงวดกว่า)
- ✅ เกณฑ์การคัดเลือก: เลือก Class 10 สำหรับการใช้งานที่ต้องการการตอบสนองที่รวดเร็ว (ปั๊มจุ่ม, มอเตอร์ที่ปิดสนิท, มอเตอร์ที่ขับเคลื่อนด้วย VFD), Class 20 สำหรับมอเตอร์ NEMA ทั่วไป และ Class 30 สำหรับโหลดที่มีความเฉื่อยสูงที่ต้องการเวลาเร่งความเร็วที่ยาวนาน
- ✅ การจับคู่เส้นโค้งความเสียหายจากความร้อน: Trip Class ต้องสอดคล้องกับความสามารถในการทนความร้อนของมอเตอร์—การป้องกันที่ไม่ตรงกันอาจทำให้เกิดความล้มเหลวก่อนเวลาอันควร (การป้องกันต่ำเกินไป) หรือการทริปที่ไม่พึงประสงค์ (การป้องกันมากเกินไป)
- ✅ พฤติกรรมการสตาร์ทเย็นเทียบกับสตาร์ทร้อน: เส้นโค้งการทริปจะคำนึงถึงทั้งสภาวะการสตาร์ทเย็น (มอเตอร์ที่อุณหภูมิแวดล้อม, เวลาทริปที่นานขึ้นเป็นที่ยอมรับได้) และสถานการณ์การรีสตาร์ทร้อน (มอเตอร์ใกล้อุณหภูมิการทำงาน, ต้องการการป้องกันที่เร็วกว่า)
ทำความเข้าใจ Trip Class: รากฐานของการป้องกันมอเตอร์
Trip Class หมายถึงอะไรจริงๆ
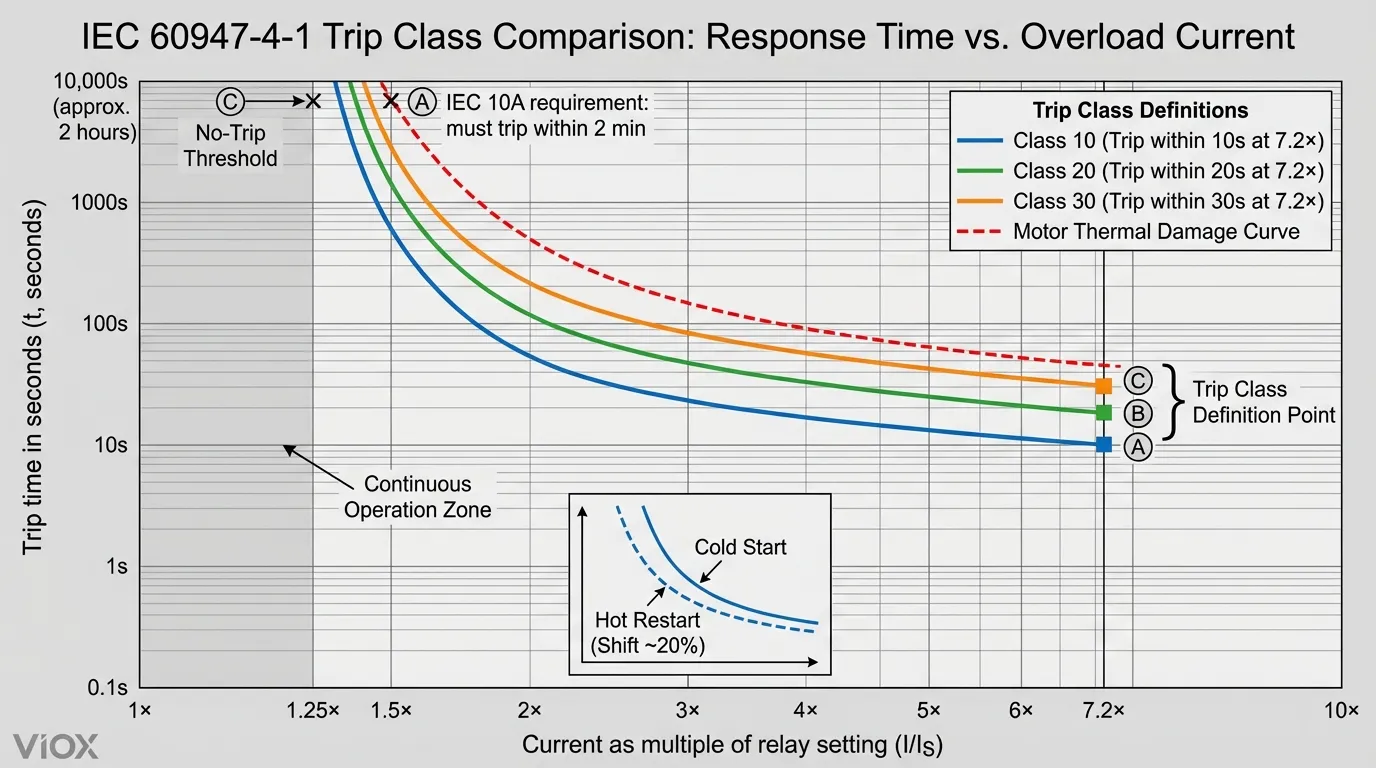
Trip Class ไม่ได้เป็นเพียงข้อกำหนดด้านเวลาเท่านั้น แต่แสดงถึงความสัมพันธ์ที่ได้รับการออกแบบมาอย่างพิถีพิถันระหว่างลักษณะการตอบสนองของอุปกรณ์ป้องกันและความสามารถของมอเตอร์ในการทนต่อความเค้นจากความร้อน ตามมาตรฐาน IEC 60947-4-1, Trip Class กำหนดจุดปฏิบัติงานที่สำคัญสองจุดที่สร้างเส้นโค้งการป้องกันที่สมบูรณ์:
จุดนิยามหลัก (กระแสสูง):
- มาตรฐาน NEMA: ทริปภายในเวลาคลาส (วินาที) ที่ 600% ของการตั้งค่ารีเลย์
- มาตรฐาน IEC: ทริปภายในเวลาคลาส (วินาที) ที่ 7.2 เท่าของการตั้งค่ารีเลย์
จุดนิยามรอง (โอเวอร์โหลดปานกลาง):
- ที่ 125% ของการตั้งค่า: ต้องไม่ทริปภายใน 2 ชั่วโมง (สตาร์ทเย็น)
- ที่ 150% ของการตั้งค่า: ต้องทริปภายในเวลาที่กำหนดตามคลาส (IEC 10A: <2 นาที)
คำจำกัดความแบบสองจุดนี้สร้างเส้นโค้งลักษณะผกผันกับเวลาที่สะท้อนถึงโปรไฟล์ความเสียหายจากความร้อนของมอเตอร์—ยิ่งโอเวอร์โหลดสูงเท่าใด การตอบสนองการทริปก็จะยิ่งเร็วขึ้นเท่านั้น.
ฟิสิกส์เบื้องหลังการเลือก Trip Class
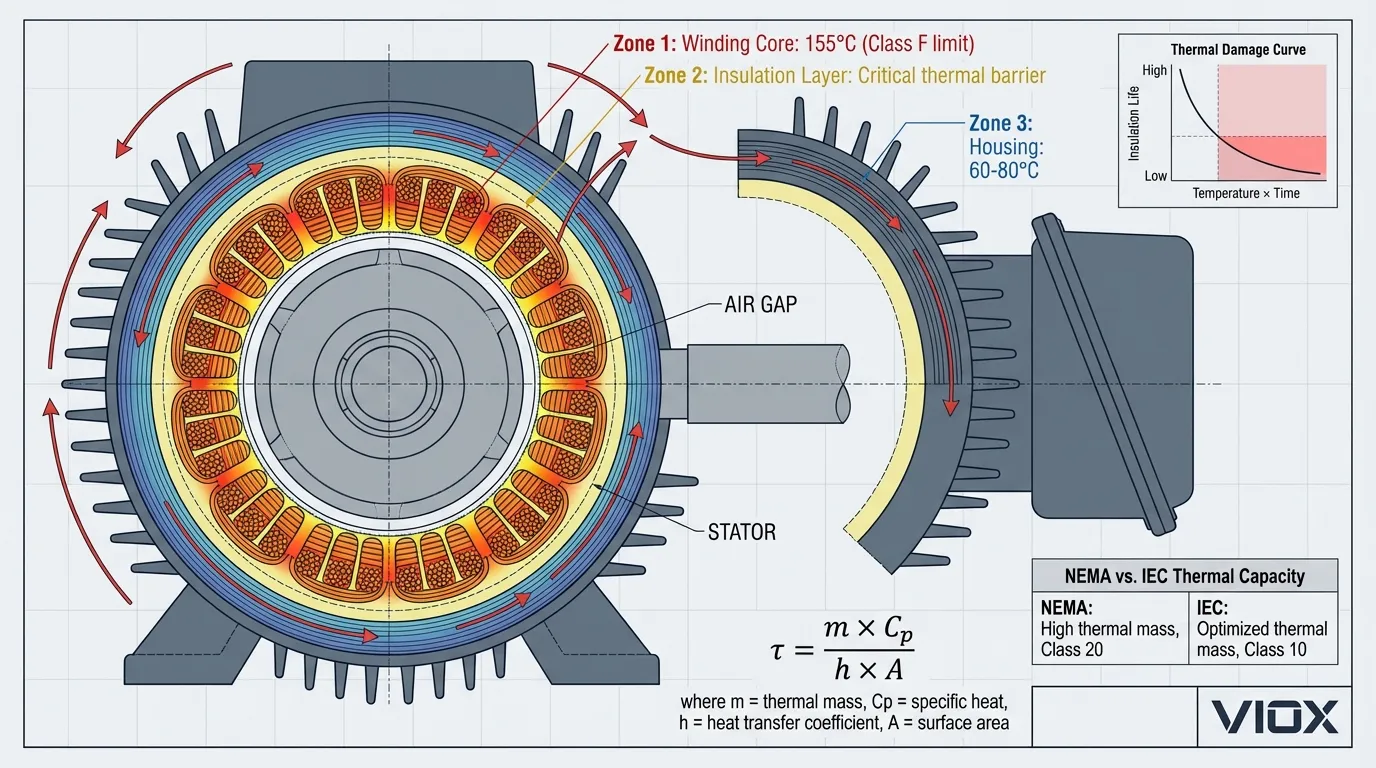
ฉนวนขดลวดมอเตอร์เป็นไปตาม “กฎ 10 องศา”—สำหรับทุกๆ 10°C ที่สูงกว่าอุณหภูมิที่กำหนด อายุการใช้งานของฉนวนจะลดลงครึ่งหนึ่ง ในระหว่างสภาวะโอเวอร์โหลด ความร้อน I²R ในขดลวดจะเพิ่มขึ้นแบบทวีคูณตามกระแสไฟฟ้า Trip Class ต้องตรวจสอบให้แน่ใจว่าอุปกรณ์ป้องกันขัดจังหวะกระแสไฟฟ้าก่อนที่พลังงานความร้อนสะสม (∫ I²·t dt) จะเกินความสามารถในการทนความร้อนของมอเตอร์2ความสัมพันธ์ของค่าคงที่เวลาความร้อน:.
> τ
τใช้เครื่องยนต์ × ส่วนต่างความปลอดภัยส่งต่อ = ค่าคงที่เวลาความร้อนของมอเตอร์ (โดยทั่วไปคือ 30-60 นาทีสำหรับมอเตอร์แบบปิด)
ที่ไหน:
- τใช้เครื่องยนต์ = ค่าคงที่เวลาความร้อนของรีเลย์ (แตกต่างกันไปตามคลาส)
- τส่งต่อ ส่วนต่างความปลอดภัย = โดยทั่วไปคือ 1.2-1.5 เท่า เพื่อชดเชยความแปรปรวนของสภาพแวดล้อม
- Trip Class มาตรฐาน: การเปรียบเทียบที่สมบูรณ์
IEC 60947-4-1 Trip Classes
Trip Class
| เวลาทริปที่ 7.2 เท่าของ I | ความเข้ากันได้ของประเภทมอเตอร์r | คิดถึงเรื่องโปรแกรม | Class 5 |
|---|---|---|---|
| ≤5 วินาที | การป้องกันที่รวดเร็วเป็นพิเศษสำหรับมอเตอร์ที่ไวต่อความร้อน | คอมเพรสเซอร์แบบปิดสนิท, ปั๊มจุ่มขนาดเล็ก | Class 10 |
| ≤10 วินาที | มอเตอร์ IEC มาตรฐาน, การใช้งาน VFD | มอเตอร์ IEC Design N, มอเตอร์ระบายความร้อนด้วยอากาศ, โหลดที่ตอบสนองอย่างรวดเร็ว | Class 10A |
| ≤10 วินาที ที่ 7.2 เท่า | ≤2 นาที ที่ 1.5 เท่า การป้องกันที่เพิ่มขึ้นสำหรับสภาวะการรีสตาร์ทร้อน |
มอเตอร์ IEC ที่มีการสตาร์ท/หยุดบ่อยครั้ง | Class 20 |
| ≤20 วินาที | มอเตอร์ NEMA ทั่วไป | มอเตอร์ NEMA Design A/B ที่มี 1.15 SF, การใช้งานทางอุตสาหกรรมมาตรฐาน | Class 30 |
| ≤30 วินาที | โหลดที่มีความเฉื่อยสูง, การเร่งความเร็วที่ยาวนาน | มอเตอร์สำหรับงานโรงสี, เครื่องบด, พัดลมขนาดใหญ่, เครื่องหมุนเหวี่ยง | มาตรฐาน NEMA Trip Class |
มาตรฐาน NEMA สอดคล้องกับคำจำกัดความของ IEC แต่ใช้ 600% (6 เท่า) แทน 7.2 เท่า เป็นจุดอ้างอิง ความแตกต่างในทางปฏิบัติมีน้อย—ทั้งสองระบบให้เส้นโค้งการป้องกันที่เทียบเท่ากัน
NEMA standards align with IEC definitions but use 600% (6×) instead of 7.2× as the reference point. The practical difference is negligible—both systems produce equivalent protection curves.
ข้อควรพิจารณาที่สำคัญเฉพาะ NEMA:
- การครอบงำของ Class 20: มอเตอร์ NEMA ประมาณ 85% ถูกออกแบบมาสำหรับการป้องกัน Class 20 เนื่องจากปัจจัยการใช้งานมาตรฐาน 1.15 และการออกแบบทางความร้อนที่แข็งแกร่ง
- เวลาโรเตอร์ล็อค: NEMA MG-1 กำหนดให้มอเตอร์ ≤500 HP สามารถทนต่อกระแสโรเตอร์ล็อคได้ ≥12 วินาทีที่อุณหภูมิการทำงานปกติ ซึ่งสอดคล้องกับการป้องกัน Class 20
- ปฏิสัมพันธ์ของปัจจัยการใช้งาน: มอเตอร์ที่มี SF 1.15 สามารถรองรับการโอเวอร์โหลดต่อเนื่อง 115% ได้ ซึ่งต้องใช้เส้นโค้งการตัดวงจรที่ไม่รบกวนความสามารถนี้
คู่มือการเลือก Trip Class: การจับคู่การป้องกันกับแอปพลิเคชัน
เมทริกซ์การตัดสินใจ: คุณต้องการ Trip Class ใด
| ลักษณะเฉพาะของมอเตอร์ | Trip Class ที่แนะนำ | เหตุผล |
|---|---|---|
| NEMA Design A/B, 1.15 SF | ≤20 วินาที | ความจุความร้อนมาตรฐาน, ทนต่อโรเตอร์ล็อค 12-20 วินาที |
| IEC Design N, 1.0 SF | ≤10 วินาที | พิกัดตามแอปพลิเคชัน, ขอบความร้อนที่แคบกว่า, ทนต่อโรเตอร์ล็อค 10 วินาที |
| มอเตอร์ปั๊มน้ำแบบจุ่ม | Class 10 หรือ Class 5 | ระบายความร้อนด้วยของเหลว, ความร้อนสูงขึ้นอย่างรวดเร็วเมื่อการไหลหยุด |
| มอเตอร์ที่ขับเคลื่อนด้วย VFD | ≤10 วินาที | ลดการระบายความร้อนที่ความเร็วต่ำ, ไม่มีปัจจัยการใช้งานเมื่อป้อนด้วยอินเวอร์เตอร์ |
| โหลดความเฉื่อยสูง (>5 วินาทีในการเร่งความเร็ว) | ≤30 วินาที | เวลาเริ่มต้นที่ยาวนานขึ้น, ป้องกันการตัดวงจรที่น่ารำคาญ |
| การเริ่ม/หยุดบ่อย (>10 รอบ/ชั่วโมง) | ≤10 วินาที ที่ 7.2 เท่า | การป้องกันการรีสตาร์ทแบบร้อน, การตัดวงจร 2 นาทีที่ 150% |
| มอเตอร์ที่ปิดผนึกอย่างแน่นหนา | Class 5 หรือ Class 10 | ไม่มีการระบายความร้อนภายนอก, อุณหภูมิสูงขึ้นอย่างรวดเร็ว |
สถานการณ์แอปพลิเคชันที่สำคัญ
สถานการณ์ที่ 1: ปั๊มหอยโข่งที่มีมอเตอร์ NEMA 15 HP
ข้อมูลจำเพาะของมอเตอร์:
- กระแสไฟฟ้าเต็มพิกัด (FLA): 20A
- ปัจจัยการใช้งาน: 1.15
- กระแสโรเตอร์ล็อค: 120A (6× FLA)
- เวลาเร่งความเร็ว: 3 วินาที
การวิเคราะห์:
- ระยะเวลาโรเตอร์ล็อค (3 วินาที) < เวลาตัดวงจร Class 20 (20 วินาที) → ✅ ไม่มีการตัดวงจรที่น่ารำคาญ
- มอเตอร์ NEMA Design B → มาตรฐาน Class 20
- 1.15 SF อนุญาตให้ 23A ต่อเนื่องโดยไม่มีการตัดวงจร
การเลือก: รีเลย์โอเวอร์โหลดความร้อน Class 20, ตั้งค่าที่ 20A
สถานการณ์ที่ 2: ปั๊มน้ำบาดาลแบบจุ่มที่มีมอเตอร์ 5 HP
ข้อมูลจำเพาะของมอเตอร์:
- กระแสไฟฟ้าเต็มพิกัด: 14A
- ปัจจัยการใช้งาน: 1.0 (ไม่มี SF สำหรับแบบจุ่ม)
- กระแสโรเตอร์ล็อค: 84A (6× FLA)
- การระบายความร้อน: ขึ้นอยู่กับการไหลของน้ำ
การวิเคราะห์:
- การสูญเสียการไหลของน้ำ = ความร้อนสูงเกินไปอย่างรวดเร็ว (ไม่มีการระบายความร้อนภายนอก)
- ต้องการการป้องกันที่รวดเร็วเพื่อป้องกันการไหม้
- ผู้ผลิตระบุการป้องกัน Class 10
การเลือก: รีเลย์โอเวอร์โหลดความร้อน Class 10, ตั้งค่าที่ 14A
สถานการณ์ที่ 3: โรงสีลูกบอลที่มีมอเตอร์ 200 HP (ความเฉื่อยสูง)
ข้อมูลจำเพาะของมอเตอร์:
- กระแสไฟฟ้าเต็มพิกัด: 240A
- เวลาเร่งความเร็ว: 18 วินาที
- กระแสโรเตอร์ล็อค: 1,440A (6× FLA)
- ประเภทโหลด: ความเฉื่อยสูง, ค่าคงที่เวลาทางกล >10 วินาที
การวิเคราะห์:
- เวลาเร่งความเร็ว (18 วินาที) > เวลาตัดวงจร Class 20 (20 วินาที) → ⚠️ ขอบเขตจำกัด
- เวลาเร่งความเร็ว (18 วินาที) < เวลาตัดวงจร Class 30 (30 วินาที) → ✅ ขอบเขตปลอดภัย
- ความเฉื่อยสูงต้องมีการเผื่อเวลาเริ่มต้นที่ยาวนานขึ้น
การเลือก: รีเลย์โอเวอร์โหลดความร้อน Class 30, ตั้งค่าที่ 240A
การป้องกันมอเตอร์ NEMA เทียบกับ IEC: ทำความเข้าใจความแตกต่างพื้นฐาน
การเปรียบเทียบปรัชญาการออกแบบ
| ด้าน | มอเตอร์ NEMA | มอเตอร์ IEC |
|---|---|---|
| แนวทางการออกแบบ | อนุรักษ์นิยม, ออกแบบมากเกินไปเพื่อความอเนกประสงค์ | เฉพาะแอปพลิเคชัน, ปรับให้เหมาะสมสำหรับหน้าที่ที่แน่นอน |
| Service Factor (ตัวประกอบการใช้งาน) | โดยทั่วไป 1.15 (ความสามารถในการรับโหลดเกินต่อเนื่อง 15%) | โดยทั่วไป 1.0 (ไม่มีค่าเผื่อโหลดเกิน) |
| Thermal Capacity (ความจุความร้อน) | มวลความร้อนสูง, ระบบฉนวนที่แข็งแกร่ง | การออกแบบทางความร้อนที่เหมาะสม, ความจุส่วนเกินน้อยที่สุด |
| Standard Trip Class (คลาสการตัดวงจรมาตรฐาน) | Class 20 (20 วินาที ที่ 600% ของ FLA) | Class 10 (10 วินาที ที่ 7.2× I)r) |
| Locked-Rotor Withstand (ความทนทานต่อโรเตอร์ล็อค) | ≥12 วินาที (NEMA MG-1 สำหรับ ≤500 HP) | ~10 วินาที (IEC 60034-12) |
| ระดับฉนวน | โดยทั่วไป Class F (155°C) โดยมีอุณหภูมิเพิ่มขึ้น Class B | โดยทั่วไป Class F โดยมีอุณหภูมิเพิ่มขึ้น Class F |
| กระแสไฟเริ่มต้น | 6-7× FLA (NEMA Design B) | 5-8× In (IEC Design N) |
Why IEC Motors Require Faster Protection (ทำไมมอเตอร์ IEC จึงต้องการการป้องกันที่เร็วกว่า)
IEC motors are designed with tighter thermal margins because they’re engineered for specific applications rather than general-purpose use. This “application rating” philosophy means: (มอเตอร์ IEC ได้รับการออกแบบโดยมีค่าเผื่อความร้อนที่เข้มงวดกว่า เนื่องจากได้รับการออกแบบมาสำหรับการใช้งานเฉพาะมากกว่าการใช้งานทั่วไป ปรัชญา "การให้คะแนนแอปพลิเคชัน" นี้หมายความว่า:)
- No Service Factor Buffer (ไม่มีบัฟเฟอร์ Service Factor): An IEC motor rated for 10 kW delivers exactly 10 kW continuously—no 15% overload margin like NEMA 1.15 SF motors (: มอเตอร์ IEC ที่ได้รับการจัดอันดับ 10 kW จะส่งมอบ 10 kW อย่างแม่นยำอย่างต่อเนื่อง—ไม่มีค่าเผื่อโหลดเกิน 15% เช่นเดียวกับมอเตอร์ NEMA 1.15 SF)
- Optimized Cooling (การระบายความร้อนที่เหมาะสม): Cooling systems are sized precisely for rated load, not over-designed (: ระบบระบายความร้อนมีขนาดที่แม่นยำสำหรับโหลดที่กำหนด ไม่ได้ออกแบบมากเกินไป)
- Faster Thermal Response (การตอบสนองต่อความร้อนที่เร็วกว่า): Lower thermal mass means temperature rises more quickly during overload (: มวลความร้อนที่ต่ำกว่าหมายถึงอุณหภูมิสูงขึ้นอย่างรวดเร็วในระหว่างการโอเวอร์โหลด)
- Global Efficiency Standards (มาตรฐานประสิทธิภาพระดับโลก): IEC IE3/IE4 efficiency requirements drive tighter thermal designs (: ข้อกำหนดด้านประสิทธิภาพ IEC IE3/IE4 ขับเคลื่อนการออกแบบทางความร้อนที่เข้มงวดขึ้น)
Practical implication (ความหมายในทางปฏิบัติ): Using a Class 20 relay on an IEC motor can allow 10-20 seconds of damaging overload before tripping—potentially exceeding the motor’s 10-second thermal limit. (: การใช้รีเลย์ Class 20 กับมอเตอร์ IEC สามารถทำให้เกิดการโอเวอร์โหลดที่เป็นอันตราย 10-20 วินาทีก่อนที่จะตัดวงจร ซึ่งอาจเกินขีดจำกัดความร้อน 10 วินาทีของมอเตอร์).
Cold Start vs. Hot Restart: The Hidden Complexity (การสตาร์ทเย็นเทียบกับการรีสตาร์ทร้อน: ความซับซ้อนที่ซ่อนอยู่)
Thermal State Impact on Trip Behavior (ผลกระทบของสถานะความร้อนต่อพฤติกรรมการตัดวงจร)
Trip class specifications are based on (ข้อกำหนดคลาสการตัดวงจรขึ้นอยู่กับ) cold-start conditions (สภาวะการสตาร์ทเย็น)—the motor and protection device are both at ambient temperature. However, real-world applications involve hot restarts after recent operation, fundamentally changing the protection dynamics. (—มอเตอร์และอุปกรณ์ป้องกันทั้งคู่อยู่ที่อุณหภูมิแวดล้อม อย่างไรก็ตาม แอปพลิเคชันในโลกแห่งความเป็นจริงเกี่ยวข้องกับการรีสตาร์ทแบบร้อนหลังจากการทำงานล่าสุด ซึ่งเปลี่ยนแปลงไดนามิกของการป้องกันโดยพื้นฐาน).
Cold Start Characteristics: (ลักษณะการสตาร์ทเย็น:)
- Motor windings at ambient temperature (~40°C) (ขดลวดมอเตอร์ที่อุณหภูมิแวดล้อม (~40°C))
- Full thermal capacity available (ความจุความร้อนเต็มที่)
- Longer acceptable overload duration (ระยะเวลาโอเวอร์โหลดที่ยอมรับได้นานขึ้น)
- Trip curve follows published specifications (เส้นโค้งการตัดวงจรเป็นไปตามข้อกำหนดที่เผยแพร่)
Hot Restart Characteristics: (ลักษณะการรีสตาร์ทร้อน:)
- Motor windings near operating temperature (~120-155°C) (ขดลวดมอเตอร์ใกล้อุณหภูมิการทำงาน (~120-155°C))
- Reduced thermal capacity (already partially “used”) (ลดความจุความร้อน (ใช้ไปแล้วบางส่วน))
- Shorter safe overload duration (ระยะเวลาโอเวอร์โหลดที่ปลอดภัยสั้นลง)
- Trip curve shifts left (faster tripping) (เส้นโค้งการตัดวงจรเลื่อนไปทางซ้าย (การตัดวงจรเร็วขึ้น))
IEC Class 10A: The Hot-Restart Solution (IEC Class 10A: โซลูชันการรีสตาร์ทแบบร้อน)
IEC 60947-4-1 defines Class 10A specifically to address hot-restart protection inadequacies in standard Class 10/20 relays. The key difference: (IEC 60947-4-1 กำหนด Class 10A โดยเฉพาะเพื่อแก้ไขปัญหาการป้องกันการรีสตาร์ทแบบร้อนที่ไม่เพียงพอในรีเลย์ Class 10/20 มาตรฐาน ความแตกต่างที่สำคัญ:)
| เงื่อนไข | Standard Class 20 (Class 20 มาตรฐาน) | IEC Class 10A (IEC Class 10A) |
|---|---|---|
| At 7.2× I (ที่ 7.2× I)r (cold) (เย็น) | มอเตอร์ NEMA ทั่วไป | มอเตอร์ IEC มาตรฐาน, การใช้งาน VFD |
| At 1.5× I (ที่ 1.5× I)r (hot) (ร้อน) | ~8 minutes (~8 นาที) | ≤2 minutes (≤2 นาที) |
| โปรแกรม | วัตถุประสงค์ทั่วไป | Frequent start/stop, cyclic duty (การสตาร์ท/หยุดบ่อย, หน้าที่แบบวนรอบ) |
Why this matters (ทำไมเรื่องนี้ถึงสำคัญ): A motor running at full load reaches thermal equilibrium at ~120°C (Class F insulation). If it trips on overload and immediately restarts, a 150% overload can damage insulation within 2 minutes. Standard Class 20 relays may take 4-8 minutes to trip at this level, allowing thermal damage. Class 10A ensures protection within 2 minutes. (: มอเตอร์ที่ทำงานที่โหลดเต็มที่จะถึงสมดุลทางความร้อนที่ ~120°C (ฉนวน Class F) หากตัดวงจรเนื่องจากการโอเวอร์โหลดและรีสตาร์ททันที การโอเวอร์โหลด 150% สามารถทำลายฉนวนได้ภายใน 2 นาที รีเลย์ Class 20 มาตรฐานอาจใช้เวลา 4-8 นาทีในการตัดวงจรในระดับนี้ ทำให้เกิดความเสียหายจากความร้อน Class 10A ช่วยให้มั่นใจได้ถึงการป้องกันภายใน 2 นาที).
Motor Protection Circuit Breakers (MPCBs) vs. Thermal Overload Relays (เซอร์กิตเบรกเกอร์ป้องกันมอเตอร์ (MPCB) เทียบกับรีเลย์โอเวอร์โหลดความร้อน)
Technology Comparison (การเปรียบเทียบเทคโนโลยี)
| คุณสมบัติ | Thermal Overload Relay (TOR) (รีเลย์โอเวอร์โหลดความร้อน (TOR)) | Motor Protection Circuit Breaker (MPCB) (เซอร์กิตเบรกเกอร์ป้องกันมอเตอร์ (MPCB)) |
|---|---|---|
| กลไกการเดินทาง | Bimetallic strip or eutectic alloy heating (แถบไบเมทัลลิกหรือการให้ความร้อนด้วยโลหะผสมยูเทคติก) | Magnetic (instantaneous) + thermal (overload) (แม่เหล็ก (ทันที) + ความร้อน (โอเวอร์โหลด)) |
| Trip Class Availability (ความพร้อมใช้งานของคลาสการตัดวงจร) | คงที่ (เฉพาะอุปกรณ์) หรือปรับได้ (อิเล็กทรอนิกส์) | คงที่หรือปรับได้ (ชุดปลดวงจรแบบอิเล็กทรอนิกส์) |
| การป้องกันการลัดวงจร | ❌ ไม่ (ต้องใช้เบรกเกอร์/ฟิวส์แยกต่างหาก) | ✅ ใช่ (มีชุดปลดวงจรแม่เหล็กในตัว) |
| การตรวจจับการสูญเสียเฟส | ✅ ใช่ (มีอยู่ในดีไซน์ 3 เฟส) | ✅ ใช่ (รุ่นอิเล็กทรอนิกส์) |
| ความสามารถในการปรับเปลี่ยน | ตั้งค่ากระแสได้, คลาสโดยทั่วไปคงที่ | ปรับกระแส + คลาสได้ (รุ่นอิเล็กทรอนิกส์) |
| วิธีการรีเซ็ต | แบบแมนนวลหรืออัตโนมัติ | แบบแมนนวล (กลไก trip-free) |
| คิดถึงเรื่องโปรแกรม | สตาร์ทเตอร์แบบคอนแทคเตอร์, การใช้งานตามมาตรฐาน IEC | อุปกรณ์ป้องกันมอเตอร์แบบสแตนด์อโลน, แบบผสมผสาน NEMA/IEC |
| มาตรฐาน | IEC 60947-4-1 (TOR), NEMA ICS 2 | IEC 60947-4-1 (MPSD), IEC 60947-2 (เบรกเกอร์) |
เมื่อใดควรใช้เทคโนโลยีแต่ละประเภท
เลือกใช้โอเวอร์โหลดรีเลย์แบบความร้อนเมื่อ:
- ใช้สตาร์ทเตอร์มอเตอร์แบบคอนแทคเตอร์ (การกำหนดค่ามาตรฐาน IEC/NEMA)
- มีการป้องกันการลัดวงจรโดยเบรกเกอร์หรือฟิวส์ต้นทาง
- การใช้งานที่คำนึงถึงต้นทุน
- การเปลี่ยน/ปรับปรุงระบบคอนแทคเตอร์ที่มีอยู่
เลือกใช้เซอร์กิตเบรกเกอร์ป้องกันมอเตอร์เมื่อ:
- ต้องการการป้องกันแบบบูรณาการ (โอเวอร์โหลด + ลัดวงจร) ในอุปกรณ์เดียว
- ข้อจำกัดด้านพื้นที่ (MPCB มีขนาดกะทัดรัดกว่าคอนแทคเตอร์ + TOR + เบรกเกอร์)
- การสตาร์ทแบบ Direct-on-line (DOL) โดยไม่ต้องใช้คอนแทคเตอร์
- ต้องการการสับสวิตช์ด้วยมือบ่อยครั้ง (MPCB มีฟังก์ชันตัดการเชื่อมต่อในตัว)
ข้อผิดพลาดทั่วไปในการเลือกคลาสทริปและแนวทางแก้ไข
ข้อผิดพลาดที่ 1: การใช้การป้องกันคลาส 20 กับมอเตอร์ IEC
อาการ: มอเตอร์เสียก่อนเวลาอันควร, ฉนวนขดลวดเสียหาย, ไม่มีการทริปเกิดขึ้น
สาเหตุหลัก: มอเตอร์ IEC ออกแบบมาสำหรับการป้องกันคลาส 10 (ขีดจำกัดความร้อน 10 วินาที) แต่ได้รับการป้องกันโดยรีเลย์คลาส 20 (เวลาทริป 20 วินาที) ช่องว่าง 10 วินาทีทำให้เกิดความเสียหายจากความร้อนได้.
ทางออก:
- ตรวจสอบข้อกำหนดคลาสทริปของผู้ผลิตมอเตอร์เสมอ (ตรวจสอบเอกสารประกอบหรือแผ่นป้ายชื่อมอเตอร์)
- เมื่อเปลี่ยนมอเตอร์ NEMA เป็นมอเตอร์ IEC ที่เทียบเท่ากัน ให้ตรวจสอบความเข้ากันได้ของคลาสทริป
- ใช้โอเวอร์โหลดรีเลย์แบบอิเล็กทรอนิกส์ที่ปรับคลาสทริปได้เพื่อความยืดหยุ่น
ข้อผิดพลาดที่ 2: รีเลย์คลาส 10 ทำให้เกิดการทริปที่ผิดพลาดในมอเตอร์ NEMA
อาการ: มอเตอร์ทริปในระหว่างการสตาร์ทตามปกติ โดยเฉพาะอย่างยิ่งกับโหลดที่มีความเฉื่อยสูง
สาเหตุหลัก: มอเตอร์ NEMA Design B ที่มีเวลาเร่งความเร็ว 18 วินาที ได้รับการป้องกันโดยรีเลย์คลาส 10 (ทริป 10 วินาที) กระแสขณะโรเตอร์ถูกล็อค (6× FLA) เกินเกณฑ์การทริปก่อนที่มอเตอร์จะถึงความเร็วเต็มที่.
ทางออก:
- คำนวณเวลาเร่งความเร็วจริง: taccel = (J · ω) / (Tใช้เครื่องยนต์ – Tload)
- ตรวจสอบให้แน่ใจว่า: taccel < 0.8 × tคลาสทริป (ระยะปลอดภัย 20%)
- สำหรับกรณีนี้: ใช้รีเลย์คลาส 20 หรือคลาส 30
ข้อผิดพลาดที่ 3: การละเลยสภาวะ Hot-Restart
อาการ: มอเตอร์เสียหลังจากรอบการสตาร์ท/หยุดอย่างรวดเร็วหลายครั้ง แม้ว่าการป้องกัน cold-start จะถูกต้อง
สาเหตุหลัก: การหมุนเวียนบ่อยครั้งทำให้มอเตอร์มีอุณหภูมิสูง รีเลย์คลาส 20 มาตรฐานอนุญาตให้ 8 นาทีที่โอเวอร์โหลด 150% (สภาวะร้อน) แต่มอเตอร์สามารถทนได้เพียง 2 นาที.
ทางออก:
- สำหรับการใช้งานที่มี >6 สตาร์ท/ชั่วโมง: ใช้การป้องกัน IEC คลาส 10A
- ใช้การหน่วงเวลาปิดเครื่องขั้นต่ำ (ปล่อยให้มอเตอร์เย็นลงระหว่างการสตาร์ท)
- พิจารณารีเลย์อิเล็กทรอนิกส์ตามแบบจำลองความร้อนที่ติดตามประวัติอุณหภูมิของมอเตอร์
ข้อผิดพลาดที่ 4: การตั้งค่ากระแสรีเลย์ให้มีขนาดใหญ่เกินไป
อาการ: มอเตอร์ทำงานร้อนอย่างต่อเนื่อง, ฉนวนล้มเหลวในที่สุด, รีเลย์ไม่เคยทริป
สาเหตุหลัก: รีเลย์ตั้งไว้ที่ 25A สำหรับมอเตอร์ 20A (125% ของ FLA) โหลดต่อเนื่อง 23A (115% ของมอเตอร์ FLA) ไม่เคยถึงเกณฑ์การทริปของรีเลย์.
ทางออก:
- ตั้งค่ากระแสรีเลย์เป็น FLA ของแผ่นป้ายชื่อมอเตอร์ (ไม่ใช่กระแส service factor)
- สำหรับมอเตอร์ 20A ที่มี 1.15 SF: ตั้งค่ารีเลย์เป็น 20A ไม่ใช่ 23A
- เส้นโค้งการทริปของรีเลย์ที่ 125% (25A) จะยังคงอนุญาตให้มีการทำงานของ service factor โดยไม่มีการทริปที่ผิดพลาด
เทคโนโลยีคลาสทริปแบบอิเล็กทรอนิกส์ vs. ความร้อน
รีเลย์ความร้อนแบบไบเมทัลลิก/อัลลอยยูเทคติก
วิธีการทำงาน:
- กระแสไหลผ่านองค์ประกอบความร้อน
- แถบไบเมทัลลิกงอเนื่องจากการขยายตัวทางความร้อนที่แตกต่างกัน
- กลไกเชื่อมโยงจะทริปหน้าสัมผัสรีเลย์เมื่อถึงเกณฑ์การโก่งตัว
ลักษณะเฉพาะของคลาสทริป:
- คลาสทริปแบบคงที่ (เฉพาะอุปกรณ์, ไม่สามารถเปลี่ยนแปลงได้)
- การชดเชยอุณหภูมิแวดล้อม (แถบไบเมทัลลิกชดเชยโดยธรรมชาติ)
- หน่วยความจำความร้อน (เก็บความร้อนไว้หลังจากทริป, ส่งผลต่อเวลาการรีเซ็ต)
- ความแม่นยำของเส้นโค้งการตัดวงจร: ±10-20% (ความคลาดเคลื่อนทางกล)
ข้อดี:
- ไม่ต้องใช้พลังงานจากภายนอก
- ทนทานต่อสัญญาณรบกวนทางไฟฟ้า/EMI
- เทคโนโลยีที่เรียบง่ายและได้รับการพิสูจน์แล้ว
- ต้นทุนต่ำกว่า
ข้อเสีย :
- คลาสการตัดวงจรแบบคงที่ (ต้องมีรีเลย์หลายประเภทในสต็อก)
- ตอบสนองต่อการโอเวอร์โหลดอย่างรวดเร็วได้ช้ากว่า
- การสึกหรอทางกลเมื่อเวลาผ่านไป
- ความสามารถในการวินิจฉัยที่จำกัด
โอเวอร์โหลดรีเลย์อิเล็กทรอนิกส์
วิธีการทำงาน:
- หม้อแปลงกระแส (CTs) วัดกระแสไฟฟ้าของมอเตอร์
- ไมโครโปรเซสเซอร์คำนวณแบบจำลองความร้อน: θ(t) = θ0 + ∫ [(I2 – Irated2) / τ] dt
- ตัดวงจรเมื่ออุณหภูมิที่คำนวณได้เกินเกณฑ์
ลักษณะเฉพาะของคลาสทริป:
- เลือกคลาสการตัดวงจรได้ (คลาส 5, 10, 10A, 15, 20, 30 ผ่าน DIP switch หรือซอฟต์แวร์)
- แบบจำลองความร้อนแบบดิจิทัล (ติดตามอุณหภูมิของมอเตอร์อย่างต่อเนื่อง)
- การชดเชยการรีสตาร์ทแบบร้อน (จดจำสถานะความร้อนหลังจากไฟฟ้าดับ)
- ความแม่นยำของเส้นโค้งการตัดวงจร: ±5% (ความแม่นยำแบบดิจิทัล)
ข้อดี:
- อุปกรณ์เดียวครอบคลุมคลาสการตัดวงจรหลายคลาส (ลดสินค้าคงคลัง)
- การวินิจฉัยขั้นสูง (กระแสไม่สมดุล, เฟสหาย, ไฟฟ้าลงดิน)
- ความสามารถในการสื่อสาร (Modbus, Profibus, EtherNet/IP)
- คุณสมบัติที่ตั้งโปรแกรมได้ (เกณฑ์การเตือน, การหน่วงเวลาการตัดวงจร)
ข้อเสีย :
- ต้องใช้แหล่งจ่ายไฟควบคุม
- ซับซ้อนกว่า (ต้นทุนเริ่มต้นสูงกว่า)
- อ่อนไหวต่อสัญญาณรบกวนทางไฟฟ้า (ต้องมีการต่อสายดินที่เหมาะสม)
- อาจต้องมีการอัปเดตเฟิร์มแวร์
คลาสการตัดวงจรและการประสานงานของมอเตอร์: Type 1 vs. Type 2
ประเภทการประสานงาน IEC 60947-4-1
ระบบป้องกันมอเตอร์ต้องประสานงานกับอุปกรณ์ป้องกันการลัดวงจร (ฟิวส์หรือเซอร์กิตเบรกเกอร์) เพื่อให้แน่ใจว่ามีการขัดจังหวะความผิดพลาดที่ปลอดภัย คลาสการตัดวงจรมีผลต่อการประสานงานนี้:
การประสานงาน Type 1:
- ภายใต้สภาวะการลัดวงจร คอนแทคเตอร์หรือสตาร์ทเตอร์อาจได้รับความเสียหาย
- ไม่เป็นอันตรายต่อบุคคลหรือการติดตั้ง
- อาจต้องซ่อมแซมหรือเปลี่ยนใหม่ก่อนรีสตาร์ท
- ผลกระทบของคลาสการตัดวงจร: น้อยที่สุด—เน้นที่การป้องกันการลัดวงจร ไม่ใช่การโอเวอร์โหลด
การประสานงาน Type 2:
- ภายใต้สภาวะการลัดวงจร คอนแทคเตอร์หรือสตาร์ทเตอร์ไม่ได้รับความเสียหาย (ยกเว้นการเชื่อมติดของหน้าสัมผัสที่เป็นไปได้)
- ไม่เป็นอันตรายต่อบุคคลหรือการติดตั้ง
- อุปกรณ์พร้อมใช้งานหลังจากการแก้ไขข้อผิดพลาด
- ผลกระทบของคลาสการตัดวงจร: มีนัยสำคัญ—โอเวอร์โหลดรีเลย์ต้องตัดวงจรก่อนที่หน้าสัมผัสของคอนแทคเตอร์จะเชื่อมติด
ตัวอย่างการประสานงาน:
| มอเตอร์ FLA | เวลาทริปที่ 7.2 เท่าของ I | ฟิวส์ต้นทาง | ประเภทการประสานงาน | กระแสไฟผิดพลาดสูงสุด |
|---|---|---|---|---|
| 32เอ | ≤10 วินาที | ฟิวส์ 63A gG | ประเภทที่ 2 | 50 kA |
| 32เอ | ≤20 วินาที | ฟิวส์ 63A gG | ประเภทที่ 2 | 50 kA |
| 32เอ | ≤30 วินาที | ฟิวส์ 80A gG | ประเภท 1 | 50 kA |
ข้อมูลเชิงลึกที่สำคัญ: คลาสการตัดวงจรที่ช้ากว่า (คลาส 30) อาจต้องใช้ฟิวส์ขนาดใหญ่กว่าเพื่อให้เกิดการประสานงาน ซึ่งอาจส่งผลเสียต่อประสิทธิภาพของ Type 2 ผู้ผลิตจัดทำตารางการประสานงานที่ระบุขนาดฟิวส์สูงสุดสำหรับแต่ละคลาสการตัดวงจร.
ลิงก์ภายในและแหล่งข้อมูลที่เกี่ยวข้อง
เพื่อความเข้าใจที่ครอบคลุมเกี่ยวกับระบบป้องกันมอเตอร์และส่วนประกอบทางไฟฟ้าที่เกี่ยวข้อง โปรดสำรวจคู่มือทางเทคนิคของ VIOX เหล่านี้:
- รีเลย์โอเวอร์โหลดความร้อนคืออะไร: คู่มือฉบับสมบูรณ์สำหรับอุปกรณ์ป้องกันมอเตอร์ – เจาะลึกเทคโนโลยีโอเวอร์โหลดรีเลย์ความร้อน ประเภท และเกณฑ์การเลือก
- คู่มือโอเวอร์โหลดรีเลย์ NEMA Class 20 vs. IEC Class 10 – การเปรียบเทียบโดยละเอียดของมาตรฐานการป้องกันมอเตอร์ NEMA และ IEC
- คอนแทคเตอร์ vs. สตาร์ทเตอร์มอเตอร์: ทำความเข้าใจความแตกต่างที่สำคัญ – เรียนรู้วิธีที่คอนแทคเตอร์และโอเวอร์โหลดรีเลย์ทำงานร่วมกันในการควบคุมมอเตอร์
- วิธีการเลือกคอนแทคเตอร์และเบรกเกอร์วงจรตามกำลังมอเตอร์ – คู่มือการปรับขนาดเชิงปฏิบัติสำหรับระบบป้องกันมอเตอร์ที่สมบูรณ์
- มาตรฐานทางไฟฟ้าสำหรับคอนแทคเตอร์: ทำความเข้าใจหมวดหมู่การใช้งาน AC1, AC2, AC3, AC4 – คู่มือที่ครอบคลุมเกี่ยวกับหมวดหมู่การใช้งาน IEC 60947-4-1
คำถามที่พบบ่อย: การเลือกและการใช้งานคลาสการตัดวงจร
Q1: ฉันสามารถใช้โอเวอร์โหลดรีเลย์คลาส 10 กับมอเตอร์ NEMA ที่ได้รับการจัดอันดับสำหรับคลาส 20 ได้หรือไม่
เป็: ในทางเทคนิคทำได้ แต่ไม่แนะนำสำหรับการใช้งานส่วนใหญ่ ในขณะที่รีเลย์คลาส 10 ให้การป้องกันที่เร็วกว่า (อาจเป็นประโยชน์) แต่อาจทำให้เกิดการตัดวงจรที่ไม่พึงประสงค์ระหว่างการสตาร์ทตามปกติ โดยเฉพาะอย่างยิ่งสำหรับโหลดที่มีความเฉื่อยสูงหรือมอเตอร์ที่มีเวลาเร่งความเร็ว >8 วินาที มอเตอร์ NEMA ได้รับการออกแบบมาเพื่อจัดการกับความเค้นจากความร้อนที่เกี่ยวข้องกับการป้องกันคลาส 20 (ทนทาน 20 วินาทีที่ 600% FLA) ดังนั้นการใช้คลาส 10 จึงไม่ได้ให้ขอบเขตความปลอดภัยเพิ่มเติม—เพียงแต่เพิ่มความเสี่ยงของการตัดวงจรที่ไม่ต้องการ ข้อควรระวัง: หากผู้ผลิตมอเตอร์แนะนำคลาส 10 โดยเฉพาะ (เช่น สำหรับการทำงานของ VFD หรือรอบการทำงานพิเศษ) ให้ปฏิบัติตามคำแนะนำของพวกเขา.
Q2: ฉันจะกำหนดคลาสการตัดวงจรที่ถูกต้องได้อย่างไร หากป้ายชื่อมอเตอร์ไม่ได้ระบุไว้
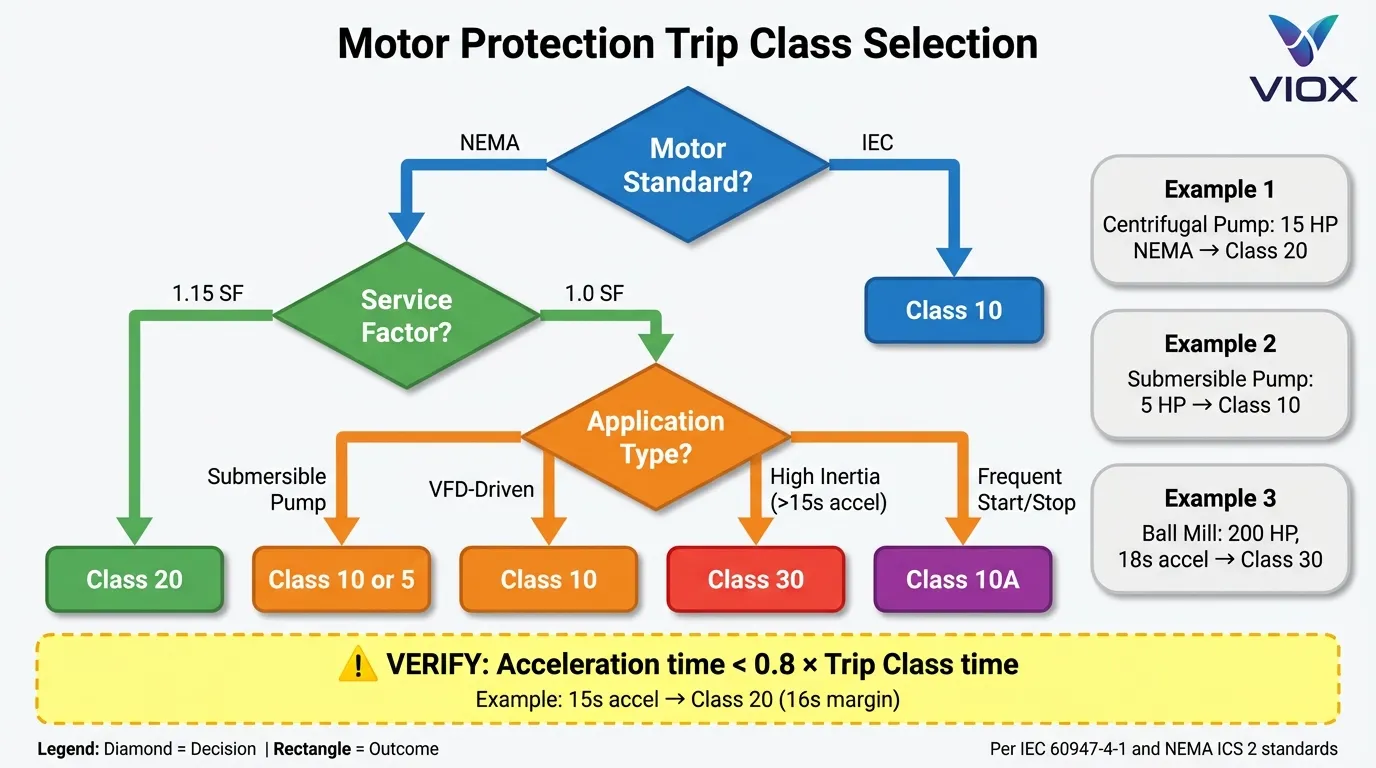
เป็: ทำตามแผนผังการตัดสินใจนี้:
- ตรวจสอบแหล่งที่มาของมอเตอร์: มอเตอร์ NEMA (อเมริกาเหนือ) → Class 20; มอเตอร์ IEC (ยุโรป/เอเชีย) → Class 10
- ตรวจสอบ Service Factor: 1.15 SF → Class 20; 1.0 SF → Class 10
- ตรวจสอบประเภทการใช้งาน:
- ปั๊มน้ำแบบจุ่ม → Class 10 หรือ Class 5
- มอเตอร์ที่ขับเคลื่อนด้วย VFD → Class 10
- โหลดที่มีความเฉื่อยสูง (อัตราเร่ง >15 วินาที) → Class 30
- อุตสาหกรรมทั่วไป → Class 20
- ปรึกษาผู้ผลิต: หากไม่แน่ใจ ให้ติดต่อผู้ผลิตมอเตอร์พร้อมหมายเลขประจำเครื่อง—พวกเขาสามารถให้ Trip Class ที่แนะนำตามข้อกำหนดในการออกแบบได้.
Q3: จะเกิดอะไรขึ้นถ้าฉันใช้ Trip Class ที่ไม่ถูกต้อง
เป็: โหมดความล้มเหลวสองแบบ:
- การป้องกันต่ำเกินไป (Class ช้าเกินไป): มอเตอร์ได้รับความเสียหายจากความร้อนก่อนที่รีเลย์จะตัดวงจร ตัวอย่าง: รีเลย์ Class 20 บนมอเตอร์ Class 10 อนุญาตให้มีการโอเวอร์โหลดที่เป็นอันตราย 10-20 วินาที ผลลัพธ์: อายุการใช้งานของมอเตอร์สั้นลง ฉนวนเสียหาย และความล้มเหลวในที่สุด.
- การป้องกันมากเกินไป (Class เร็วเกินไป): รีเลย์ตัดวงจรระหว่างการทำงานปกติ ทำให้เกิดการหยุดทำงานที่ไม่จำเป็น ตัวอย่าง: รีเลย์ Class 10 บนโหลดที่มีความเฉื่อยสูงพร้อมอัตราเร่ง 18 วินาที ผลลัพธ์: มอเตอร์ไม่เคยถึงความเร็วเต็มที่ การหยุดทำงานของการผลิต ผู้ปฏิบัติงานหงุดหงิดที่อาจเลี่ยงการป้องกัน (อันตราย).
Q4: รีเลย์โอเวอร์โหลดอิเล็กทรอนิกส์ให้การป้องกันที่ดีกว่ารีเลย์ความร้อนหรือไม่
เป็: ไม่จำเป็นต้อง “ดีกว่า” แต่มีความยืดหยุ่นและแม่นยำกว่า รีเลย์อิเล็กทรอนิกส์มี:
- Trip Class ที่ปรับได้ (อุปกรณ์เดียว = หลายการใช้งาน)
- ความแม่นยำสูงขึ้น (±5% vs. ±15% สำหรับความร้อน)
- การวินิจฉัยขั้นสูง (กระแสไม่สมดุล, ไฟฟ้าลงดิน, สถานะความร้อน)
- การสื่อสาร (การตรวจสอบระยะไกล, การบำรุงรักษาเชิงคาดการณ์)
อย่างไรก็ตาม รีเลย์ความร้อนมีข้อดี:
- ไม่ต้องใช้พลังงานจากภายนอก (จ่ายไฟด้วยตัวเองโดยกระแสไฟของมอเตอร์)
- ภูมิคุ้มกันต่อสัญญาณรบกวนทางไฟฟ้า (สำคัญในสภาพแวดล้อม EMI ที่รุนแรง)
- ต้นทุนต่ำกว่า (สำหรับการใช้งานที่เรียบง่ายและคงที่)
คำแนะนำ: ใช้รีเลย์อิเล็กทรอนิกส์สำหรับการใช้งานที่สำคัญ โหลดที่เปลี่ยนแปลงได้ หรือที่ต้องการการวินิจฉัย/การสื่อสาร ใช้รีเลย์ความร้อนสำหรับการใช้งานที่คำนึงถึงต้นทุน การใช้งานแบบคงที่ ซึ่งให้ความสำคัญกับความเรียบง่าย.
Q5: อุณหภูมิแวดล้อมมีผลต่อประสิทธิภาพของ Trip Class อย่างไร
เป็: อุณหภูมิแวดล้อมส่งผลโดยตรงต่อเวลาในการตัดวงจร เนื่องจากทั้งมอเตอร์และอุปกรณ์ป้องกันได้รับผลกระทบ:
ด้านมอเตอร์:
- อุณหภูมิแวดล้อมสูงขึ้น → ความจุความร้อนที่ใช้ได้น้อยลง → อุณหภูมิสูงขึ้นเร็วขึ้น
- พิกัดมาตรฐาน: อุณหภูมิแวดล้อม 40°C (IEC/NEMA)
- ต้องลดพิกัดเมื่อสูงกว่า 40°C (โดยทั่วไป 1% ต่อ °C ที่สูงกว่า 40°C)
ด้านรีเลย์:
- รีเลย์ไบเมทัลลิก: ชดเชยโดยธรรมชาติ (แถบไบเมทัลลิกตอบสนองต่อความร้อนจากสภาพแวดล้อม + โหลด)
- รีเลย์อิเล็กทรอนิกส์: ต้องมีการตั้งค่าการชดเชยอุณหภูมิแวดล้อม (หลายตัวมีเซ็นเซอร์อุณหภูมิในตัว)
ตัวอย่าง: มอเตอร์ในสภาพแวดล้อม 50°C (สูงกว่ามาตรฐาน 10°C) มีความจุความร้อนน้อยกว่า ~10% ต้องตั้งค่ารีเลย์ให้ต่ำกว่า 10% (18A แทนที่จะเป็น 20A สำหรับมอเตอร์ 20A) หรือต้องลดพิกัดมอเตอร์เป็น 18A สำหรับการทำงานต่อเนื่อง Trip Class ยังคงเหมือนเดิม แต่เกณฑ์กระแสไฟเปลี่ยนไป.
สรุป
Trip Class เป็นมากกว่าข้อกำหนดด้านเวลาอย่างง่าย—แสดงถึงการเชื่อมโยงที่สำคัญระหว่างลักษณะทางความร้อนของมอเตอร์และการตอบสนองของอุปกรณ์ป้องกัน การทำความเข้าใจความแตกต่างของ Class 5, 10, 10A, 20 และ 30 ช่วยให้วิศวกรสามารถออกแบบระบบควบคุมมอเตอร์ที่ป้องกันทั้งความล้มเหลวร้ายแรงและการตัดวงจรที่ไม่จำเป็นซึ่งมีค่าใช้จ่ายสูง.
หลักการออกแบบที่สำคัญที่ควรจดจำ:
- จับคู่การป้องกันกับการออกแบบมอเตอร์: มอเตอร์ NEMA (Class 20) และมอเตอร์ IEC (Class 10) มีความจุความร้อนที่แตกต่างกันโดยพื้นฐาน—การป้องกันที่ไม่ตรงกันจะลดทอนความปลอดภัยหรือความน่าเชื่อถือ
- พิจารณารอบการทำงานในโลกแห่งความเป็นจริง: ข้อกำหนดการสตาร์ทเย็นไม่ได้บอกเรื่องราวทั้งหมด—สภาวะการรีสตาร์ทแบบร้อน (การหมุนเวียนบ่อย) อาจต้องมีการป้องกันที่เร็วกว่า (Class 10A)
- ตรวจสอบความเข้ากันได้ของเวลาเร่ง: คำนวณเวลาเร่งมอเตอร์จริงและตรวจสอบให้แน่ใจว่าน้อยกว่า 80% ของเวลา Trip Class เพื่อป้องกันการตัดวงจรที่ไม่จำเป็น
- ใช้ประโยชน์จากเทคโนโลยีที่ทันสมัย: รีเลย์โอเวอร์โหลดอิเล็กทรอนิกส์ที่มี Trip Class ที่ปรับได้ให้ความยืดหยุ่น การวินิจฉัย และความแม่นยำที่รีเลย์ความร้อนแบบคงที่ไม่สามารถเทียบได้
- ประสานงานกับการป้องกันต้นทาง: การเลือก Trip Class มีผลต่อการประสานงาน Type 1/Type 2 กับฟิวส์และเซอร์กิตเบรกเกอร์—ปรึกษาตารางการประสานงานของผู้ผลิต
ในขณะที่มาตรฐานประสิทธิภาพของมอเตอร์เข้มงวดขึ้นทั่วโลก (IEC IE4, IE5 ในอนาคต) ขอบเขตความร้อนยังคงลดลง ทำให้การเลือก Trip Class ที่เหมาะสมมีความสำคัญมากกว่าที่เคย แนวโน้มไปสู่มอเตอร์ที่ได้รับการจัดอันดับการใช้งานตามสไตล์ IEC—แม้ในตลาดอเมริกาเหนือ—หมายความว่าวิศวกรต้องเข้าใจทั้งปรัชญาการป้องกัน NEMA และ IEC เพื่อระบุระบบที่ให้ความน่าเชื่อถือในระยะยาว.
เกี่ยวกับ VIOX Electric: VIOX Electric เป็นผู้ผลิตอุปกรณ์ไฟฟ้า B2B ชั้นนำ โดยเชี่ยวชาญด้านเซอร์กิตเบรกเกอร์ป้องกันมอเตอร์ (MPCB), รีเลย์โอเวอร์โหลดความร้อน, คอนแทคเตอร์ และโซลูชันการควบคุมมอเตอร์ที่ครอบคลุมสำหรับการใช้งานในอุตสาหกรรมและเชิงพาณิชย์ ทีมวิศวกรของเราให้การสนับสนุนด้านเทคนิคสำหรับการออกแบบระบบป้องกันมอเตอร์ การเลือก Trip Class และการศึกษาการประสานงาน. ติดต่อเรา สำหรับคำแนะนำเฉพาะสำหรับการใช้งานและความช่วยเหลือในการเลือกผลิตภัณฑ์.
