
ໂຮງງານຢຸດເຮັດວຽກເວລາ 2 ໂມງເຊົ້າ. ອີກແລ້ວ.
ເມື່ອທ່ານໄປຮອດ, ພະນັກງານບຳລຸງຮັກສາໄດ້ກວດສອບ VFD ແລ້ວ, ກວດສອບ contactor, ຢືນຢັນ relay ladder. ມໍເຕີແມ່ນດີ. PLC ແມ່ນດີ. ທຸກຢ່າງແມ່ນດີ ຍົກເວັ້ນການຜະລິດໄດ້ຢຸດເຊົາເປັນເວລາສາມຊົ່ວໂມງ ແລະຜູ້ຈັດການໂຮງງານຂອງທ່ານກຳລັງຄິດໄລ່ລາຍຮັບທີ່ສູນເສຍຕໍ່ນາທີ. ຫຼັງຈາກນັ້ນ, ບາງຄົນສັງເກດເຫັນສະວິດເລືອກຄູ່ມືຢູ່ໃນປະຕູແຜງ - ສະວິດ cam ສາມຕໍາແຫນ່ງທີ່ຊ່ວຍໃຫ້ຜູ້ປະຕິບັດການເລືອກລະຫວ່າງໂຫມດອັດຕະໂນມັດ, jog ຄູ່ມື, ແລະການປີ້ນກັບມໍເຕີ. ຕໍາແຫນ່ງ 2 ບໍ່ໄດ້ຕິດຕໍ່ອີກຕໍ່ໄປ. ກົນໄກ cam ພາຍໃນໄດ້ສວມໃສ່ບໍ່ສະເຫມີກັນ, ແລະໃນປັດຈຸບັນລໍາດັບການປ່ຽນທີ່ເຮັດວຽກຢ່າງບໍ່ມີຂໍ້ບົກພ່ອງເປັນເວລາຫ້າປີໄດ້ພັດທະນາຈຸດຕາຍ.
ສະວິດ Cam ເບິ່ງຄືວ່າງ່າຍດາຍ. ຫັນມືຈັບ, ວົງຈອນປ່ຽນ. ແຕ່ລະຫວ່າງການຈັດການຕິດຕໍ່ທີ່ສາມາດຄວບຄຸມວົງຈອນເອກະລາດຫຼາຍສິບວົງຈອນພ້ອມໆກັນ, ການຕັ້ງຄ່າເສົາທີ່ກໍານົດວ່າທ່ານກໍາລັງປ່ຽນໄລຍະດຽວຫຼືສາມໄລຍະ, ການຈັດອັນດັບໄຟຟ້າທີ່ປ່ຽນແປງຢ່າງຫຼວງຫຼາຍລະຫວ່າງ AC ແລະ DC, ແລະການອອກແບບກົນຈັກທີ່ໃຊ້ໄດ້ຫນຶ່ງລ້ານຮອບວຽນຫຼືລົ້ມເຫລວໃນຫົກເດືອນ, ມີຫຼາຍກວ່ານີ້ກ່ວາຕາເຫັນ.
ນີ້ແມ່ນຄູ່ມືຄົບຖ້ວນຂອງທ່ານເພື່ອເຂົ້າໃຈສະວິດ cam - ຈາກຫຼັກການເຮັດວຽກພື້ນຖານຈົນເຖິງເງື່ອນໄຂການຄັດເລືອກຕົວຈິງທີ່ປ້ອງກັນການໂທຫາເວລາ 2 ໂມງເຊົ້າ.
ສະວິດ Cam ແມ່ນຫຍັງ?

ສະວິດ cam - ເຊິ່ງເອີ້ນກັນວ່າສະວິດ cam rotary ຫຼືສະວິດ cam-operated - ແມ່ນສະວິດໄຟຟ້າຫຼາຍຕໍາແຫນ່ງທີ່ດໍາເນີນການດ້ວຍມືທີ່ໃຊ້ກົນໄກ cam rotating ເພື່ອເປີດແລະປິດວົງຈອນຫຼາຍໃນລໍາດັບສະເພາະ, ກໍານົດໄວ້ລ່ວງຫນ້າ. ບໍ່ເຫມືອນກັບ toggle ງ່າຍດາຍຫຼືປຸ່ມກົດທີ່ຄວບຄຸມຫນຶ່ງວົງຈອນ, ສະວິດ cam ສາມາດຈັດການພ້ອມໆກັນໄດ້ທຸກບ່ອນຈາກສອງຫາຫຼາຍກວ່າສິບເສັ້ນທາງໄຟຟ້າເອກະລາດດ້ວຍການຫັນມືຈັບຄັ້ງດຽວ.
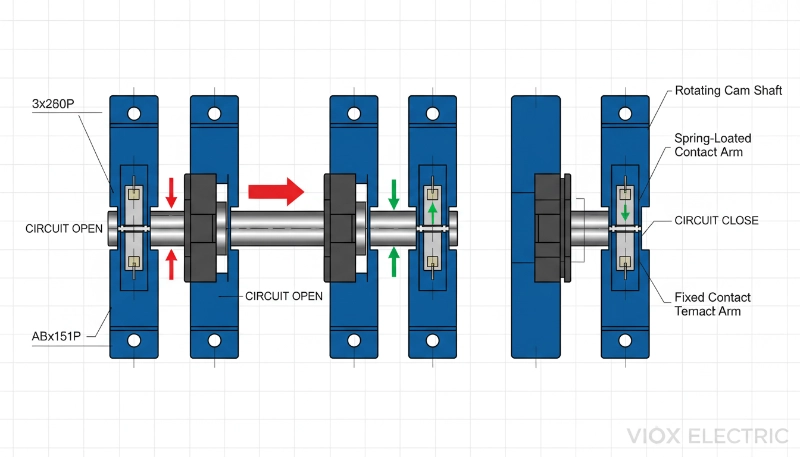
ຄຸນລັກສະນະທີ່ກໍານົດແມ່ນ cam ເອງ: ແຜ່ນ profiled ພິເສດ (ຫຼືຊຸດຂອງແຜ່ນ) ຕິດຢູ່ເທິງ shaft rotating. ໃນຂະນະທີ່ທ່ານຫັນມືຈັບຫຼືລູກບິດ, cam ຫມຸນແລະຂອບ contoured ຂອງມັນກົດດັນຕໍ່ກັບການຕິດຕໍ່ໄຟຟ້າ spring-loaded, ບັງຄັບໃຫ້ພວກເຂົາເປີດຫຼືປິດໂດຍອີງໃສ່ຮູບຮ່າງຂອງ cam. ແຕ່ລະຕໍາແຫນ່ງຂອງມືຈັບກົງກັບການປະສົມປະສານທີ່ເປັນເອກະລັກຂອງການຕິດຕໍ່ທີ່ປິດແລະເປີດ. ຕໍາແຫນ່ງ 1 ອາດຈະປິດການຕິດຕໍ່ A, B, ແລະ D ໃນຂະນະທີ່ປ່ອຍໃຫ້ C ແລະ E ເປີດ. ຫັນໄປຫາຕໍາແຫນ່ງ 2, ແລະໃນປັດຈຸບັນການຕິດຕໍ່ A, C, ແລະ E ຖືກປິດໃນຂະນະທີ່ B ແລະ D ເປີດ. ໂຄງການປ່ຽນແມ່ນ machined ຕົວຫນັງສືເຂົ້າໄປໃນ profile cam.
ນີ້ເຮັດໃຫ້ສະວິດ cam ເຫມາະສົມສໍາລັບ ຕົວຄວບຄຸມຫຼາຍວົງຈອນ: ຄໍາຮ້ອງສະຫມັກທີ່ທ່ານຕ້ອງການປະສານງານການປະຕິບັດການປ່ຽນຫຼາຍຈາກການປ້ອນຂໍ້ມູນຂອງຜູ້ປະຕິບັດການດຽວ. ຄິດເຖິງການປີ້ນກັບທິດທາງຂອງມໍເຕີ (ການແລກປ່ຽນໄລຍະ), ການຄວບຄຸມມໍເຕີຫຼາຍຄວາມໄວ (ການປ່ຽນດາວ-ເດນຕາ), ການປ່ຽນແຫຼ່ງພະລັງງານ (ສາຍໄຟໄປຫາເຄື່ອງກໍາເນີດ), ຫຼືການເລືອກການວັດແທກ (ເຄື່ອງວັດແທກແຮງດັນອ່ານໄລຍະ L1, L2, ຫຼື L3). ສະວິດ cam ດຽວແທນສິ່ງທີ່ຈະຕ້ອງມີສະວິດສ່ວນບຸກຄົນຫຼາຍ, ຕາມເຫດຜົນ relay ສະລັບສັບຊ້ອນ, ຫຼືຕົວຄວບຄຸມ programmable.
ຄຸນນະສົມບັດທີ່ສໍາຄັນທີ່ກໍານົດສະວິດ cam ອຸດສາຫະກໍາ:
- ການດໍາເນີນງານຄູ່ມື: ບໍ່ມີ coil, ບໍ່ມີລະບົບອັດຕະໂນມັດ, ບໍ່ມີການຄວບຄຸມຫ່າງໄກສອກຫຼີກ. ການກະຕຸ້ນກົນຈັກບໍລິສຸດ.
- ຄວາມສາມາດຫຼາຍຕໍາແຫນ່ງ: ປົກກະຕິແລ້ວ 2 ຫາ 12 ຕໍາແຫນ່ງ, ໂດຍມີ detents ໃຫ້ຄໍາຄຶດຄໍາເຫັນ tactile ໃນແຕ່ລະບ່ອນຢຸດ.
- ຄວາມຫນາແຫນ້ນຂອງການຕິດຕໍ່ສູງ: footprint ຂະຫນາດນ້ອຍສາມາດບັນຈຸ 3, 6, 9, ຫຼືຫຼາຍກວ່າເສົາປ່ຽນເອກະລາດ.
- ການກໍ່ສ້າງທີ່ເຂັ້ມແຂງ: ອອກແບບມາສໍາລັບສະພາບແວດລ້ອມອຸດສາຫະກໍາທີ່ມີຄວາມທົນທານກົນຈັກສູງ (ມັກຈະ 500,000 ຫາຫຼາຍກວ່າ 1 ລ້ານການດໍາເນີນງານ).
- ການອອກແບບ Modular: ບລັອກຕິດຕໍ່ສາມາດ stacked ແລະປັບແຕ່ງເພື່ອສ້າງລໍາດັບການປ່ຽນສະເພາະຄໍາຮ້ອງສະຫມັກ.
ການຄ້າ? ສະວິດ Cam ແມ່ນອຸປະກອນຄູ່ມືເທົ່ານັ້ນ. ຖ້າຄໍາຮ້ອງສະຫມັກຂອງທ່ານຕ້ອງການການປ່ຽນຫ່າງໄກສອກຫຼີກຫຼືອັດຕະໂນມັດ, ທ່ານຕ້ອງການ contactor ຫຼື relay. ແຕ່ເມື່ອຜູ້ປະຕິບັດການຕ້ອງການການຄວບຄຸມ tactile ໂດຍກົງກ່ຽວກັບລໍາດັບການປ່ຽນສະລັບສັບຊ້ອນ - ແລະຄວາມຫນ້າເຊື່ອຖືມີຄວາມສໍາຄັນຫຼາຍກວ່າລະບົບອັດຕະໂນມັດ - ສະວິດ cam ແມ່ນບໍ່ມີໃຜທຽບເທົ່າ.
ວິທີການເຮັດວຽກຂອງສະວິດ Cam: Ballet ກົນຈັກ
ດຶງສະວິດ cam ອອກຈາກກັນແລະທ່ານຈະພົບເຫັນລະບົບກົນຈັກທີ່ສະຫງ່າງາມທີ່ປ່ຽນການເຄື່ອນໄຫວຫມຸນເຂົ້າໄປໃນການປ່ຽນໄຟຟ້າທີ່ສັບສົນ. ບໍ່ມີ microprocessors, ບໍ່ມີ firmware, ບໍ່ມີການຂຽນໂປຣແກຣມ - ພຽງແຕ່ອົງປະກອບ machined ຄວາມແມ່ນຍໍາປະຕິບັດລໍາດັບ choreographed. ນີ້ແມ່ນວິທີທີ່ຕ່ອນມາຮ່ວມກັນ.

ອົງປະກອບຫຼັກ
Shaft Rotating ແລະ Handle
ນີ້ແມ່ນສິ່ງທີ່ຜູ້ປະຕິບັດການພົວພັນກັບ. ມືຈັບເຊື່ອມຕໍ່ກັບ shaft ສູນກາງທີ່ແລ່ນຜ່ານການປະກອບສະວິດທັງຫມົດ. ຫັນມືຈັບ, ແລະ shaft ຫມຸນ, ເອົາແຜ່ນ cam ກັບມັນ. ກົນໄກ detent - ປົກກະຕິແລ້ວລູກປືນ spring-loaded ຂີ່ຢູ່ໃນ notches machined ເຂົ້າໄປໃນແຜ່ນ detent - ໃຫ້ຄໍາຄຶດຄໍາເຫັນ tactile ໃນແຕ່ລະຕໍາແຫນ່ງແລະປ້ອງກັນບໍ່ໃຫ້ສະວິດ settling ລະຫວ່າງຕໍາແຫນ່ງພາຍໃຕ້ການສັ່ນສະເທືອນ.
ແຜ່ນ Cam (ຫຼືແຜ່ນ)
ນີ້ແມ່ນສະຫມອງຂອງການດໍາເນີນງານ. ແຕ່ລະແຜ່ນ cam ແມ່ນລໍ້ profiled ຢ່າງຊັດເຈນທີ່ຕິດຢູ່ເທິງ shaft rotating. perimeter ຂອງແຜ່ນບໍ່ແມ່ນວົງ - ມັນມີຈຸດສູງ (lobes) ແລະຈຸດຕ່ໍາ (ຮ່ອມພູ) machined ເຂົ້າໄປໃນມັນ. ໃນຂະນະທີ່ແຜ່ນຫມຸນ, contours ເຫຼົ່ານີ້ກົດດັນຕໍ່ກັບ actuators ຕິດຕໍ່, ກໍານົດວ່າການຕິດຕໍ່ໃດປິດແລະທີ່ຍັງເປີດ. ສໍາລັບສະວິດງ່າຍດາຍ, ແຜ່ນ cam ດຽວຄວບຄຸມການຕິດຕໍ່ທັງຫມົດ. ສໍາລັບລໍາດັບການປ່ຽນສະລັບສັບຊ້ອນ, ແຜ່ນ cam ຫຼາຍຖືກ stacked ຢູ່ເທິງ shaft, ແຕ່ລະຄົນຄວບຄຸມຊຸດຕິດຕໍ່ທີ່ແຕກຕ່າງກັນ.
ບລັອກຕິດຕໍ່ (ຈຸລັງປ່ຽນ)
ເຫຼົ່ານີ້ແມ່ນຫນ່ວຍງານ modular, ແຕ່ລະຄົນມີຫນຶ່ງຫຼືຫຼາຍຊຸດຂອງການຕິດຕໍ່ໄຟຟ້າ. ບລັອກຕິດຕໍ່ປົກກະຕິແລ້ວປະກອບມີການຕິດຕໍ່ເຄື່ອນຍ້າຍ (ສ່ວນທີ່ເປີດແລະປິດ) ແລະການຕິດຕໍ່ stationary (ຈຸດເຊື່ອມຕໍ່ຄົງທີ່). ຄວາມກົດດັນພາກຮຽນ spring ເຮັດໃຫ້ການຕິດຕໍ່ເຄື່ອນຍ້າຍຢູ່ໃນຕໍາແຫນ່ງພັກຜ່ອນຂອງມັນ - ເປີດຫຼືປິດ. ໃນເວລາທີ່ lobe cam ກົດດັນຕໍ່ກັບ actuator ຕິດຕໍ່, ມັນບັງຄັບໃຫ້ການຕິດຕໍ່ເຄື່ອນຍ້າຍເພື່ອປ່ຽນສະຖານະ.
ບລັອກຕິດຕໍ່ແມ່ນ stackable. ຕ້ອງການສາມເສົາປ່ຽນເອກະລາດບໍ? Stack ສາມບລັອກຕິດຕໍ່. ຕ້ອງການຫົກບໍ? Stack ຫົກ. modularity ນີ້ແມ່ນສິ່ງທີ່ອະນຸຍາດໃຫ້ສະວິດ cam ໄດ້ຮັບການປັບແຕ່ງສໍາລັບຄໍາຮ້ອງສະຫມັກສະເພາະໂດຍບໍ່ມີການອອກແບບສະວິດໃຫມ່ຈາກ scratch.
ກອບແລະທີ່ຢູ່ອາໄສ
ກອບຖືທຸກສິ່ງທຸກຢ່າງຮ່ວມກັນແລະໃຫ້ການຈັດຕໍາແຫນ່ງກົນຈັກ. ທີ່ຢູ່ອາໄສປົກປ້ອງອົງປະກອບພາຍໃນຈາກຂີ້ຝຸ່ນ, ຄວາມຊຸ່ມຊື່ນ, ແລະຄວາມເສຍຫາຍທາງກົນຈັກ. ສະວິດ Cam ອຸດສາຫະກໍາໂດຍທົ່ວໄປແມ່ນໄດ້ຮັບການຈັດອັນດັບ IP20 ຫາ IP65, ຂຶ້ນກັບວ່າພວກເຂົາຖືກຕິດຕັ້ງຢູ່ພາຍໃນແຜງທີ່ຜະນຶກເຂົ້າກັນຫຼືສໍາຜັດກັບສະພາບແວດລ້ອມ.
ລໍາດັບການປ່ຽນ: ຈາກການຫມຸນໄປສູ່ການຄວບຄຸມວົງຈອນ
ນີ້ແມ່ນສິ່ງທີ່ເກີດຂື້ນເມື່ອທ່ານຫັນມືຈັບຈາກຕໍາແຫນ່ງ 0 ໄປຫາຕໍາແຫນ່ງ 1:
- shaft ຫມຸນ: ມືຂອງທ່ານຫັນມືຈັບ, ຫມຸນ shaft ສູນກາງແລະແຜ່ນ cam ທີ່ຕິດຄັດທັງຫມົດ.
- Cam lobes ເຂົ້າຮ່ວມ actuators ຕິດຕໍ່: ໃນຂະນະທີ່ cam ຫມຸນ, ຈຸດສູງຂອງມັນ (lobes) ກົດດັນຕໍ່ກັບ actuators spring-loaded ໃນບລັອກຕິດຕໍ່. ບ່ອນທີ່ profile cam ສູງ, actuator ຖືກກົດດັນ, compressing ພາກຮຽນ spring ພາຍໃນຂອງມັນ. ບ່ອນທີ່ profile cam ຕ່ໍາ (ຮ່ອມພູ), actuator ຜ່ອນຄາຍ.
- ການຕິດຕໍ່ປ່ຽນສະຖານະ: ໃນເວລາທີ່ actuator ຖືກກົດດັນ, ມັນບັງຄັບໃຫ້ການຕິດຕໍ່ເຄື່ອນຍ້າຍເພື່ອປ່ຽນ - ເປີດການຕິດຕໍ່ປິດປົກກະຕິຫຼືປິດການຕິດຕໍ່ເປີດປົກກະຕິ. ການປະສົມປະສານທີ່ແນ່ນອນຂອງການຕິດຕໍ່ເປີດແລະປິດແມ່ນຂຶ້ນກັບ profile cam ໃນຕໍາແຫນ່ງຫມຸນນັ້ນ.
- detent locks ຕໍາແຫນ່ງ: ເມື່ອ shaft ຮອດ notch detent ຕໍ່ໄປ, ລູກປືນ spring-loaded ຫຼຸດລົງເຂົ້າໄປໃນສະຖານທີ່, locking ສະວິດໃນຕໍາແຫນ່ງ 1 ແລະໃຫ້ການຢືນຢັນ tactile ກັບຜູ້ປະຕິບັດການ.
- ຄວາມຕໍ່ເນື່ອງໄຟຟ້າແມ່ນສ້າງຕັ້ງຂຶ້ນ (ຫຼືແຕກຫັກ): ດ້ວຍການຕິດຕໍ່ໃນປັດຈຸບັນຢູ່ໃນສະຖານະໃຫມ່ຂອງພວກເຂົາ, ກະແສໄຟຟ້າ (ຫຼືຢຸດ) ຜ່ານວົງຈອນທີ່ເຊື່ອມຕໍ່. ມໍເຕີສາມໄລຍະອາດຈະເຊື່ອມຕໍ່ສໍາລັບການຫມຸນໄປຂ້າງຫນ້າ. ເຄື່ອງວັດແທກແຮງດັນອາດຈະອ່ານໄລຍະ L2 ແທນ L1.
ຫັນມືຈັບອີກເທື່ອຫນຶ່ງໄປຫາຕໍາແຫນ່ງ 2, ແລະ cams ຫມຸນຕື່ມອີກ, ຍູ້ actuators ທີ່ແຕກຕ່າງກັນແລະສ້າງການປະສົມປະສານໃຫມ່ຂອງການຕິດຕໍ່ເປີດແລະປິດ. ແຕ່ລະຕໍາແຫນ່ງມືຈັບກົງກັບສະຖານະໄຟຟ້າທີ່ເປັນເອກະລັກ, ແລະສະຖານະນັ້ນແມ່ນກໍານົດທັງຫມົດໂດຍ profile ກົນຈັກ machined ເຂົ້າໄປໃນແຜ່ນ cam.
专业提示: profile cam ແມ່ນຖາວອນ. ເມື່ອ machined, ລໍາດັບການປ່ຽນແມ່ນຄົງທີ່. ນີ້ແມ່ນທັງຄວາມເຂັ້ມແຂງ (ບໍ່ມີຂໍ້ຜິດພາດໃນການຂຽນໂປຣແກຣມ, ບໍ່ມີຂໍ້ບົກພ່ອງຂອງຊອບແວ, ບໍ່ມີການສໍ້ລາດບັງຫຼວງ) ແລະຂໍ້ຈໍາກັດ (ການປ່ຽນແປງລໍາດັບຮຽກຮ້ອງໃຫ້ມີການປ່ຽນແທນແຜ່ນ cam ທາງດ້ານຮ່າງກາຍ). ສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການຕາມເຫດຜົນທີ່ສາມາດກໍານົດໄດ້, PLC ຫຼື relay programmable ແມ່ນທາງເລືອກທີ່ດີກວ່າ. ສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການຄວາມຫນ້າເຊື່ອຖື bulletproof ແລະຄວາມຫມັ້ນໃຈຂອງຜູ້ປະຕິບັດການວ່າສະວິດຈະເຮັດຢ່າງແນ່ນອນສິ່ງທີ່ມັນຄວນຈະເຮັດ, ສະວິດ cam ແມ່ນຍາກທີ່ຈະຕີ.
ປະເພດຂອງສະວິດ Cam: ຊອກຫາການຕັ້ງຄ່າທີ່ຖືກຕ້ອງ
ສະວິດ Cam ມາໃນຫຼາຍປະເພດທີ່ເປັນປະໂຫຍດ, ແຕ່ລະຄົນໄດ້ຮັບການປັບປຸງສໍາລັບສະຖານະການຄວບຄຸມສະເພາະ. ປະເພດທີ່ທ່ານເລືອກແມ່ນຂຶ້ນກັບສິ່ງທີ່ທ່ານກໍາລັງຄວບຄຸມແລະຈໍານວນລັດປ່ຽນທີ່ທ່ານຕ້ອງການ.
ສະວິດ ON/OFF (ສະວິດ Isolator)
ການຕັ້ງຄ່າທີ່ງ່າຍທີ່ສຸດ. ເຫຼົ່ານີ້ແມ່ນສະວິດສອງຕໍາແຫນ່ງ: OFF (0) ແລະ ON (1). ການຕິດຕໍ່ທັງຫມົດເຮັດວຽກພ້ອມໆກັນ - ຫັນໄປຫາຕໍາແຫນ່ງ 1, ແລະທຸກໆເສົາປິດ; ຫັນໄປຫາຕໍາແຫນ່ງ 0, ແລະພວກເຂົາທັງຫມົດເປີດ. ຄິດເຖິງສິ່ງເຫຼົ່ານີ້ເປັນສະວິດ disconnect ຄູ່ມືຫຼື isolators ໂຫຼດ.
ການນໍາໃຊ້ທົ່ວໄປ: ການແຍກພະລັງງານຕົ້ນຕໍສໍາລັບການບໍາລຸງຮັກສາເຄື່ອງຈັກ, ການປິດຄູ່ມືສຸກເສີນ, ການຕັດການເຊື່ອມຕໍ່ສໍາຮອງສໍາລັບລະບົບອັດຕະໂນມັດ.
ເປັນຫຍັງເລືອກປະເພດນີ້: ເມື່ອທ່ານຕ້ອງການວິທີການທີ່ງ່າຍດາຍ, ດໍາເນີນການດ້ວຍມືເພື່ອຕັດໄຟຟ້າໄປຫາວົງຈອນຫຼືເຄື່ອງຈັກ. ການປະຕິບັດກົນຈັກໃຫ້ການຢືນຢັນທີ່ເຫັນໄດ້ວ່າວົງຈອນເປີດ. ບໍ່ເຫມືອນກັບ circuit breaker, ບໍ່ມີຫນ້າທີ່ການເດີນທາງອັດຕະໂນມັດ - ນີ້ແມ່ນການຄວບຄຸມຄູ່ມືບໍລິສຸດ.
ສະວິດປ່ຽນ (ສະວິດໂອນ)
ສະວິດເຫຼົ່ານີ້ໂອນການໂຫຼດຈາກແຫຼ່ງພະລັງງານຫນຶ່ງໄປຫາອີກແຫຼ່ງຫນຶ່ງ. ການຕັ້ງຄ່າປົກກະຕິແມ່ນສາມຕໍາແຫນ່ງ: ແຫຼ່ງ A - OFF - ແຫຼ່ງ B. ຕໍາແຫນ່ງສູນກາງ (0) ຕັດການເຊື່ອມຕໍ່ທັງສອງແຫຼ່ງ, ປ້ອງກັນການ backfeed. ຕໍາແຫນ່ງ 1 ເຊື່ອມຕໍ່ການໂຫຼດກັບແຫຼ່ງ A (ເຊັ່ນ: ພະລັງງານສາຍ). ຕໍາແຫນ່ງ 2 ເຊື່ອມຕໍ່ການໂຫຼດກັບແຫຼ່ງ B (ເຊັ່ນ: ເຄື່ອງກໍາເນີດຫຼືການສະຫນອງສໍາຮອງ).
ການນໍາໃຊ້ທົ່ວໄປ: ການໂອນເຄື່ອງກໍາເນີດໄຟຟ້າຄູ່ມື, ການເລືອກແຫຼ່ງພະລັງງານຄູ່, ການປ່ຽນພະລັງງານສໍາຮອງ, ລະບົບການສະຫນອງທີ່ຊ້ໍາກັນ.
ເປັນຫຍັງເລືອກປະເພດນີ້: ເມື່ອທ່ານຕ້ອງການເລືອກດ້ວຍຕົນເອງລະຫວ່າງສອງແຫຼ່ງພະລັງງານທີ່ແຕກຕ່າງກັນແລະຮັບປະກັນວ່າທັງສອງແຫຼ່ງບໍ່ເຄີຍເຊື່ອມຕໍ່ພ້ອມໆກັນ (ເຊິ່ງຈະເຮັດໃຫ້ເກີດວົງຈອນສັ້ນຫຼືຄວາມຜິດພາດຂະຫນານ). interlock ກົນຈັກທີ່ສ້າງຂຶ້ນໃນ profile cam ເຮັດໃຫ້ການເຊື່ອມຕໍ່ພ້ອມໆກັນເປັນໄປບໍ່ໄດ້.
ສະວິດເລືອກ (ສະວິດຫຼາຍຕໍາແຫນ່ງ)
ເຫຼົ່ານີ້ແມ່ນມີດກອງທັບສະວິດຂອງສະວິດ cam. ພວກເຂົາສະເຫນີສາມຕໍາແຫນ່ງຫຼືຫຼາຍກວ່ານັ້ນ, ແຕ່ລະຄົນກະຕຸ້ນການປະສົມປະສານທີ່ແຕກຕ່າງກັນຂອງການຕິດຕໍ່. ການຕັ້ງຄ່າທົ່ວໄປປະກອບມີສະວິດ 3 ຕໍາແຫນ່ງ, 4 ຕໍາແຫນ່ງ, ແລະສູງເຖິງ 12 ຕໍາແຫນ່ງ.
ການນໍາໃຊ້ປົກກະຕິ:
- ການເລືອກໂຫມດ: AUTO - OFF - MANUAL - TEST
- ການເລືອກຄວາມໄວ: ຊ້າ — ກາງ — ໄວ
- ການເລືອກຟັງຊັນ: ຮ້ອນ — ປິດ — ເຢັນ — ພັດລົມ
- ການເລືອກການວັດແທກ: ການອ່ານໂວນແມັດ L1 — L2 — L3 (ສາມເຟດ)
ເປັນຫຍັງເລືອກປະເພດນີ້: ເມື່ອທ່ານຕ້ອງການໃຫ້ຜູ້ປະຕິບັດງານມີຮູບແບບການເຮັດວຽກທີ່ແຕກຕ່າງກັນຫຼາຍຮູບແບບຈາກຈຸດຄວບຄຸມດຽວ. ແຕ່ລະຕໍາແໜ່ງສາມາດເປີດໃຊ້ວົງຈອນທີ່ແຕກຕ່າງກັນໄດ້ຢ່າງສົມບູນ. ຕົວຢຸດຮັບປະກັນວ່າຜູ້ປະຕິບັດງານບໍ່ສາມາດລົງຈອດລະຫວ່າງຕໍາແໜ່ງໂດຍບັງເອີນ.
ສະວິດຄວບຄຸມມໍເຕີ
ເຫຼົ່ານີ້ແມ່ນສະວິດແຄມພິເສດທີ່ຖືກຕັ້ງຄ່າສະເພາະສໍາລັບຫນ້າທີ່ຄວບຄຸມມໍເຕີ: ໄປໜ້າ, ຖອຍຫຼັງ, ຢຸດ, ແລ່ນຊ້າ. ສະວິດແຄມຄວບຄຸມມໍເຕີປົກກະຕິອາດຈະເປັນຕົວເລືອກ 3 ຕໍາແໜ່ງ (ໄປໜ້າ — ປິດ — ຖອຍຫຼັງ) ບ່ອນທີ່ແຕ່ລະທິດທາງປ່ຽນສອງໃນສາມເຟດຂອງມໍເຕີເພື່ອປີ້ນການຫມູນວຽນ.
ການນໍາໃຊ້ທົ່ວໄປ: ການຄວບຄຸມທິດທາງສາຍພານລໍາລຽງ, ການຄວບຄຸມການຍົກຂຶ້ນ/ລົງ, ການເຮັດວຽກຂອງພັດລົມປີ້ນກັບກັນໄດ້, ທິດທາງແກນເຄື່ອງມືເຄື່ອງຈັກ.
ເປັນຫຍັງເລືອກປະເພດນີ້: ເມື່ອທ່ານຕ້ອງການການຄວບຄຸມທິດທາງມໍເຕີດ້ວຍມື, ຢູ່ໃນທ້ອງຖິ່ນ ໂດຍບໍ່ຕ້ອງເພິ່ງພາອາໄສຄອນແທັກເຕີ ຫຼື PLC. ສະວິດເຫຼົ່ານີ້ຖືກສ້າງຂຶ້ນດ້ວຍລະດັບກະແສໄຟຟ້າທີ່ສູງກວ່າເພື່ອຈັດການກັບກະແສໄຟຟ້າເລີ່ມຕົ້ນຂອງມໍເຕີ ແລະມັກຈະຖືກຈັບຄູ່ກັບຣີເລໂຫຼດເກີນຄວາມຮ້ອນເພື່ອປ້ອງກັນ. ຂໍ້ໄດ້ປຽບເມື່ອທຽບກັບລະບົບທີ່ໃຊ້ຄອນແທັກເຕີແມ່ນການຄວບຄຸມໂດຍກົງຂອງຜູ້ປະຕິບັດງານ—ບໍ່ຕ້ອງລໍຖ້າໃຫ້ຣີເລມີພະລັງງານ, ແລະບໍ່ມີຄວາມສ່ຽງຕໍ່ຄວາມລົ້ມເຫຼວຂອງວົງຈອນຄວບຄຸມທີ່ເຮັດໃຫ້ມໍເຕີຢູ່ໃນສະພາບທີ່ບໍ່ຖືກຕ້ອງ.
专业提示: ສໍາລັບການນໍາໃຊ້ປີ້ນກັບມໍເຕີ, ເລືອກສະວິດແຄມທີ່ມີຕໍາແໜ່ງ OFF ຢູ່ກາງ. ນີ້ຮັບປະກັນວ່າມໍເຕີຢຸດຢ່າງສົມບູນກ່ອນທີ່ຈະປີ້ນກັບ, ປ້ອງກັນ ໄພພິບັດການປ່ຽນແປງທິດທາງ—ຄວາມກົດດັນທາງກົນຈັກແລະໄຟຟ້າຂອງການປີ້ນມໍເຕີໃນຂະນະທີ່ມັນຍັງຫມຸນຢູ່. ສະວິດແຄມຄວບຄຸມມໍເຕີບາງອັນປະກອບມີການເຊື່ອມຕໍ່ກົນຈັກໃນຕົວທີ່ຕ້ອງການໃຫ້ມືຈັບຜ່ານຕໍາແໜ່ງ OFF ກ່ອນທີ່ຈະໄປຮອດທິດທາງກົງກັນຂ້າມ.
ສະວິດເລືອກໂວນແມັດ ແລະ ແອມແມັດ
ເຫຼົ່ານີ້ແມ່ນສ່ວນຍ່ອຍຂອງຕົວເລືອກຫຼາຍຕໍາແໜ່ງທີ່ຖືກອອກແບບມາສະເພາະສໍາລັບແຜງເຄື່ອງມື. ພວກເຂົາອະນຸຍາດໃຫ້ເຄື່ອງວັດແທກດຽວ (ໂວນແມັດ ຫຼື ແອມແມັດ) ເພື່ອວັດແທກຫຼາຍຈຸດໃນລະບົບ. ຕົວຢ່າງ, ສະວິດເລືອກໂວນແມັດສາມເຟດມີສີ່ຕໍາແໜ່ງ: L1-N, L2-N, L3-N, ແລະ OFF.
ການນໍາໃຊ້ທົ່ວໄປ: ແຜງຄວບຄຸມມໍເຕີສາມເຟດ, ການຕິດຕາມກວດກາແຜງຈໍາໜ່າຍ, ແຜງຄວບຄຸມເຄື່ອງກໍາເນີດໄຟຟ້າ, ສະຖານີຕິດຕາມກວດກາເຄື່ອງຈັກອຸດສາຫະກໍາ.
ເປັນຫຍັງເລືອກປະເພດນີ້: ການປະຫຍັດຄ່າໃຊ້ຈ່າຍ ແລະ ພື້ນທີ່ແຜງ. ແທນທີ່ຈະຕິດຕັ້ງໂວນແມັດແຍກຕ່າງຫາກສາມອັນເພື່ອຕິດຕາມກວດກາລະບົບສາມເຟດ, ທ່ານຕິດຕັ້ງເຄື່ອງວັດແທກອັນໜຶ່ງ ແລະ ສະວິດເລືອກອັນໜຶ່ງ. ຜູ້ປະຕິບັດງານຫມຸນສະວິດໄປຫາເຟດທີ່ຕ້ອງການ, ແລະເຄື່ອງວັດແທກສະແດງແຮງດັນ ຫຼື ກະແສໄຟຟ້າຂອງເຟດນັ້ນ.
ຂໍ້ພິຈາລະນາດ້ານວິສະວະກໍາທີ່ສໍາຄັນຢູ່ນີ້ແມ່ນລະດັບການຕິດຕໍ່. ສະວິດເລືອກໂວນແມັດມີກະແສໄຟຟ້າຕໍ່າຫຼາຍ (ມິນລິແອມ), ດັ່ງນັ້ນອາຍຸການຕິດຕໍ່ແມ່ນເກືອບບໍ່ມີຂອບເຂດ. ຢ່າງໃດກໍຕາມ, ສະວິດເລືອກແອມແມັດມີກະແສໄຟຟ້າໂຫຼດເຕັມທີ່ຖືກວັດແທກ, ດັ່ງນັ້ນທ່ານຈໍາເປັນຕ້ອງກໍານົດສະວິດສໍາລັບການໂຫຼດຕົວຈິງ—ບໍ່ພຽງແຕ່ພາລະຂອງເຄື່ອງວັດແທກເທົ່ານັ້ນ.

ການຈັດລຽງການຕິດຕໍ່ ແລະ ການຕັ້ງຄ່າຂົ້ວ
ການເຂົ້າໃຈຂົ້ວ, ຈໍານວນຕໍາແໜ່ງ, ແລະ ການຈັດລຽງການຕິດຕໍ່ແມ່ນສິ່ງຈໍາເປັນສໍາລັບການກໍານົດສະວິດແຄມທີ່ຖືກຕ້ອງ. ຄໍາສັບເຫຼົ່ານີ້ກໍານົດຈໍານວນວົງຈອນເອກະລາດທີ່ສະວິດຄວບຄຸມ ແລະ ວິທີການຕັ້ງຄ່າວົງຈອນເຫຼົ່ານັ້ນ.
ຂົ້ວ ແລະ ຈໍານວນຕໍາແໜ່ງ: ພື້ນຖານ
ຂົ້ວ: ຂົ້ວແມ່ນວົງຈອນສະຫຼັບເອກະລາດ. ສະວິດຂົ້ວດຽວຄວບຄຸມຫນຶ່ງວົງຈອນ. ສະວິດສາມຂົ້ວຄວບຄຸມສາມວົງຈອນເອກະລາດ. ໃນການນໍາໃຊ້ມໍເຕີສາມເຟດ, ທ່ານປົກກະຕິແລ້ວຈະໃຊ້ສະວິດສາມຂົ້ວ ຫຼື ສີ່ຂົ້ວ (ຫນຶ່ງຂົ້ວຕໍ່ເຟດ, ບວກກັບທາງເລືອກຫນຶ່ງສໍາລັບກາງ).
ຈໍານວນຕໍາແໜ່ງ: ຈໍານວນຕໍາແໜ່ງແມ່ນຈໍານວນຕໍາແໜ່ງຜົນຜະລິດທີ່ແຕ່ລະຂົ້ວສາມາດເຊື່ອມຕໍ່ໄດ້. ສະວິດຕໍາແໜ່ງດຽວເຊື່ອມຕໍ່ຂົ້ວກັບຫນຶ່ງຜົນຜະລິດ (ON/OFF). ສະວິດຕໍາແໜ່ງຄູ່ເຊື່ອມຕໍ່ຂົ້ວກັບຫນຶ່ງໃນສອງຜົນຜະລິດທີ່ເປັນໄປໄດ້ (ເຊັ່ນ: ການປ່ຽນ: ຜົນຜະລິດ A ຫຼື ຜົນຜະລິດ B).
ການຕັ້ງຄ່າທົ່ວໄປ:
- SPST (ຂົ້ວດຽວ, ຕໍາແໜ່ງດຽວ): ສະວິດ ON/OFF ພື້ນຖານທີ່ຄວບຄຸມຫນຶ່ງວົງຈອນ.
- SPDT (ຂົ້ວດຽວ, ສອງຕໍາແໜ່ງ): ສະວິດປ່ຽນທີ່ນໍາພາຫນຶ່ງການປ້ອນຂໍ້ມູນໄປຫາຫນຶ່ງໃນສອງຜົນຜະລິດ.
- DPST (ສອງຂົ້ວ, ຕໍາແໜ່ງດຽວ): ສອງສະວິດ ON/OFF ເອກະລາດທີ່ດໍາເນີນການໂດຍມືຈັບດຽວ. ທົ່ວໄປສໍາລັບການສະຫຼັບທັງສາຍ ແລະ ກາງ, ຫຼື ຄວບຄຸມສອງການໂຫຼດແຍກຕ່າງຫາກພ້ອມໆກັນ.
- DPDT (ສອງຂົ້ວ, ສອງຕໍາແໜ່ງ): ສອງສະວິດປ່ຽນເອກະລາດ. ມັກໃຊ້ສໍາລັບການປີ້ນມໍເຕີ (ປ່ຽນສອງເຟດ) ຫຼື ການປ່ຽນວົງຈອນຄູ່.
- 3PDT, 4PDT, ແລະອື່ນໆ: ການຕັ້ງຄ່າສາມຂົ້ວ ຫຼື ສີ່ຂົ້ວສອງຕໍາແໜ່ງສໍາລັບການຄວບຄຸມມໍເຕີສາມເຟດ ຫຼື ການນໍາໃຊ້ການປ່ຽນທີ່ສັບສົນ.
ສະວິດແຄມສາມາດໄປໄດ້ໄກກວ່າ—ສູງເຖິງ 12 ຂົ້ວ ຫຼື ຫຼາຍກວ່ານັ້ນ, ດ້ວຍການຕັ້ງຄ່າຫຼາຍຕໍາແໜ່ງ (ຫຼາຍຕໍາແໜ່ງ). ສະວິດແຄມ 6 ຂົ້ວ, 4 ຕໍາແໜ່ງ (6P4T) ສາມາດຄວບຄຸມຫົກວົງຈອນເອກະລາດ, ແຕ່ລະວົງຈອນມີສີ່ສະຖານະທີ່ເປັນໄປໄດ້. ນັ້ນແມ່ນພະລັງງານຂອງການອອກແບບບລັອກການຕິດຕໍ່ແບບໂມດູນ.
ປະເພດການຕິດຕໍ່: NO, NC, ແລະ CO
ແຕ່ລະຂົ້ວໃນສະວິດແຄມສາມາດຖືກຕັ້ງຄ່າດ້ວຍປະເພດການຕິດຕໍ່ທີ່ແຕກຕ່າງກັນ:
ເປີດປົກກະຕິ (NO): ການຕິດຕໍ່ແມ່ນເປີດ (ບໍ່ມີການຕໍ່ເນື່ອງ) ເມື່ອສະວິດຢູ່ໃນຕໍາແໜ່ງພັກຜ່ອນຂອງມັນ. ແຄມຕ້ອງຍູ້ຕົວປະຕິບັດເພື່ອປິດການຕິດຕໍ່. ນີ້ແມ່ນການຕິດຕໍ່ “ເຮັດ”—ການຫັນມືຈັບ ເຮັດໃຫ້ ວົງຈອນ.
ປິດປົກກະຕິ (NC): ການຕິດຕໍ່ແມ່ນປິດ (ການຕໍ່ເນື່ອງ) ໃນຕໍາແໜ່ງພັກຜ່ອນ. ແຄມຕ້ອງຍູ້ຕົວປະຕິບັດເພື່ອເປີດການຕິດຕໍ່. ນີ້ແມ່ນການຕິດຕໍ່ “ຕັດ”—ການຫັນມືຈັບ ຕັດ ວົງຈອນ.
ການປ່ຽນ (CO): ເອີ້ນອີກວ່າການຕິດຕໍ່ “ໂອນ” ຫຼື ການຕິດຕໍ່ “SPDT”. ນີ້ແມ່ນການຕັ້ງຄ່າສາມຂົ້ວທີ່ມີຫນຶ່ງຂົ້ວທົ່ວໄປ ແລະ ສອງຂົ້ວຜົນຜະລິດ. ໃນຫນຶ່ງຕໍາແໜ່ງ, ທົ່ວໄປເຊື່ອມຕໍ່ກັບຜົນຜະລິດ A. ໃນອີກຕໍາແໜ່ງຫນຶ່ງ, ທົ່ວໄປເຊື່ອມຕໍ່ກັບຜົນຜະລິດ B. ການຕິດຕໍ່ໂອນການເຊື່ອມຕໍ່ຈາກຫນຶ່ງຜົນຜະລິດໄປຫາອີກຜົນຜະລິດຫນຶ່ງ.
ເມື່ອກໍານົດສະວິດແຄມ, ທ່ານກໍານົດການຈັດລຽງການຕິດຕໍ່ສໍາລັບແຕ່ລະຕໍາແໜ່ງ. ຕົວຢ່າງ, ສະວິດຄວບຄຸມມໍເຕີ 3 ຕໍາແໜ່ງອາດຈະມີການຈັດລຽງນີ້:
- ຕໍາແໜ່ງ 1 (ໄປໜ້າ): ຂົ້ວ 1, 2, 3 ຖືກຕັ້ງຄ່າເປັນ L1-U, L2-V, L3-W
- ຕໍາແໜ່ງ 0 (ປິດ): ທຸກຂົ້ວເປີດ
- ຕໍາແໜ່ງ 2 (ຖອຍຫຼັງ): ຂົ້ວ 1, 2, 3 ຖືກຕັ້ງຄ່າເປັນ L1-W, L2-V, L3-U (ປ່ຽນເຟດ U ແລະ W)
ໂປຣໄຟລ໌ແຄມສໍາລັບແຕ່ລະຂົ້ວຖືກອອກແບບມາເພື່ອບັນລຸລໍາດັບນີ້ຢ່າງແນ່ນອນ.
专业提示: ເມື່ອອອກແບບການຈັດລຽງການຕິດຕໍ່ແບບກໍານົດເອງ, ຈົ່ງແຕ້ມຕາຕະລາງການສະຫຼັບກ່ອນ—ຕາຂ່າຍທີ່ສະແດງໃຫ້ເຫັນວ່າການຕິດຕໍ່ໃດຖືກປິດໃນແຕ່ລະຕໍາແໜ່ງ. ຜູ້ຜະລິດສ່ວນໃຫຍ່ສະຫນອງເຄື່ອງມືຊອບແວ ຫຼື ຄູ່ມືການເລືອກເພື່ອຊ່ວຍທ່ານອອກແບບໂປຣໄຟລ໌ແຄມໂດຍອີງໃສ່ຕາຕະລາງການສະຫຼັບຂອງທ່ານ. ແລະກວດສອບການຈັດລຽງສະເໝີດ້ວຍເຄື່ອງກວດສອບການຕໍ່ເນື່ອງກ່ອນການເລີ່ມຕົ້ນ—ມັນງ່າຍກວ່າທີ່ຈະຈັບຂໍ້ຜິດພາດໃນການສາຍໄຟ ຫຼື ການຕັ້ງຄ່າແຄມທີ່ບໍ່ຖືກຕ້ອງຢູ່ເທິງໂຕະກວ່າໃນລະຫວ່າງການເລີ່ມຕົ້ນກາງຄືນ.

ລະດັບໄຟຟ້າ: ການຈັບຄູ່ສະວິດກັບການໂຫຼດ
ສະວິດແຄມສາມາດຄວບຄຸມຫຼາຍວົງຈອນ, ແຕ່ພຽງແຕ່ຖ້າມັນຖືກຈັດອັນດັບສໍາລັບການໂຫຼດໄຟຟ້າທີ່ທ່ານກໍາລັງຮ້ອງຂໍໃຫ້ມັນຈັດການ. ແຮງດັນ, ກະແສໄຟຟ້າ, ແລະ ປະເພດການໂຫຼດລ້ວນແຕ່ມີຄວາມສໍາຄັນ—ແລະ ລະດັບຈະປ່ຽນໄປຂຶ້ນກັບສິ່ງທີ່ທ່ານກໍາລັງສະຫຼັບ.
ລະດັບແຮງດັນແລະປະຈຸບັນ
ແຮງດັນປະຕິບັດການທີ່ຖືກຈັດອັນດັບ (Ue): ນີ້ແມ່ນແຮງດັນສູງສຸດທີ່ສະວິດຖືກອອກແບບມາເພື່ອຈັດການໃນການເຮັດວຽກປົກກະຕິ. ສະວິດແຄມອຸດສາຫະກໍາທົ່ວໄປຖືກຈັດອັນດັບສູງເຖິງ 690V AC ຫຼື 1000V AC (ຕໍ່ IEC 60947-3). ສໍາລັບການນໍາໃຊ້ DC, ລະດັບແມ່ນປົກກະຕິແລ້ວ 250V DC, 500V DC, ຫຼື 1500V DC, ຂຶ້ນກັບການອອກແບບ.
ກະແສປະຕິບັດການທີ່ຖືກຈັດອັນດັບ (Ie): ນີ້ແມ່ນກະແສສູງສຸດທີ່ສະວິດສາມາດບັນທຸກໄດ້ຢ່າງຕໍ່ເນື່ອງໂດຍບໍ່ມີຄວາມຮ້ອນເກີນໄປ. ລະດັບຕັ້ງແຕ່ 10A ສໍາລັບສະວິດເບົາບາງເຖິງ 160A ຫຼືຫຼາຍກວ່ານັ້ນສໍາລັບຮູບແບບອຸດສາຫະກໍາຫນັກ. ແຕ່ນີ້ແມ່ນຈຸດສໍາຄັນ: ລະດັບກະແສໄຟຟ້າແມ່ນຂຶ້ນກັບປະເພດການນໍາໃຊ້ (ເພີ່ມເຕີມກ່ຽວກັບເລື່ອງນັ້ນຂ້າງລຸ່ມນີ້).
ລະດັບແຮງດັນຂອງ insulation (Ui): ແຮງດັນທີ່ສະວິດສາມາດທົນທານໄດ້ລະຫວ່າງວົງຈອນທີ່ແຍກອອກຈາກກັນ ຫຼື ລະຫວ່າງພາກສ່ວນທີ່ມີໄຟຟ້າ ແລະ ດິນ. ນີ້ກໍານົດໄລຍະຫ່າງໄຟຟ້າ ແລະ ໄລຍະຫ່າງການເລືອ. ສະວິດທີ່ມີ Ui = 690V ໃຫ້ insulation ພຽງພໍສໍາລັບລະບົບສູງເຖິງແຮງດັນນັ້ນ.
ແຮງດັນໄຟຟ້າທົນທານຕໍ່ແຮງກະຕຸ້ນທີ່ຖືກຈັດອັນດັບ (Uimp): ແຮງດັນໄຟຟ້າຊົ່ວຄາວສູງສຸດທີ່ສະວິດສາມາດຢູ່ລອດໄດ້ໂດຍບໍ່ມີການແຕກແຍກຂອງ insulation. ນີ້ມີຄວາມສໍາຄັນໃນສະພາບແວດລ້ອມທີ່ມີການສໍາຜັດກັບຟ້າຜ່າຫຼືການປ່ຽນມໍເຕີເລື້ອຍໆ (ເຊິ່ງສ້າງແຮງດັນໄຟຟ້າ). ຄ່າປົກກະຕິ: 6 kV, 8 kV, ຫຼື 12 kV.
ປະເພດການນໍາໃຊ້: ປະເພດການໂຫຼດມີຄວາມສໍາຄັນ
ບໍ່ແມ່ນການໂຫຼດ 25A ທັງໝົດແມ່ນເທົ່າທຽມກັນ. ເຄື່ອງເຮັດຄວາມຮ້ອນ resistive 25A ແມ່ນງ່າຍທີ່ຈະປ່ຽນ; ມໍເຕີ 25A ເລີ່ມຕົ້ນສ້າງກະແສໄຟຟ້າເຂົ້າຢ່າງຫຼວງຫຼາຍ ແລະ back-EMF ທີ່ເນັ້ນໃສ່ການຕິດຕໍ່ຫຼາຍກວ່າກະແສໄຟຟ້າສະຖຽນລະພາບຊີ້ໃຫ້ເຫັນ. ນັ້ນແມ່ນເຫດຜົນທີ່ IEC 60947-3 ກໍານົດ ປະເພດການນໍາໃຊ້—ການຈັດປະເພດການໂຫຼດທີ່ໄດ້ມາດຕະຖານທີ່ລະບຸວ່າໜ້າທີ່ການປ່ຽນປະເພດໃດທີ່ການຕິດຕໍ່ຕ້ອງທົນທານ.
ປະເພດການນໍາໃຊ້ທົ່ວໄປສໍາລັບສະວິດ cam AC:
| ປະເພດ | ປະເພດການໂຫຼດ | Typical Application |
|---|---|---|
| AC-1 | ການໂຫຼດທີ່ບໍ່ແມ່ນ inductive ຫຼື inductive ເລັກນ້ອຍ | ເຄື່ອງເຮັດຄວາມຮ້ອນຄວາມຕ້ານທານ, ວົງຈອນການແຜ່ກະຈາຍ |
| AC-3 | ມໍເຕີ Squirrel-cage: ເລີ່ມຕົ້ນແລະປິດມໍເຕີແລ່ນ | ການຄວບຄຸມມໍເຕີມາດຕະຖານ, ປັ໊ມ, ພັດລົມ, ສາຍພານລໍາລຽງ |
| AC-15 | ການຄວບຄຸມການໂຫຼດໄຟຟ້າ (>72VA) | ຕິດຕໍ່ສື່ສານ, ວາວ solenoid |
| AC-20A / AC-20B | ການເຊື່ອມຕໍ່ແລະຕັດການເຊື່ອມຕໍ່ພາຍໃຕ້ເງື່ອນໄຂທີ່ບໍ່ມີການໂຫຼດ | ສະວິດ disconnect ຄູ່ມື, ການໂອນບໍ່ມີການໂຫຼດ |
| AC-21A / AC-21B | ການປ່ຽນການໂຫຼດ resistive, ລວມທັງການໂຫຼດເກີນປານກາງ | ວົງຈອນຄວາມຮ້ອນ, ແສງສະຫວ່າງ incandescent (ຫາຍາກໃນອຸດສາຫະກໍາ) |
| AC-22A / AC-22B | ການປ່ຽນການໂຫຼດ resistive ແລະ inductive ປະສົມ, ລວມທັງການໂຫຼດເກີນປານກາງ | ແສງສະຫວ່າງປະສົມແລະມໍເຕີຂະຫນາດນ້ອຍ |
| AC-23A / AC-23B | ການປ່ຽນການໂຫຼດມໍເຕີຫຼືການໂຫຼດ inductive ສູງອື່ນໆ | ການຄວບຄຸມມໍເຕີຫນັກ, ຄໍາຮ້ອງສະຫມັກແຮງບິດເລີ່ມຕົ້ນສູງ |
ຄໍາຕໍ່ທ້າຍຕົວອັກສອນຊີ້ໃຫ້ເຫັນຄວາມຖີ່ຂອງການດໍາເນີນງານ: ກ = ການດໍາເນີນງານເລື້ອຍໆ, ຂ = ການດໍາເນີນງານທີ່ບໍ່ຄ່ອຍເກີດຂຶ້ນ.
ສໍາລັບຄໍາຮ້ອງສະຫມັກ DC, ປະເພດປະກອບມີ DC-1 (resistive), DC-3 (ມໍເຕີ), DC-13 (electromagnets), ແລະອື່ນໆ. ກວດເບິ່ງ datasheet ສະເໝີ—ການປ່ຽນ DC ແມ່ນຍາກກວ່າການຕິດຕໍ່ກ່ວາ AC ເພາະວ່າບໍ່ມີການຂ້າມສູນເພື່ອດັບໄຟຟ້າຕາມທໍາມະຊາດ.
Derating ແລະເງື່ອນໄຂໂລກທີ່ແທ້ຈິງ
ການຈັດອັນດັບ Datasheet ສົມມຸດວ່າເງື່ອນໄຂຫ້ອງທົດລອງທີ່ຄວບຄຸມ: ອຸນຫະພູມອາກາດລ້ອມຮອບ 40°C, ລະດັບຄວາມສູງຂອງລະດັບນໍ້າທະເລ, ການຕິດຕໍ່ທີ່ສະອາດ, ແລະແຮງດັນທີ່ຖືກຈັດອັນດັບ. ການຕິດຕັ້ງໃນໂລກທີ່ແທ້ຈິງບໍ່ຄ່ອຍຈະຕອບສະຫນອງເງື່ອນໄຂເຫຼົ່ານີ້ທັງຫມົດ.
ການຫຼຸດອັດຕາອຸນຫະພູມ: ສໍາລັບທຸກໆ 10°C ຂ້າງເທິງ 40°C, ຄາດວ່າຈະຫຼຸດຄວາມສາມາດໃນປະຈຸບັນປະມານ 10-15%. ສະວິດ cam ທີ່ຖືກຈັດອັນດັບ 32A ທີ່ 40°C ອາດຈະບັນທຸກ 24A ຢ່າງປອດໄພໃນ enclosure panel 60°C ເທົ່ານັ້ນ.
ການຫຼຸດອັດຕາລະດັບຄວາມສູງ: ຂ້າງເທິງ 2,000 ແມັດ, ອາກາດບາງໆຫຼຸດຜ່ອນປະສິດທິພາບຄວາມເຢັນແລະຄວາມເຂັ້ມແຂງຂອງ dielectric. ຜູ້ຜະລິດໂດຍທົ່ວໄປລະບຸເສັ້ນໂຄ້ງ derating—ຄາດວ່າຈະຫຼຸດຜ່ອນປະຈຸບັນ 10-20% ທີ່ 3,000-4,000 ແມັດ.
ການສວມໃສ່ຂອງຈຸດເຊື່ອມຕໍ່: ເມື່ອການຕິດຕໍ່ມີອາຍຸແລະພັດທະນາການຜຸພັງຂອງຫນ້າດິນ, ຄວາມຕ້ານທານເພີ່ມຂຶ້ນ. ນີ້ສ້າງຄວາມຮ້ອນ, ເຊິ່ງເລັ່ງການເສື່ອມສະພາບຕື່ມອີກ. ການກວດກາເປັນປົກກະຕິແລະການທໍາຄວາມສະອາດການຕິດຕໍ່ເປັນບາງຄັ້ງຄາວຂະຫຍາຍຊີວິດ, ແຕ່ຄາດວ່າການປະຕິບັດຈະຄ່ອຍໆຫຼຸດລົງໃນໄລຍະຫຼາຍຮ້ອຍພັນຮອບວຽນ.
专业提示: ສໍາລັບຄໍາຮ້ອງສະຫມັກຄວບຄຸມມໍເຕີ (ປະເພດ AC-3), ເລືອກສະວິດ cam ທີ່ຖືກຈັດອັນດັບຢ່າງຫນ້ອຍ 1.5× ກະແສໄຟຟ້າເຕັມທີ່ຂອງມໍເຕີ. ການເລີ່ມຕົ້ນຂອງມໍເຕີ (ປົກກະຕິ 5-7× FLA) ແມ່ນໂຫດຮ້າຍໃນການຕິດຕໍ່. ຖ້າມໍເຕີແມ່ນ 10A FLA, ໃຫ້ລະບຸສະວິດທີ່ຖືກຈັດອັນດັບຢ່າງຫນ້ອຍ 16A ໃນຫນ້າທີ່ AC-3. ສໍາລັບການຄວບຄຸມມໍເຕີ DC ຫຼືການໂຫຼດ inductive ສູງ, ເພີ່ມຂອບນັ້ນເປັນ 2×. ຄວາມສາມາດພິເສດຊື້ທ່ານປີຂອງການບໍລິການທີ່ເຊື່ອຖືໄດ້ແທນທີ່ຈະເປັນການເຊື່ອມໂລຫະຕິດຕໍ່ກ່ອນໄວອັນຄວນຫຼື pitting.
ບ່ອນທີ່ Cam Switches Excel: ຄໍາຮ້ອງສະຫມັກໃນໂລກທີ່ແທ້ຈິງ
ສະວິດ Cam ສ່ອງແສງໃນສະຖານະການທີ່ຕ້ອງການການຄວບຄຸມຄູ່ມື, ຫຼາຍຕໍາແຫນ່ງແລະອັດຕະໂນມັດບໍ່ໄດ້ຖືກຕ້ອງ—ຫຼືບ່ອນທີ່ການຄວບຄຸມຜູ້ປະຕິບັດງານໂດຍກົງແມ່ນຄວາມປອດໄພຫຼືຄວາມຕ້ອງການໃນການດໍາເນີນງານ. ນີ້ແມ່ນຄໍາຮ້ອງສະຫມັກອຸດສາຫະກໍາທົ່ວໄປທີ່ສຸດ.
ການຄວບຄຸມມໍເຕີແລະການປີ້ນກັບກັນ
ສະວິດ Cam ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງສໍາລັບການຄວບຄຸມມໍເຕີຄູ່ມື, ໂດຍສະເພາະບ່ອນທີ່ຜູ້ປະຕິບັດງານຕ້ອງການເລີ່ມຕົ້ນ, ຢຸດ, ແລະປີ້ນກັບມໍເຕີຈາກສະຖານີຄວບຄຸມທ້ອງຖິ່ນ. ສາຍພານລໍາລຽງ, hoists, cranes, ເຄື່ອງມືເຄື່ອງຈັກ, ແລະພັດລົມລະບາຍອາກາດທັງຫມົດໄດ້ຮັບຜົນປະໂຫຍດຈາກການຄວບຄຸມສະວິດ cam. ຄວາມຫນ້າເຊື່ອຖືທາງດ້ານກົນຈັກແລະຄໍາຄຶດຄໍາເຫັນ tactile ໃຫ້ຜູ້ປະຕິບັດງານມີຄວາມຫມັ້ນໃຈວ່າສະວິດຢູ່ໃນສະຖານະທີ່ຕ້ອງການ—ບໍ່ມີການລໍຖ້າສໍາລັບ coil relay ເພື່ອ energize, ບໍ່ມີ glitches ຊອບແວ, ພຽງແຕ່ການເຊື່ອມຕໍ່ໄຟຟ້າໂດຍກົງຈາກຕໍາແຫນ່ງ handle ກັບມໍເຕີ.
ການໂອນພະລັງງານຄູ່ມື (ການປ່ຽນແປງ)
ໃນສະຖານທີ່ທີ່ມີເຄື່ອງກໍາເນີດໄຟຟ້າສໍາຮອງຫຼືແຫຼ່ງພະລັງງານຄູ່, ສະວິດການໂອນຄູ່ມື (ປະເພດສະເພາະຂອງສະວິດ cam) ຊ່ວຍໃຫ້ຜູ້ປະຕິບັດງານສາມາດປ່ຽນລະຫວ່າງພະລັງງານຕົ້ນຕໍແລະພະລັງງານເຄື່ອງກໍາເນີດໄຟຟ້າໄດ້ຢ່າງປອດໄພ. ໂປຣໄຟລ໌ cam ຮັບປະກັນວ່າທັງສອງແຫຼ່ງບໍ່ເຄີຍເຊື່ອມຕໍ່ພ້ອມໆກັນ, ປ້ອງກັນການ backfeed ທີ່ສາມາດທໍາລາຍອຸປະກອນຫຼືເປັນອັນຕະລາຍຕໍ່ພະນັກງານສາທາລະນູປະໂພກ. ສະວິດເຫຼົ່ານີ້ແມ່ນຕ້ອງການໂດຍລະຫັດໃນເຂດອໍານາດຕັດສິນຈໍານວນຫຼາຍແລະສະຫນອງວິທີການທີ່ເບິ່ງເຫັນໄດ້, lockable ຂອງການແຍກແຫຼ່ງພະລັງງານໃນລະຫວ່າງການບໍາລຸງຮັກສາ.
ການເລືອກເຄື່ອງມື (Voltmeters, Ammeters)
ລະບົບສາມເຟດມັກຈະໃຊ້ເຄື່ອງວັດແທກດຽວທີ່ມີສະວິດເລືອກ cam-operated ເພື່ອວັດແທກແຮງດັນຫຼືກະແສໃນແຕ່ລະໄລຍະ. ນີ້ປະຫຍັດພື້ນທີ່ກະດານແລະຄ່າໃຊ້ຈ່າຍເມື່ອທຽບກັບການຕິດຕັ້ງສາມແມັດແຍກຕ່າງຫາກ. ຜູ້ປະຕິບັດງານ rotates selector ກັບ L1, L2, ຫຼື L3, ແລະແມັດສະແດງມູນຄ່າທີ່ສອດຄ້ອງກັນ. ເນື່ອງຈາກວ່າສະວິດເຫຼົ່ານີ້ປະຕິບັດກະແສໄຟຟ້າຫນ້ອຍທີ່ສຸດ (ສະວິດ voltmeter) ຫຼືກະແສໄຟຟ້າຕົວຈິງ (ສະວິດ ammeter), ພວກມັນຖືກລະບຸຕາມຄວາມເຫມາະສົມ—ແບບຈໍາລອງກະແສໄຟຟ້າຕ່ໍາສໍາລັບການວັດແທກແຮງດັນ, ແບບຈໍາລອງກະແສໄຟຟ້າສູງສໍາລັບຫນ້າທີ່ ammeter.
ການແຍກສຸກເສີນແລະການບໍາລຸງຮັກສາ
ສະວິດ Cam ໃຫ້ບໍລິການເປັນສະວິດ disconnect ຄູ່ມືສໍາລັບການແຍກອຸປະກອນໃນລະຫວ່າງການບໍາລຸງຮັກສາ. ບໍ່ເຫມືອນກັບເຄື່ອງຕັດວົງຈອນ, ເຊິ່ງສາມາດຖືກຕັ້ງຄ່າໃຫມ່ໂດຍບັງເອີນ, ສະວິດ cam ຮຽກຮ້ອງໃຫ້ມີການຫມຸນຄູ່ມືໂດຍເຈດຕະນາແລະສາມາດຖືກລັອກຢູ່ໃນຕໍາແຫນ່ງ OFF ດ້ວຍ padlock (ຫຼາຍແບບມີຂໍ້ກໍານົດ lockout). ນີ້ເຮັດໃຫ້ພວກເຂົາເຫມາະສົມສໍາລັບ The Safety Lockout: ຮັບປະກັນວ່າພະລັງງານຍັງຄົງປິດໃນຂະນະທີ່ນັກວິຊາການເຮັດວຽກກ່ຽວກັບອຸປະກອນ.
ກະດານຄວບຄຸມຫຼາຍຫນ້າທີ່
ໃນຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການການເລືອກຮູບແບບ—AUTO/MANUAL/TEST, ຕົວຢ່າງ—ສະວິດ cam ສະຫນອງການໂຕ້ຕອບທີ່ງ່າຍດາຍ, intuitive. ແຕ່ລະໂຫມດກະຕຸ້ນຊຸດວົງຈອນທີ່ແຕກຕ່າງກັນ, ເປີດໃຊ້ຫຼືປິດການໃຊ້ງານອັດຕະໂນມັດ, ປ່ຽນການຄວບຄຸມຈາກ PLC ໄປຫາປຸ່ມກົດທ້ອງຖິ່ນ, ຫຼືເສັ້ນທາງສັນຍານໄປຫາຜົນຜະລິດທີ່ແຕກຕ່າງກັນ. detents ກົນຈັກຮັບປະກັນວ່າຜູ້ປະຕິບັດງານສາມາດຮູ້ສຶກວ່າແຕ່ລະຕໍາແຫນ່ງ, ເຖິງແມ່ນວ່າຢູ່ໃນສະພາບແວດລ້ອມທີ່ມີການເບິ່ງເຫັນຕ່ໍາ.

Cam Switch vs. Contactor: ອັນໃດທີ່ທ່ານຕ້ອງການ?
ອຸປະກອນທັງສອງປ່ຽນວົງຈອນໄຟຟ້າ, ແຕ່ພວກມັນຖືກອອກແບບມາສໍາລັບ paradigms ການຄວບຄຸມທີ່ແຕກຕ່າງກັນໂດຍພື້ນຖານ. ເລືອກຜິດແລະທ່ານຈະ over-complicate ລະບົບຫຼືເສຍສະລະການເຮັດວຽກ.
ຄວາມແຕກຕ່າງຫຼັກ
ສະວິດ Cam ແມ່ນສະວິດຫຼາຍຕໍາແຫນ່ງທີ່ດໍາເນີນການດ້ວຍຕົນເອງສໍາລັບການຄວບຄຸມຜູ້ປະຕິບັດງານທ້ອງຖິ່ນ. ຫັນ handle, ແລະວົງຈອນປ່ຽນ. ຜູ້ປະຕິບັດງານແມ່ນໂດຍກົງໃນ loop.
ຜູ້ຕິດຕໍ່ ແມ່ນສະວິດທີ່ດໍາເນີນການດ້ວຍໄຟຟ້າ, ຄວບຄຸມຈາກໄລຍະໄກສໍາລັບການຄວບຄຸມອັດຕະໂນມັດຫຼືຫ່າງໄກ. ສັນຍານພະລັງງານຕ່ໍາ (ຈາກ PLC, ປຸ່ມກົດ, ຫຼື relay) energizes coil, ເຊິ່ງປິດການຕິດຕໍ່ຕົ້ນຕໍ. ຜູ້ປະຕິບັດງານແມ່ນທາງອ້ອມໃນ loop.
ເມື່ອເລືອກສະວິດ Cam
- ການຄວບຄຸມຄູ່ມືແມ່ນຕ້ອງການຫຼືຕ້ອງການ: ຜູ້ປະຕິບັດງານຕ້ອງການການຄວບຄຸມໂດຍກົງ, tactile ຫຼາຍກວ່າວົງຈອນ.
- ຫຼາຍຕໍາແຫນ່ງຫຼືການປ່ຽນສະລັບສັບຊ້ອນ: ທ່ານຈໍາເປັນຕ້ອງປະສານງານວົງຈອນຫຼາຍທີ່ມີການປະຕິບັດດຽວ (ຕົວຢ່າງ, ການປີ້ນກັບມໍເຕີ, ການເລືອກຮູບແບບ, ການປ່ຽນແຫຼ່ງພະລັງງານ).
- ຄວາມຫນ້າເຊື່ອຖືສູງ, ການບໍາລຸງຮັກສາຕ່ໍາ: ບໍ່ມີ coil ທີ່ຈະເຜົາໄຫມ້ອອກ, ບໍ່ມີການຕິດຕໍ່ຊ່ວຍທີ່ຈະລົ້ມເຫລວ, ພຽງແຕ່ຄວາມງ່າຍດາຍກົນຈັກ.
- ການຢືນຢັນດ້ວຍສາຍຕາ: ຕຳແໜ່ງຂອງມືຈັບສະແດງສະຖານະຂອງວົງຈອນໄດ້ຢ່າງວ່ອງໄວ.
- ບໍ່ມີພື້ນຖານໂຄງລ່າງອັດຕະໂນມັດ: ບໍ່ມີ PLC, ບໍ່ມີວົງຈອນຄວບຄຸມ, ພຽງແຕ່ການປ້ອນຂໍ້ມູນໂດຍກົງຈາກຜູ້ປະຕິບັດງານ.
- ແອັບພລິເຄຊັນທີ່ອ່ອນໄຫວຕໍ່ຄ່າໃຊ້ຈ່າຍ: ໂດຍທົ່ວໄປແລ້ວ, ສະວິດ Cam ມີລາຄາຖືກກວ່າລະບົບທີ່ໃຊ້ Contactors ສໍາລັບການຄວບຄຸມຄູ່ມືແບບງ່າຍດາຍ.
ເວລາທີ່ຈະເລືອກ Contactor
- ການຄວບຄຸມທາງໄກ ຫຼື ອັດຕະໂນມັດ: ການປະຕິບັດການປ່ຽນຈໍາເປັນຕ້ອງເກີດຂຶ້ນຈາກໄລຍະໄກ ຫຼື ອີງຕາມເຫດຜົນອັດຕະໂນມັດ (PLC, ຕົວຈັບເວລາ, ເຊັນເຊີ).
- ໂຫຼດພະລັງງານສູງ: Contactors ຖືກອອກແບບສະເພາະສໍາລັບໜ້າທີ່ເລີ່ມຕົ້ນມໍເຕີໜັກ ແລະ ສາມາດຮອງຮັບໄດ້ຫຼາຍພັນແອມແປ.
- ການປ່ຽນເລື້ອຍໆ, ຮອບວຽນສູງ: Contactors ຖືກສ້າງຂຶ້ນສໍາລັບຫຼາຍຮ້ອຍພັນ ຫຼື ລ້ານການດໍາເນີນງານໄຟຟ້າພາຍໃຕ້ການໂຫຼດ.
- ການເຊື່ອມຕໍ່ຄວາມປອດໄພກັບອັດຕະໂນມັດ: ທ່ານຕ້ອງການໃຫ້ສະວິດຖືກຄວບຄຸມໂດຍ Relay ຄວາມປອດໄພ, ວົງຈອນຢຸດສຸກເສີນ, ຫຼື Process Interlocks.
- ການຄວບຄຸມອຸປະກອນຫຼາຍອັນທີ່ປະສານງານກັນ: ເມື່ອ Contactors ຫຼາຍອັນ, Overload Relays, ແລະ ຕົວຈັບເວລາເຮັດວຽກຮ່ວມກັນໃນ Motor Starter ຫຼື ລະບົບຄວບຄຸມ.
ທ່ານສາມາດໃຊ້ທັງສອງໄດ້ບໍ?
ແນ່ນອນ. ລະບົບຄວບຄຸມມໍເຕີຫຼາຍອັນໃຊ້ສະວິດ Cam ສໍາລັບການຄວບຄຸມຄູ່ມືໃນທ້ອງຖິ່ນ (FORWARD-OFF-REVERSE) ແລະ Contactors ສໍາລັບການຄວບຄຸມທາງໄກອັດຕະໂນມັດ. ສະວິດ Cam ອາດຈະຂ້າມຜ່ານອັດຕະໂນມັດທັງໝົດ (ການປ່ຽນແທນຄູ່ມື) ຫຼື ມັນອາດຈະເປີດ/ປິດ Coils Contactors, ຂຶ້ນກັບການອອກແບບ. ສິ່ງທີ່ສໍາຄັນແມ່ນການເຂົ້າໃຈວ່າອຸປະກອນໃດຈັດການໜ້າທີ່ໃດ.
专业提示: ຖ້າແອັບພລິເຄຊັນຂອງທ່ານຕ້ອງການທັງການຄວບຄຸມຄູ່ມືໃນທ້ອງຖິ່ນ ແລະ ການຄວບຄຸມອັດຕະໂນມັດທາງໄກ, ພິຈາລະນາສະວິດ Cam ທີ່ມີ Auxiliary Contacts ທີ່ເຊື່ອມຕໍ່ກັບ Contactor. ຕໍາແໜ່ງສະວິດ Cam ສາມາດເປີດ ຫຼື ປິດ Coil Contactor, ໃຫ້ຜູ້ປະຕິບັດງານມີອໍານາດສຸດທ້າຍໃນຂະນະທີ່ຮັກສາຄວາມສາມາດອັດຕະໂນມັດ. ວິທີການປະສົມນີ້ແມ່ນທົ່ວໄປໃນ Hoists, Conveyors, ແລະ ອຸປະກອນ Process ບ່ອນທີ່ຕ້ອງການທັງໂໝດຄູ່ມື ແລະ ອັດຕະໂນມັດ.
ການເລືອກສະວິດ Cam ທີ່ຖືກຕ້ອງ: ຂໍ້ຄວນພິຈາລະນາທີ່ສໍາຄັນ
ເມື່ອທ່ານໄດ້ກໍານົດວ່າສະວິດ Cam ເປັນວິທີແກ້ໄຂທີ່ຖືກຕ້ອງ, ນີ້ແມ່ນວິທີການລະບຸອຸປະກອນທີ່ຈະເຮັດວຽກຕົວຈິງໃນແອັບພລິເຄຊັນຂອງທ່ານ.
- ກໍານົດລໍາດັບການປ່ຽນ: ເລີ່ມຕົ້ນໂດຍການສ້າງແຜນທີ່ສິ່ງທີ່ແຕ່ລະຕໍາແໜ່ງຕ້ອງການເຮັດ. Contacts ໃດປິດໃນຕໍາແໜ່ງ 1? ອັນໃດເປີດ? ເຮັດສິ່ງນີ້ສໍາລັບທຸກໆຕໍາແໜ່ງ. ຜູ້ຜະລິດສ່ວນໃຫຍ່ສະຫນອງຕາຕະລາງການປ່ຽນ ຫຼື ຊອບແວການຕັ້ງຄ່າເພື່ອຊ່ວຍແປຄວາມຕ້ອງການຂອງທ່ານໃຫ້ເປັນ Cam Profile.
- ກໍານົດການຕັ້ງຄ່າ Pole ແລະ Throw: ນັບຈໍານວນວົງຈອນເອກະລາດທີ່ທ່ານກໍາລັງຄວບຄຸມ (Poles) ແລະ ຈໍານວນ Output States ທີ່ແຕ່ລະວົງຈອນຕ້ອງການ (Throws). ສະວິດປີ້ນກັບມໍເຕີໂດຍທົ່ວໄປຕ້ອງການ 3 Poles (ໜຶ່ງຕໍ່ເຟດ) ແລະ 2 Throws (ໄປໜ້າ ແລະ ປີ້ນກັບ), ບວກກັບຕໍາແໜ່ງ OFF—ເຮັດໃຫ້ມັນເປັນສະວິດ 3-Pole, 3-Position.
- ເລືອກຄ່າໄຟຟ້າ: ຈັບຄູ່ແຮງດັນ ແລະ ຄ່າກະແສໄຟຟ້າກັບການໂຫຼດຂອງທ່ານ, ແລະ ກວດເບິ່ງ Utilization Category ສະເໝີ. ສໍາລັບການໂຫຼດມໍເຕີ, ໃຫ້ລະບຸສໍາລັບໜ້າທີ່ AC-3 ທີ່ 1.5-2× ຂອງມໍເຕີ FLA. ສໍາລັບການໂຫຼດ Resistive, ໜ້າທີ່ AC-1 ທີ່ 1.2× ຂອງກະແສໄຟຟ້າໂຫຼດແມ່ນພຽງພໍ.
- ພິຈາລະນາການປ້ອງກັນສິ່ງແວດລ້ອມ: ແຜງສະອາດພາຍໃນ? IP20 ແມ່ນດີ. ສະພາບແວດລ້ອມກາງແຈ້ງ ຫຼື ລ້າງອອກ? ໄປ IP65 ຫຼື IP67. ຄ່າ IP ຕ້ອງຄໍານຶງເຖິງການຕັ້ງຄ່າທີ່ຕິດຕັ້ງ—ຖ້າທ່ານກໍາລັງຕິດຕັ້ງສະວິດຜ່ານປະຕູແຜງ, ໃຫ້ແນ່ໃຈວ່າການບີບອັດ Gasket ທີ່ເຫມາະສົມ ແລະ ວ່າ Cable Entries ທີ່ບໍ່ໄດ້ໃຊ້ຖືກປິດ.
- ກວດສອບຄວາມທົນທານກົນຈັກ: ຊອກຫາຄ່າ Mechanical Life ຂອງ 500,000 ການດໍາເນີນງານຂັ້ນຕ່ໍາສໍາລັບແອັບພລິເຄຊັນອຸດສາຫະກໍາ. Electrical Life ຈະຕ່ໍາກວ່າ (ໂດຍທົ່ວໄປ 50,000 ຫາ 200,000 ການດໍາເນີນງານພາຍໃຕ້ການໂຫຼດທີ່ໄດ້ຮັບການຈັດອັນດັບ), ແຕ່ນັ້ນແມ່ນເລື່ອງປົກກະຕິ—ການສວມໃສ່ Contact ແມ່ນຫຼີກລ່ຽງບໍ່ໄດ້.
- ກວດສອບການປະຕິບັດຕາມມາດຕະຖານ: ຮັບປະກັນວ່າສະວິດໄດ້ຮັບການຢັ້ງຢືນຕາມ IEC 60947-3 (ຫຼື UL 508 ສໍາລັບແອັບພລິເຄຊັນອາເມລິກາເໜືອ). ຊອກຫາເຄື່ອງໝາຍ CE (ເອີຣົບ), ລາຍຊື່ UL (ອາເມລິກາ), ຫຼື ການຢັ້ງຢືນ CSA (ການາດາ) ຂຶ້ນກັບຕະຫຼາດຂອງທ່ານ.
专业提示: ຖ້າແອັບພລິເຄຊັນຂອງທ່ານກ່ຽວຂ້ອງກັບ Custom Switching Logic, ເຮັດວຽກຮ່ວມກັບຜູ້ຜະລິດໃນຕົ້ນໄລຍະການອອກແບບ. ສະວິດ Cam ສາມາດປັບແຕ່ງໄດ້ສູງ, ແຕ່ການປັບແຕ່ງນັ້ນເກີດຂຶ້ນຢູ່ໂຮງງານ—Cam Profiles ຖືກກັດ, ບໍ່ສາມາດຕັ້ງໂປຣແກຣມໄດ້ໃນພາກສະໜາມ. ໃຫ້ຕາຕະລາງການປ່ຽນລາຍລະອຽດທີ່ສະແດງໃຫ້ເຫັນວ່າ Contacts ໃດປິດໃນແຕ່ລະຕໍາແໜ່ງ, ແລະ ຜູ້ຜະລິດສາມາດອອກແບບ Cam Profile ໃຫ້ກົງກັນໄດ້.
ມາດຕະຖານ ແລະ ການຢັ້ງຢືນ
ສະວິດ Cam ທີ່ຂາຍສໍາລັບການນໍາໃຊ້ອຸດສາຫະກໍາຕ້ອງປະຕິບັດຕາມມາດຕະຖານຄວາມປອດໄພສາກົນ ແລະ ພາກພື້ນ. ມາດຕະຖານຫຼັກແມ່ນ IEC 60947-3: ເຄື່ອງປ່ຽນໄຟຟ້າແຮງດັນຕ່ໍາ ແລະ ເຄື່ອງຄວບຄຸມ – ພາກທີ 3: ສະວິດ, ຕົວຕັດການເຊື່ອມຕໍ່, ສະວິດ-ຕົວຕັດການເຊື່ອມຕໍ່ ແລະ ໜ່ວຍປະສົມຟິວ. ມາດຕະຖານນີ້, ຈັດພິມໂດຍຄະນະກໍາມາທິການໄຟຟ້າສາກົນ, ກໍານົດຂໍ້ກໍານົດສໍາລັບສະວິດ, ຕົວຕັດການເຊື່ອມຕໍ່, ແລະ ອຸປະກອນທີ່ຄ້າຍຄືກັນທີ່ໃຊ້ໃນວົງຈອນສູງເຖິງ 1,000V AC ຫຼື 1,500V DC.
ມາຮອດເດືອນພະຈິກ 2025, ສະບັບປັດຈຸບັນແມ່ນ IEC 60947-3:2020, ດ້ວຍການແກ້ໄຂ (IEC 60947-3:2020/AMD1:2025) ຈັດພິມໃນເດືອນພຶດສະພາ 2025. ການແກ້ໄຂນີ້ແນະນໍາການອັບເດດທີ່ສໍາຄັນຫຼາຍຢ່າງ:
- ການທົດສອບກະແສໄຟຟ້າໂຫຼດທີ່ສໍາຄັນສໍາລັບສະວິດ DC: ຂັ້ນຕອນການທົດສອບໃຫມ່ສໍາລັບການປະເມີນຜົນການປະຕິບັດການປ່ຽນ DC, ແກ້ໄຂສິ່ງທ້າທາຍຂອງການດັບ Arc ໂດຍບໍ່ມີ Zero-Crossing.
- ຄ່າ Short-Circuit ຕາມເງື່ອນໄຂສໍາລັບສະວິດທີ່ປ້ອງກັນໂດຍ ເຄື່ອງຕັດວົງຈອນ: ຄໍາແນະນໍາສໍາລັບການປະສານງານສະວິດ Cam ກັບອຸປະກອນປ້ອງກັນ Upstream.
- ປະເພດໃຫມ່ສໍາລັບມໍເຕີປະສິດທິພາບສູງ: ການຮັບຮູ້ປະເພດມໍເຕີທີ່ທັນສະໄຫມທີ່ມີລັກສະນະເລີ່ມຕົ້ນທີ່ແຕກຕ່າງກັນ.
- Annexes ໃຫມ່: Annex E ກວມເອົາການເຊື່ອມຕໍ່ຕົວນໍາອາລູມິນຽມ; Annex F ແກ້ໄຂການວັດແທກການສູນເສຍພະລັງງານ.
ການອັບເດດເຫຼົ່ານີ້ສະທ້ອນໃຫ້ເຫັນເຖິງຄວາມຕ້ອງການທີ່ພັດທະນາຂອງລະບົບໄຟຟ້າອຸດສາຫະກໍາ ແລະ ຮັບປະກັນວ່າສະວິດ Cam ທີ່ທັນສະໄຫມຕອບສະໜອງຄວາມຄາດຫວັງດ້ານຄວາມປອດໄພ ແລະ ປະສິດທິພາບໃນປະຈຸບັນ.
ນອກເໜືອໄປຈາກ IEC 60947-3, ໃຫ້ຊອກຫາການຢັ້ງຢືນຕໍ່ໄປນີ້:
- ເຄື່ອງໝາຍ CE (ເອີຣົບ): ຊີ້ບອກເຖິງການປະຕິບັດຕາມຄໍາສັ່ງຂອງ EU ສໍາລັບຄວາມປອດໄພ ແລະ ຄວາມເຂົ້າກັນໄດ້ທາງແມ່ເຫຼັກໄຟຟ້າ.
- ລາຍຊື່ UL 508 (ອາເມລິກາ): ການຢັ້ງຢືນ UL (Underwriters Laboratories) ສໍາລັບອຸປະກອນຄວບຄຸມອຸດສາຫະກໍາ.
- ການຢັ້ງຢືນ CSA (ການາດາ): ການອະນຸມັດຈາກສະມາຄົມມາດຕະຖານການາດາ.
- ເຄື່ອງໝາຍ CCC (ຈີນ): ໃບຢັ້ງຢືນບັງຄັບຂອງຈີນສໍາລັບຜະລິດຕະພັນທີ່ຂາຍໃນຕະຫຼາດຈີນ.
ກວດສອບສະເໝີວ່າຕົວແບບສະເພາະທີ່ທ່ານກໍາລັງລະບຸມີການຢັ້ງຢືນທີ່ຕ້ອງການສໍາລັບຕະຫຼາດ ແລະ ແອັບພລິເຄຊັນຂອງທ່ານ. ສະວິດທີ່ໄດ້ຮັບການຢັ້ງຢືນຕາມມາດຕະຖານ IEC ອາດຈະຍັງຕ້ອງການລາຍຊື່ UL ຫຼື CSA ເພີ່ມເຕີມສໍາລັບການຕິດຕັ້ງໃນອາເມລິກາເໜືອ, ແລະ ໃນທາງກັບກັນ.
ສະຫລຸບ
ສະວິດ Cam ເປັນອຸປະກອນທີ່ລຽບງ່າຍທີ່ແກ້ໄຂບັນຫາການຄວບຄຸມທີ່ສັບສົນຜ່ານຄວາມສະຫງ່າງາມທາງກົນຈັກ. Cam ທີ່ກັດຢ່າງຊັດເຈນ, ຊຸດຂອງ Contact Blocks, ແລະ ກົນໄກ Detent ໃຫ້ການຄວບຄຸມຫຼາຍຕໍາແໜ່ງ, ຫຼາຍວົງຈອນທີ່ເຊື່ອຖືໄດ້, ສໍາຜັດໄດ້, ແລະ ເປັນໄປບໍ່ໄດ້ທີ່ຈະຕັ້ງຄ່າຜິດພາດໂດຍບັງເອີນ. ບໍ່ມີການອັບເດດເຟີມແວ, ບໍ່ມີຂໍ້ບົກພ່ອງຂອງຊອບແວ, ພຽງແຕ່ເຫດຜົນການປ່ຽນທີ່ກໍານົດໄວ້ທີ່ຖືກລັອກໄວ້ໃນ Cam Profile.
ພວກມັນບໍ່ແມ່ນເຄື່ອງມືທີ່ຖືກຕ້ອງສໍາລັບທຸກໆວຽກ. ຖ້າທ່ານຕ້ອງການການຄວບຄຸມທາງໄກ ຫຼື ອັດຕະໂນມັດ, ທ່ານຕ້ອງການ Contactors ແລະ Relays. ຖ້າທ່ານກໍາລັງປ່ຽນການໂຫຼດມໍເຕີຂະໜາດໃຫຍ່ ຫຼື ຕ້ອງການຫຼາຍຮ້ອຍພັນຮອບວຽນໄຟຟ້າພາຍໃຕ້ໜ້າທີ່ Inductive ໜັກ, Contactors ຖືກສ້າງຂຶ້ນເພື່ອຈຸດປະສົງນັ້ນ. ແຕ່ເມື່ອແອັບພລິເຄຊັນຂອງທ່ານຕ້ອງການການຄວບຄຸມຄູ່ມື, ຫຼາຍຕໍາແໜ່ງ ທີ່ມີລໍາດັບການປ່ຽນທີ່ສັບສົນ—ການປີ້ນກັບມໍເຕີ, ການປ່ຽນແຫຼ່ງພະລັງງານ, ການເລືອກເຄື່ອງມື, ການປ່ຽນໂໝດ—ສະວິດ Cam ແມ່ນບໍ່ມີໃຜທຽບໄດ້.
ກໍານົດສະເພາະໃຫ້ຖືກຕ້ອງ. ຈັບຄູ່ປະເພດການໂຫຼດຂອງທ່ານກັບປະເພດການນໍາໃຊ້. ຫຼຸດອັດຕາສໍາລັບອຸນຫະພູມແລະລະດັບຄວາມສູງ. ກວດສອບວ່າໂປຣໄຟລ໌ cam ກົງກັບຕາຕະລາງການປ່ຽນຂອງທ່ານກ່ອນທີ່ທ່ານຈະເລີ່ມຕົ້ນ. ແລະຈົ່ງຈື່ໄວ້ວ່າ: ຕໍາແຫນ່ງຈັບນັ້ນບໍ່ແມ່ນພຽງແຕ່ຕົວຊີ້ບອກເທົ່ານັ້ນ—ມັນ ແມ່ນ ສະຖານະຂອງວົງຈອນ. ນັ້ນແມ່ນປະເພດຂອງຄວາມແນ່ນອນທີ່ທ່ານບໍ່ສາມາດໄດ້ຮັບຈາກຫນ້າຈໍ.
ຕ້ອງການຄວາມຊ່ວຍເຫຼືອໃນການເລືອກສະວິດ cam ຫຼືອົງປະກອບຄວບຄຸມອື່ນໆສໍາລັບໂຄງການຕໍ່ໄປຂອງທ່ານ? ການຕິດຕໍ່ VIOX ທີມງານວິສະວະກໍາຄໍາຮ້ອງສະຫມັກຂອງ Electric ສໍາລັບການສະຫນັບສະຫນູນດ້ານວິຊາການ, ຫຼືຄົ້ນຫາສາຍເຕັມຂອງອຸປະກອນປ່ຽນແລະອົງປະກອບສະຖານີຄວບຄຸມທີ່ໄດ້ຮັບການຢັ້ງຢືນ IEC 60947 ຂອງພວກເຮົາ.
