
เหตุใดการตั้งค่า Trip Unit ของ MCCB จึงมีความสำคัญ: รากฐานของการป้องกันทางไฟฟ้า
ระบบจ่ายไฟฟ้าที่ทันสมัยต้องการการป้องกันที่แม่นยำและเชื่อถือได้จากสภาวะกระแสเกินและไฟฟ้าลัดวงจร หัวใจสำคัญของการป้องกันนี้คือ molded case circuit breaker (MCCB) trip unit ซึ่งเป็น “สมอง” ที่กำหนดว่าเบรกเกอร์จะตอบสนองต่อสภาวะความผิดปกติเมื่อใดและรวดเร็วเพียงใด แตกต่างจากเซอร์กิตเบรกเกอร์ขนาดเล็กแบบ fixed-trip, MCCB รถมอเตอร์ไซค์ ที่ติดตั้ง trip unit ที่ปรับได้ ช่วยให้วิศวกรมีความยืดหยุ่นในการปรับแต่งคุณลักษณะการป้องกันให้เหมาะสมกับการใช้งานเฉพาะ ปรับการประสานงานระหว่างอุปกรณ์ป้องกันให้เหมาะสม และป้องกันการหยุดทำงานที่ไม่จำเป็นจากการทริปที่ก่อให้เกิดความรำคาญ.
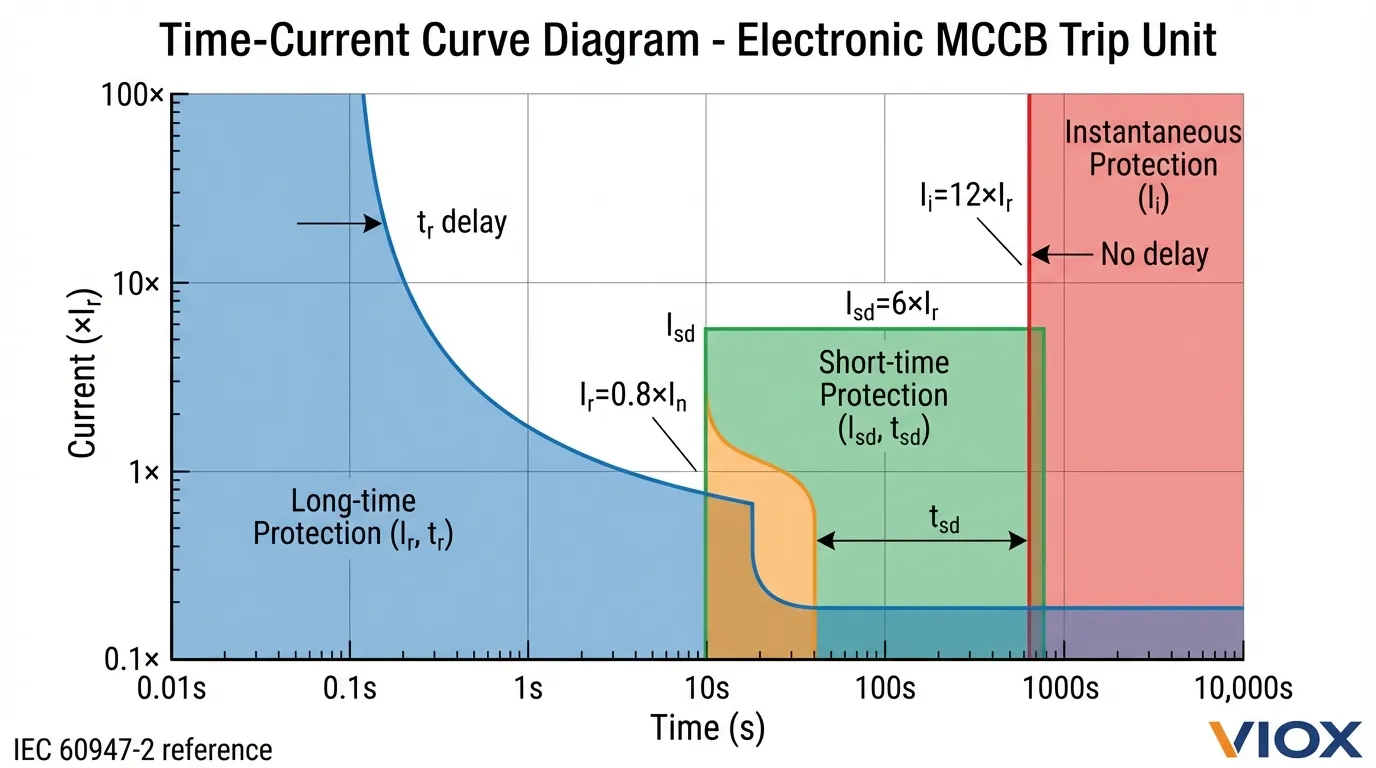
การทำความเข้าใจพารามิเตอร์พื้นฐานสี่ประการของ trip unit—Ir (การป้องกันกระแสเกิน), Im (การป้องกันกระแสลัดวงจร), Isd (กระแสเริ่มทำงานของการป้องกันกระแสลัดวงจร) และ Ii (การป้องกันกระแสลัดวงจรทันที)—เป็นสิ่งสำคัญสำหรับทุกคนที่เกี่ยวข้องกับการออกแบบระบบไฟฟ้า การสร้างแผงควบคุม หรือการบำรุงรักษาสิ่งอำนวยความสะดวก การตั้งค่าที่ไม่เหมาะสมอาจส่งผลให้การป้องกันไม่เพียงพอ ความล้มเหลวในการประสานงาน หรือการทริปผิดพลาดบ่อยครั้งที่รบกวนการดำเนินงาน คู่มือฉบับสมบูรณ์นี้จะอธิบายแต่ละพารามิเตอร์ ให้วิธีการคำนวณที่เป็นประโยชน์ และแสดงให้เห็นถึงวิธีการกำหนดค่า VIOX trip unit ของ MCCB เพื่อประสิทธิภาพและความปลอดภัยสูงสุด.

Thermal-Magnetic vs. Electronic Trip Units: ทำความเข้าใจเทคโนโลยี
ก่อนที่จะเจาะลึกพารามิเตอร์เฉพาะ สิ่งสำคัญคือต้องเข้าใจหลักสองประการ ประเภทของเซอร์กิตเบรกเกอร์ เทคโนโลยี trip และความแตกต่างในด้านฟังก์ชันการทำงานและความสามารถในการปรับ.
ตารางที่ 1: การเปรียบเทียบ Thermal-Magnetic vs. Electronic Trip Unit
| คุณสมบัติ | Thermal-Magnetic Trip Unit | Electronic Trip Unit |
|---|---|---|
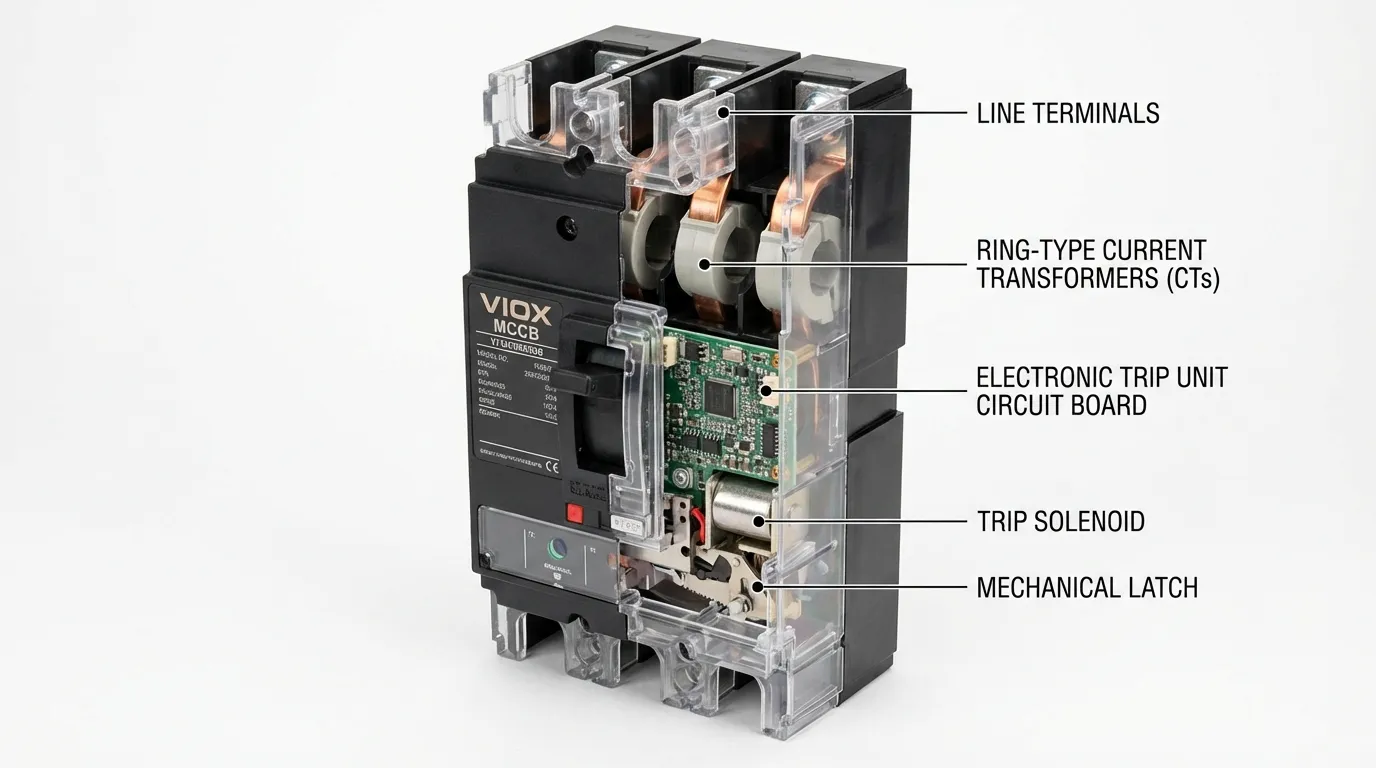
| หลักการทำงาน | แถบไบเมทัล (ความร้อน) + ขดลวดแม่เหล็กไฟฟ้า (แม่เหล็ก) | หม้อแปลงกระแส (CTs) + ไมโครโปรเซสเซอร์ |
| การปรับ Ir | จำกัดหรือคงที่ (โดยทั่วไป 0.7-1.0 × In) | ช่วงกว้าง (โดยทั่วไป 0.4-1.0 × In) |
| การปรับ Isd | ไม่สามารถใช้ได้ (รวมกับ Ii) | ปรับได้อย่างเต็มที่ (1.5-10 × Ir) |
| การปรับ Ii | ช่วงคงที่หรือจำกัด (โดยทั่วไป 5-10 × In) | ช่วงกว้าง (2-15 × Ir หรือสูงกว่า) |
| การปรับ Time Delay | เส้นโค้งผกผันคงที่ | ปรับ tsd ได้ (โดยทั่วไป 0.05-0.5 วินาที) |
| การป้องกัน I²t | ไม่สามารถใช้งานได้ | มีในหน่วยขั้นสูง |
| ความแม่นยำ | ±20% โดยทั่วไป | ±5-10% โดยทั่วไป |
| ความไวต่ออุณหภูมิ | ได้รับผลกระทบจากอุณหภูมิแวดล้อม | ชดเชยด้วยระบบอิเล็กทรอนิกส์ |
| การป้องกันไฟฟ้ารั่ว | ต้องใช้โมดูลแยกต่างหาก | มักจะรวมเข้าด้วยกัน (การตั้งค่า Ig) |
| การแสดงผล/การวินิจฉัย | ไม่มี | จอ LCD, การบันทึกเหตุการณ์, การสื่อสาร |
| ค่าใช้จ่าย | ต่ำกว่า | สูงกว่า |
| คิดถึงเรื่องโปรแกรม | ตัวป้อนแบบง่าย โหลดคงที่ | มอเตอร์ เครื่องกำเนิดไฟฟ้า การประสานงานที่ซับซ้อน |
ข้อมูลเชิงลึกที่สำคัญ: Electronic trip units ให้ความยืดหยุ่นและความแม่นยำที่มากกว่า ทำให้เป็นสิ่งจำเป็นสำหรับการใช้งานที่ต้องการการประสานงานที่เข้มงวด การป้องกันมอเตอร์ หรือการรวมเข้ากับระบบการจัดการอาคาร VIOX นำเสนอทั้งสองเทคโนโลยี โดยแนะนำให้ใช้ electronic units สำหรับการติดตั้งที่ต้องการคุณสมบัติการป้องกันขั้นสูง.
พารามิเตอร์การป้องกันหลักสี่ประการ: Ir, Im, Isd และ Ii อธิบาย
ตารางที่ 2: ข้อมูลอ้างอิงด่วนของพารามิเตอร์ Trip Unit
| พารามิเตอร์ | ชื่อเต็ม | ฟังก์ชันการป้องกัน | ช่วงทั่วไป | ลักษณะเวลา | 主要用途 |
|---|---|---|---|---|---|
| Ir | กระแสเริ่มทำงานของการป้องกันกระแสเกิน | การป้องกันความร้อน/กระแสเกิน | 0.4-1.0 × In | เวลาผกผัน (tr) | ปกป้องตัวนำจากกระแสเกินที่ต่อเนื่อง |
| Im | การป้องกันกระแสลัดวงจร | N/A (รวมกับ Isd) | ไม่มีข้อมูล | ไม่มีข้อมูล | คำศัพท์เดิม ดู Isd |
| Isd | กระแสเริ่มทำงานของการป้องกันกระแสลัดวงจร | การป้องกันกระแสลัดวงจรพร้อมการหน่วงเวลา | 1.5-10 × Ir | เวลาที่แน่นอน (tsd) | อนุญาตให้อุปกรณ์ปลายน้ำเคลียร์ข้อผิดพลาดก่อน |
| Ii | กระแสตอบสนองทันที | การป้องกันไฟฟ้าลัดวงจรทันที | 2-15 × Ir (หรือสูงกว่า) | ไม่มีการหน่วงเวลา (<0.05 วินาที) | ป้องกันข้อผิดพลาดร้ายแรง |
| tr | การหน่วงเวลาแบบยาว | เวลาตัดวงจรเมื่อมีกระแสเกิน | เส้นโค้งผกผันคงที่ | ผกผัน (I²t) | ตรงกับความสามารถทางความร้อนของตัวนำ |
| tsd | การหน่วงเวลาแบบสั้น | การหน่วงเวลาไฟฟ้าลัดวงจร | 0.05-0.5 วินาที | เวลาที่แน่นอน | เปิดใช้งานการประสานงานแบบเลือกสรร |
หมายเหตุเกี่ยวกับคำศัพท์: คำว่า “Im” บางครั้งใช้สลับกันกับ “Isd” ในเอกสารเก่า แต่มาตรฐาน IEC 60947-2 และ UL 489 สมัยใหม่ส่วนใหญ่อ้างอิงถึง Isd สำหรับการตอบสนองแบบสั้น และ Ii สำหรับการตอบสนองทันที คู่มือนี้ใช้คำศัพท์มาตรฐานปัจจุบัน.
Ir (การป้องกันแบบยาว): การตั้งค่าพิกัดกระแสต่อเนื่อง
Ir แสดงถึงพิกัดกระแสต่อเนื่องของชุดทริป—กระแสสูงสุดที่เบรกเกอร์จะสามารถจ่ายได้อย่างต่อเนื่องโดยไม่ตัดวงจร นี่คือการตั้งค่าพื้นฐานที่สุดและต้องจับคู่กับโหลดและแอมแปร์ของตัวนำอย่างระมัดระวัง.
Ir ทำงานอย่างไร
ฟังก์ชันการป้องกันแบบยาวใช้แถบไบเมทัล (ความร้อน-แม่เหล็ก) หรือการตรวจจับทางอิเล็กทรอนิกส์ (ชุดทริปอิเล็กทรอนิกส์) เพื่อตรวจสอบกระแสโหลด เมื่อกระแสเกินการตั้งค่า Ir ลักษณะเวลาผกผันจะเริ่มขึ้น: ยิ่งกระแสเกินมากเท่าไหร่ การตัดวงจรก็จะยิ่งเร็วขึ้นเท่านั้น สิ่งนี้เลียนแบบพฤติกรรมทางความร้อนของตัวนำและอุปกรณ์ที่เชื่อมต่อ ให้เวลาสำหรับกระแสเกินชั่วคราว (การสตาร์ทมอเตอร์, กระแสไหลเข้าของหม้อแปลง) ในขณะที่ป้องกันกระแสเกินอย่างต่อเนื่องที่อาจทำให้ฉนวนเสียหาย.
การคำนวณ Ir
สูตรพื้นฐาน:
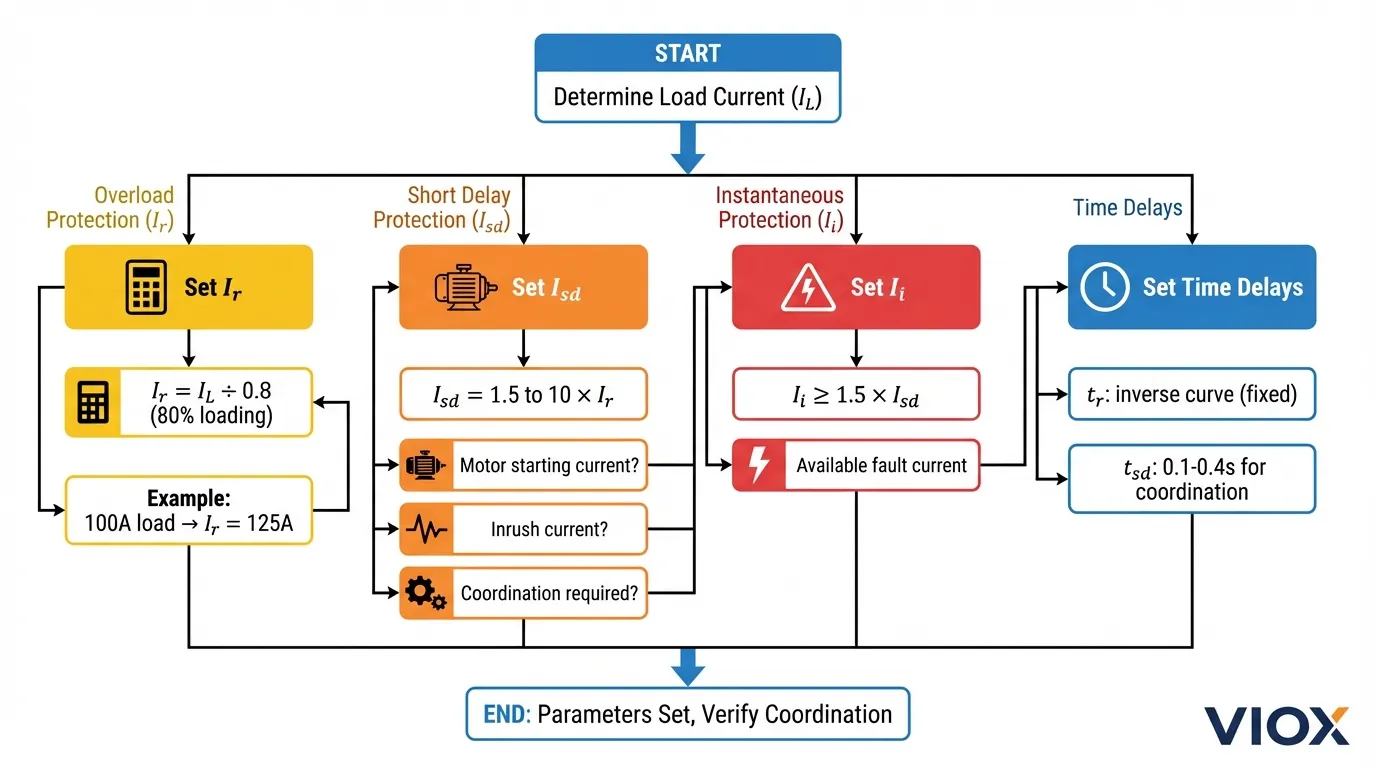
Ir = กระแสโหลด (IL) ÷ ปัจจัยโหลด
แนวทางปฏิบัติมาตรฐาน:
- สำหรับโหลดต่อเนื่อง:
Ir = IL ÷ 0.8(การโหลด 80% ตาม NEC/IEC) - สำหรับโหลดไม่ต่อเนื่อง:
Ir = IL ÷ 0.9(การโหลด 90% ที่ยอมรับได้)
ตัวอย่าง:
โหลดต่อเนื่อง 100A ต้องใช้: Ir = 100A ÷ 0.8 = 125A
หาก MCCB ของคุณมี In = 160A ให้ตั้งค่าหน้าปัด Ir เป็น: 125A ÷ 160A = 0.78 (ปัดเศษเป็นการตั้งค่าที่ใกล้เคียงที่สุด โดยทั่วไปคือ 0.8)
ข้อควรพิจารณาในการตั้งค่า Ir
- แอมแปร์ของตัวนำ: Ir ต้องไม่เกินแอมแปร์ของตัวนำที่เล็กที่สุดในวงจร
- อุณหภูมิโดยรอบ: ชุดทริปอิเล็กทรอนิกส์จะชดเชยโดยอัตโนมัติ หน่วยความร้อน-แม่เหล็กอาจต้องใช้ การลดพิกัด
- โหลดมอเตอร์: คำนึงถึงปัจจัยการใช้งานและระยะเวลาของกระแสเริ่มต้น
- การขยายตัวในอนาคต: วิศวกรบางคนตั้งค่า Ir ให้สูงขึ้นเล็กน้อยเพื่อรองรับการเติบโตของโหลด แต่สิ่งนี้ต้องไม่กระทบต่อการป้องกันตัวนำ
Isd (การตอบสนองแบบสั้น): การป้องกันไฟฟ้าลัดวงจรที่ประสานงาน
Isd กำหนดระดับกระแสที่การป้องกันแบบสั้นทำงาน ต่างจากการป้องกันทันที การป้องกันแบบสั้นรวมถึงการหน่วงเวลาโดยเจตนา (tsd) เพื่อให้อุปกรณ์ป้องกันปลายน้ำเคลียร์ข้อผิดพลาดก่อน—สาระสำคัญของ การประสานงานแบบเลือกสรร.
Isd ทำงานอย่างไร
เมื่อกระแสไฟฟ้าลัดวงจรเกินเกณฑ์ Isd ชุดทริปจะเริ่มจับเวลา (tsd) หากข้อผิดพลาดยังคงอยู่นานเกินการหน่วงเวลา tsd เบรกเกอร์จะตัดวงจร หากเบรกเกอร์ปลายน้ำเคลียร์ข้อผิดพลาดก่อนที่ tsd จะหมดอายุ เบรกเกอร์ต้นน้ำจะยังคงปิดอยู่ จำกัดการหยุดทำงานเฉพาะสาขาที่มีข้อผิดพลาด.
การคำนวณ Isd
สูตรพื้นฐาน:
Isd = (1.5 ถึง 10) × Ir
เกณฑ์การคัดเลือก:
- การตั้งค่าขั้นต่ำ: ต้องเกินกระแสชั่วขณะสูงสุดที่คาดไว้ (การสตาร์ทมอเตอร์, กระแสไหลเข้าของหม้อแปลง)
- การตั้งค่าสูงสุด: ต้องต่ำกว่ากระแสไฟฟ้าลัดวงจรที่มีอยู่ที่ตำแหน่งเบรกเกอร์
- ข้อกำหนดการประสานงาน: ต้องสูงกว่าการตั้งค่า Ii ของเบรกเกอร์ปลายน้ำ
ตัวอย่าง:
สำหรับ Ir = 400A:
- Isd ขั้นต่ำ:
1.5 × 400A = 600A(หลีกเลี่ยงการตัดวงจรที่ไม่พึงประสงค์จากกระแสไหลเข้า) - Isd ทั่วไป:
6 × 400A = 2,400A(ทั่วไปสำหรับการป้องกันฟีดเดอร์) - Isd สูงสุด: จำกัดโดยพิกัด การลัดวงจรของเบรกเกอร์ (Icu/Ics)
Isd เทียบกับ Ii: ควรใช้แบบไหนเมื่อใด
- ใช้ Isd (พร้อมการหน่วงเวลา tsd): บนเมนเบรกเกอร์และฟีดเดอร์เบรกเกอร์ที่ต้องการการเลือกเฟ้นกับอุปกรณ์ดาวน์สตรีม
- ใช้ Ii (ไม่มีการหน่วงเวลา): บนวงจรย่อยสุดท้ายที่ยอมรับการทริปทันทีได้ และไม่ต้องการการประสานงานดาวน์สตรีม
- ปิดใช้งาน Isd: ในบางแอปพลิเคชัน Isd ถูกตั้งค่าเป็น “OFF” และใช้เฉพาะ Ii เพื่อความเรียบง่าย
Ii (การป้องกันทันที): การป้องกันกระแสไฟผิดพร่องสูงทันที
Ii ให้การทริปทันที (โดยทั่วไป <50ms, บ่อยครั้ง <20ms) เมื่อกระแสไฟผิดพร่องสูงถึงระดับสูงมาก นี่คือแนวป้องกันสุดท้ายต่อความผิดพร่องร้ายแรงที่อาจทำให้เกิดการอาร์ค ไฟไหม้ หรือการทำลายอุปกรณ์.
วิธีการทำงานของ Ii
เมื่อกระแสไฟเกินเกณฑ์ Ii ชุดทริปจะส่งสัญญาณทริปไปยังกลไกเบรกเกอร์ทันทีโดยไม่มีการหน่วงเวลาโดยเจตนา การตอบสนองที่รวดเร็วนี้ช่วยลดพลังงานอาร์คและจำกัดความเสียหายระหว่างความผิดพร่องร้ายแรง เช่น การลัดวงจรแบบโบลต์.
การคำนวณ Ii
สูตรพื้นฐาน:
Ii ≥ 1.5 × Isd
เกณฑ์การคัดเลือก:
- การตั้งค่าขั้นต่ำ: ต้องสูงกว่า Isd อย่างน้อย 1.5 เท่าเพื่อหลีกเลี่ยงการทับซ้อนกัน
- การใช้งานกับมอเตอร์: ต้องเกินกระแสโรเตอร์ล็อค (โดยทั่วไป 8-12 × FLA)
- การประสานงาน: ต้องต่ำกว่า Isd ของเบรกเกอร์อัปสตรีมเพื่อรักษาการเลือกเฟ้น
- กระแสไฟฟ้าขัดข้องที่มีอยู่: ต้องต่ำกว่ากระแสลัดวงจรที่คาดการณ์ไว้ ณ จุดติดตั้ง
ตัวอย่าง:
สำหรับ Isd = 2,400A:
- Ii ขั้นต่ำ:
1.5 × 2,400A = 3,600A - Ii ทั่วไป:
12 × Ir = 12 × 400A = 4,800A(การตั้งค่าทั่วไป)
ข้อควรพิจารณาพิเศษสำหรับ Ii
- กระแสไหลเข้าของหม้อแปลง: Ii ต้องเกินกระแสไหลเข้าของการกระตุ้นแม่เหล็ก (โดยทั่วไป 8-12 เท่าของกระแสไฟฟ้าที่กำหนดสำหรับ 0.1 วินาที)
- การสตาร์ทมอเตอร์: สำหรับ การใช้งานการป้องกันมอเตอร์, Ii ต้องเกินกระแสโรเตอร์ล็อค
- การลด Arc Flash: การตั้งค่า Ii ที่ต่ำกว่า (เมื่ออนุญาต) จะช่วยลดพลังงานเหตุการณ์ arc flash
- การสะดุดสิ่งรบกวน: การตั้งค่า Ii ที่ต่ำเกินไปจะทำให้เกิดการทริปผิดพลาดระหว่างการสับสวิตช์ตามปกติ
การหน่วงเวลา: คำอธิบาย tr และ tsd
tr (การหน่วงเวลานาน)
การ tr พารามิเตอร์กำหนดลักษณะเวลาผกผันของการป้องกันเวลานาน ในชุดทริปอิเล็กทรอนิกส์ส่วนใหญ่ tr ไม่สามารถปรับได้โดยตรง แต่เป็นไปตามเส้นโค้ง I²t ที่ได้มาตรฐาน เส้นโค้งนี้ช่วยให้มั่นใจได้ว่าเวลาทริปจะลดลงเมื่อขนาดโอเวอร์โหลดเพิ่มขึ้น:
- ที่ 1.05 × Ir: ไม่มีการทริป (แถบความคลาดเคลื่อน)
- ที่ 1.2 × Ir: ทริปใน <2 ชั่วโมง (อิเล็กทรอนิกส์) หรือ <1 ชั่วโมง (ความร้อน-แม่เหล็ก)
- ที่ 6 × Ir: ทริปในไม่กี่วินาที (การเปลี่ยนไปสู่โซนเวลาสั้น)
ประเด็นสำคัญ: เส้นโค้ง tr ได้รับการปรับเทียบจากโรงงานเพื่อให้ตรงกับขีดจำกัดความร้อนของตัวนำตามมาตรฐาน IEC 60947-2 และ UL 489 โดยทั่วไปวิศวกรไม่ได้ปรับ tr โดยตรง แต่เลือกโดยการเลือกรุ่นชุดทริปที่เหมาะสม.
tsd (การหน่วงเวลาสั้น)
การ tsd พารามิเตอร์คือการหน่วงเวลาที่แน่นอนสำหรับการป้องกันเวลาสั้น การตั้งค่าทั่วไป ได้แก่ :
- 0.05 วินาที: การหน่วงเวลาขั้นต่ำสำหรับการประสานงานขั้นพื้นฐาน
- 0.1 วินาที: การตั้งค่ามาตรฐานสำหรับแอปพลิเคชันส่วนใหญ่
- 0.2 วินาที: การประสานงานที่ได้รับการปรับปรุงในระบบที่ซับซ้อน
- 0.4 วินาที: การหน่วงเวลาสูงสุดสำหรับการประสานงานเชิงลึก (ต้องใช้พิกัด Icw สูง)
กฎการประสานงาน: tsd อัปสตรีมควรนานกว่าเวลาเคลียร์ทั้งหมดของเบรกเกอร์ดาวน์สตรีมอย่างน้อย 0.1-0.2 วินาที เพื่อให้มั่นใจถึงการเลือกเฟ้น.
การป้องกัน I²t: หน่วยความจำความร้อนเพื่อการประสานงานที่ได้รับการปรับปรุง
ชุดทริปอิเล็กทรอนิกส์ขั้นสูงประกอบด้วย การป้องกัน I²t, ซึ่งคำนึงถึงผลกระทบความร้อนสะสมของการโอเวอร์โหลดหรือความผิดพร่องซ้ำๆ “หน่วยความจำความร้อน” นี้ป้องกันการทริปที่น่ารำคาญจากกระแสไฟกระชากสั้นๆ ที่ไม่เป็นอันตราย ในขณะที่ยังคงป้องกันความเค้นจากความร้อนอย่างต่อเนื่อง.
เมื่อใดควรเปิดใช้งาน I²t:
- วงจรไฟฟ้าของมอเตอร์ที่มีการสตาร์ทบ่อยครั้ง
- วงจรไฟฟ้าของหม้อแปลงที่มีกระแสไหลเข้าซ้ำๆ
- ระบบที่มีโหลดชั่วคราวสูง
- การประสานงานกับฟิวส์อัปสตรีม
เมื่อใดควรปิดใช้งาน I²t:
- การป้องกันเครื่องกำเนิดไฟฟ้า (ต้องมีการตอบสนองทันที)
- โหลดวิกฤตที่ยอมรับความล่าช้าไม่ได้
- ระบบเรเดียลแบบง่ายที่ไม่มีความต้องการการประสานงานที่ซับซ้อน
ตัวอย่างการตั้งค่าเชิงปฏิบัติโดยการใช้งาน
ตารางที่ 3: การตั้งค่า Trip Unit ทั่วไปโดยการใช้งาน
| โปรแกรม | กระแสโหลด (IL) | การตั้งค่า Ir | การตั้งค่า Isd | การตั้งค่า Ii | การตั้งค่า tsd | บันทึกย่อ |
|---|---|---|---|---|---|---|
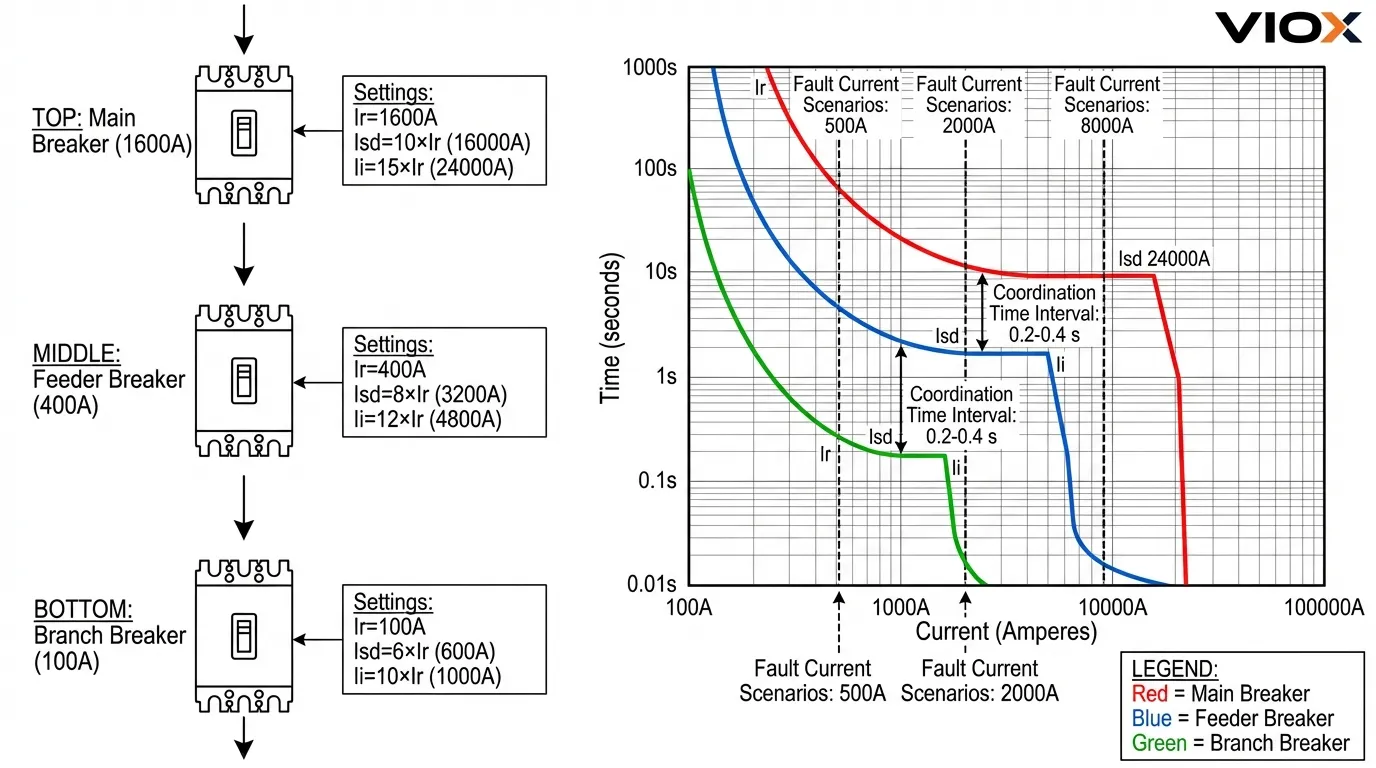
| เมนเบรกเกอร์ (1600A) | 1280A | 1.0 × In = 1600A | 10 × Ir = 16,000A | 15 × Ir = 24,000A | 0.4 วินาที | การเลือกเฟ้นสูงสุดกับฟีดเดอร์ |
| ฟีดเดอร์ (400A) | 320A | 0.8 × In = 320A | 6 × Ir = 1,920A | 12 × Ir = 3,840A | 0.2 วินาที | ประสานงานกับเมนและสาขา |
| สาขามอเตอร์ (100A) | 75A FLA | 0.9 × In = 90A | 8 × Ir = 720A | 12 × Ir = 1,080A | ปิด (Ii เท่านั้น) | รองรับ 6× LRA |
| แสงสว่าง/เต้ารับ (63A) | 50เอ | 0.8 × In = 50A | ปิด | 10 × Ir = 500A | ไม่มีข้อมูล | การป้องกันอย่างง่าย ไม่จำเป็นต้องมีการประสานงาน |
| หม้อแปลงไฟฟ้าด้านปฐมภูมิ (250A) | 200เอ | 0.8 × In = 200A | 10 × Ir = 2,000A | 12 × Ir = 2,400A | 0.1 วินาที | ทนต่อกระแสไหลเข้า 10 เท่า เป็นเวลา 0.1 วินาที |
| เครื่องกำเนิดไฟฟ้า (800A) | 640A | 0.8 × In = 640A | 3 × Ir = 1,920A | 6 × Ir = 3,840A | 0.05 วินาที | การเคลียร์อย่างรวดเร็วเพื่อป้องกันอัลเทอร์เนเตอร์ |
| เอาต์พุต UPS (160A) | 128A | 0.8 × In = 128A | ปิด | 8 × Ir = 1,024A | ไม่มีข้อมูล | ทันทีเท่านั้น ไม่มีความเสียหายต่อแบตเตอรี่ |
ตัวอย่างการคำนวณการตั้งค่าทีละขั้นตอน
ตารางที่ 4: ตัวอย่างการคำนวณการตั้งค่า
| สเต็ป | ตัวอย่างที่ 1: ฟีดเดอร์ 400A | ตัวอย่างที่ 2: สาขามอเตอร์ 100A | ตัวอย่างที่ 3: เมน 1600A |
|---|---|---|---|
| 1. กำหนดโหลด | โหลดต่อเนื่อง 320A | มอเตอร์ 75A (FLA), 450A LRA | โหลดรวม 1280A |
| 2. คำนวณ Ir | 320A ÷ 0.8 = 400A ตั้งค่า Ir = 1.0 × 400A = 400A |
75A ÷ 0.9 = 83A ปัดขึ้นเป็นเฟรม 100A ตั้งค่า Ir = 0.9 × 100A = 90A |
1280A ÷ 0.8 = 1600A ตั้งค่า Ir = 1.0 × 1600A = 1600A |
| 3. คำนวณ Isd | ต้องการการประสานงานกับวงจรย่อย 100A ตั้งค่า Isd = 6 × 400A = 2,400A |
การสตาร์ทมอเตอร์: 450A LRA ตั้งค่า Isd = 8 × 90A = 720A (เกิน 450A LRA) |
ประสานงานกับสายป้อน 400A ตั้งค่า Isd = 10 × 1600A = 16,000A |
| 4. คำนวณ Ii | ต้องเกิน Isd 1.5 เท่า ตั้งค่า Ii = 12 × 400A = 4,800A (2× Isd, ระยะห่างที่ดี) |
ต้องเกิน LRA ตั้งค่า Ii = 12 × 90A = 1,080A (2.4× LRA, เพียงพอ) |
ต้องเกิน Ii ของสายป้อน ตั้งค่า Ii = 15 × 1600A = 24,000A (5× Ii ของสายป้อน) |
| 5. ตั้งค่า Time Delays | tsd = 0.2s (อนุญาตให้วงจรย่อย 100A เคลียร์ภายใน 0.1s) |
tsd = OFF (ใช้ Ii เท่านั้นเพื่อความง่าย) |
tsd = 0.4s (การเลือกเฟ้นสูงสุด) |
| 6. ตรวจสอบการประสานงาน | ✓ Isd (2,400A) > Branch Ii (1,080A) ✓ tsd (0.2s) > เวลาเคลียร์ของวงจรย่อย |
✓ Ii (1,080A) < Feeder Isd (2,400A) ✓ ไม่จำเป็นต้องมีการประสานงานต้นทาง |
✓ Isd (16,000A) > Feeder Ii (4,800A) ✓ tsd (0.4s) > Feeder tsd + 0.2s |
การเลือกเฟ้นและการประสานงาน: ความสัมพันธ์ที่สำคัญ
การประสานงานที่เหมาะสมระหว่างอุปกรณ์ป้องกันต้นทางและปลายทางเป็นสิ่งจำเป็นเพื่อลดขอบเขตการหยุดทำงานระหว่างข้อผิดพลาด เป้าหมาย: เฉพาะเบรกเกอร์ที่อยู่ใกล้กับข้อผิดพลาดมากที่สุดเท่านั้นที่ควรทริป โดยปล่อยให้ส่วนที่เหลือของระบบมีพลังงาน.
ตารางที่ 5: กฎการประสานงานการเลือกเฟ้น
| ข้อกำหนดการประสานงาน | กฎ | ตัวอย่าง |
|---|---|---|
| Upstream Ir เทียบกับ Downstream Ir | Upstream Ir ≥ 2× Downstream Ir | Main 1600A, Feeder 400A (อัตราส่วน 4×) |
| Upstream Isd เทียบกับ Downstream Ii | Upstream Isd > Downstream Ii | Main Isd 16,000A > Feeder Ii 4,800A |
| Upstream tsd เทียบกับ Downstream Clearing Time | Upstream tsd ≥ Downstream total clearing + 0.1-0.2s | Main tsd 0.4s > Feeder (0.2s + 0.1s clearing) |
| Upstream Ii เทียบกับ Downstream Ii | Upstream Ii ≥ 2× Downstream Ii | Main Ii 24,000A > Feeder Ii 4,800A (อัตราส่วน 5×) |
| I²t Coordination | Upstream I²t > Downstream I²t | Main I²t ON, Feeder I²t ON หรือ OFF |
หลักการประสานงานที่สำคัญ: อุปกรณ์ต้นทางแต่ละเครื่องต้องมีการตั้งค่าพิกอัพที่สูงกว่าและค่าหน่วงเวลาที่นานกว่าอุปกรณ์ปลายทางที่ป้องกัน ซึ่งจะสร้าง “cascade” ของการป้องกันที่เบรกเกอร์ที่เล็กที่สุดจะทริปก่อน จากนั้นเบรกเกอร์ที่ใหญ่กว่าถัดไป และอื่นๆ.
Advanced Coordination: สำหรับระบบที่ซับซ้อน ให้ใช้ซอฟต์แวร์วิเคราะห์เส้นโค้งเวลา-กระแส (ผู้ผลิตหลายรายมีเครื่องมือฟรี) เพื่อตรวจสอบการประสานงานในทุกระดับกระแสไฟผิดพลาด ฝ่ายสนับสนุนด้านเทคนิคของ VIOX สามารถช่วยในการ การเลือกอุปกรณ์ป้องกันวงจร และการศึกษาการประสานงาน.
ข้อผิดพลาดในการตั้งค่าทั่วไปและวิธีแก้ไข
ตารางที่ 6: ข้อผิดพลาดในการตั้งค่าทั่วไปและวิธีแก้ไข
| ผิดพลาด | เกี่ย | แนวทางที่ถูกต้อง | Prevention |
|---|---|---|---|
| Ir ตั้งค่าสูงเกินไป | ความร้อนสูงเกินไปของตัวนำ ความเสียหายของฉนวน | คำนวณ Ir ตามความสามารถในการนำกระแสของตัวนำ ไม่ใช่ขนาดเฟรมของเบรกเกอร์ | ตรวจสอบเสมอว่า Ir ≤ ความสามารถในการนำกระแสของตัวนำ |
| Ir ตั้งค่าต่ำเกินไป | การสะดุดที่น่ารำคาญระหว่างการทำงานปกติ | พิจารณาโหลดต่อเนื่อง + ค่าเผื่อความปลอดภัย (กฎ 80%) | วัดกระแสโหลดจริงก่อนตั้งค่า |
| Isd = Ii (ไม่มีการแยก) | สูญเสียการเลือกเฟ้น, ฟังก์ชันทั้งสองทริปพร้อมกัน | ตรวจสอบให้แน่ใจว่า Ii ≥ 1.5 × Isd | ใช้อัตราส่วนที่ผู้ผลิตแนะนำ |
| tsd สั้นเกินไป | เซอร์กิตเบรกเกอร์ต้นทางทริปก่อนที่ปลายทางจะเคลียร์ข้อผิดพลาด | เพิ่มค่าเผื่อ 0.1-0.2 วินาทีให้กับเวลาเคลียร์ปลายทาง | คำนวณเวลารวมในการเคลียร์รวมถึงเวลาอาร์ค |
| tsd ยาวเกินไป | ระยะเวลาของกระแสไฟฟ้าผิดพลาดมากเกินไป, อุปกรณ์เสียหาย | ปรับสมดุลความต้องการในการประสานงานกับพิกัดความทนทานของอุปกรณ์ | ตรวจสอบว่าพิกัด Icw ของเบรกเกอร์รองรับระยะเวลา tsd |
| Ii ตั้งค่าต่ำกว่า LRA ของมอเตอร์ | เบรกเกอร์ทริปเมื่อมอเตอร์สตาร์ท | ตั้งค่า Ii ≥ 1.2 × กระแสโรเตอร์ล็อค | รับข้อมูลแผ่นป้ายมอเตอร์ก่อนตั้งค่า |
| ละเลย I²t | การทริปก่อนเวลาอันควรจากทรานเซียนท์ที่ไม่เป็นอันตราย | เปิดใช้งาน I²t สำหรับโหลดที่มีกระแสไหลเข้าบ่อย | ทำความเข้าใจลักษณะโหลด |
| ไม่มีการศึกษาการประสานงาน | รูปแบบการทริปแบบสุ่ม, ไฟดับขนาดใหญ่ | ทำการวิเคราะห์เส้นโค้งเวลา-กระแส | ใช้ซอฟต์แวร์การประสานงานหรือปรึกษาผู้ผลิต |
| ลืมอุณหภูมิแวดล้อม | หน่วยความร้อน-แม่เหล็กทริปเร็วในสภาพแวดล้อมที่ร้อน | ใช้ปัจจัยลดพิกัดหรือใช้หน่วยทริปอิเล็กทรอนิกส์ | วัดอุณหภูมิภายในแผงควบคุมจริง |
Pro Tip: จัดทำเอกสารการตั้งค่าหน่วยทริปทั้งหมดบนแผนผังแผงควบคุมและบำรุงรักษาฐานข้อมูลการตั้งค่า หน่วยทริปอิเล็กทรอนิกส์จำนวนมากอนุญาตให้ตั้งค่าอัปโหลด/ดาวน์โหลดผ่านซอฟต์แวร์ ทำให้การทดสอบเดินเครื่องและการแก้ไขปัญหาง่ายขึ้นมาก.
การแก้ไขปัญหาหน่วยทริป
- อาการ: การทริปรบกวนบ่อยครั้ง
- ตรวจสอบว่า Ir ตั้งค่าต่ำเกินไปสำหรับโหลดจริงหรือไม่
- ตรวจสอบว่า Ii ไม่ต่ำกว่ากระแสเริ่มต้นของมอเตอร์หรือกระแสไหลเข้าของหม้อแปลง
- ยืนยันว่าอุณหภูมิแวดล้อมอยู่ในพิกัดเบรกเกอร์
- ตรวจสอบการเชื่อมต่อที่หลวมซึ่งทำให้แรงดันไฟฟ้าตกและกระแสไฟกระชาก
- อาการ: เบรกเกอร์ไม่ทริปเมื่อโอเวอร์โหลด
- ตรวจสอบว่าการตั้งค่า Ir ตรงกับข้อกำหนดของโหลด
- ตรวจสอบว่าหน่วยความร้อน-แม่เหล็กมีการชดเชยอุณหภูมิ
- ทดสอบฟังก์ชันการทำงานของหน่วยทริปตามขั้นตอนของผู้ผลิต
- ยืนยันว่าเบรกเกอร์ยังไม่ถึงจุดสิ้นสุดของอายุการใช้งานทางไฟฟ้า
- อาการ: สูญเสียการเลือกเฟ้น (เบรกเกอร์ผิดตัวทริป)
- ตรวจสอบการศึกษาการประสานงาน—Isd ต้นทางอาจต่ำเกินไป
- ตรวจสอบว่าการตั้งค่า tsd ให้ค่าเผื่อเวลาที่เพียงพอ
- ตรวจสอบว่า Ii ของเบรกเกอร์ปลายทางเกิน Isd ต้นทาง
- ยืนยันว่าระดับกระแสไฟฟ้าผิดพลาดตรงกับสมมติฐานการออกแบบ
- อาการ: ไม่สามารถตั้งค่า Ir ที่ต้องการได้
- ตรวจสอบว่าปลั๊กพิกัด (ถ้ามี) จำกัดช่วงการปรับ
- ตรวจสอบว่ารุ่นหน่วยทริปรองรับช่วง Ir ที่ต้องการ
- พิจารณาเปลี่ยนเป็นขนาดเฟรมหรือรุ่นหน่วยทริปที่แตกต่างกัน
สำหรับปัญหาที่เกิดขึ้นต่อเนื่อง ฝ่ายสนับสนุนด้านเทคนิคของ VIOX สามารถให้การวินิจฉัยจากระยะไกลสำหรับหน่วยทริปอิเล็กทรอนิกส์ที่มีความสามารถในการสื่อสาร หรือแนะนำคุณเกี่ยวกับขั้นตอนการทดสอบอย่างเป็นระบบ.
การบูรณาการกับระบบสมัยใหม่
หน่วยทริปอิเล็กทรอนิกส์ VIOX ขั้นสูงมีคุณสมบัติที่เหนือกว่าการป้องกัน LSI ขั้นพื้นฐาน:
- โปรโตคอลการสื่อสาร: Modbus RTU, Profibus, Ethernet สำหรับการบูรณาการกับ SCADA/BMS
- การบันทึกเหตุการณ์: บันทึกเหตุการณ์การทริป, โปรไฟล์โหลด และสภาวะการเตือน
- การบำรุงรักษาเชิงคาดการณ์: ตรวจสอบการสึกหรอของหน้าสัมผัส, จำนวนการทำงาน และความเค้นทางความร้อน
- การตั้งค่าจากระยะไกล: ปรับพารามิเตอร์ผ่านซอฟต์แวร์โดยไม่ต้องเปิดแผงควบคุม
- การป้องกันไฟฟ้ารั่ว: การตั้งค่า Ig แบบบูรณาการเพื่อการปกป้องบุคลากรและอุปกรณ์
- การลด Arc Flash: โหมดการบำรุงรักษาลด Ii ชั่วคราวเพื่อลดพลังงานเหตุการณ์
คุณสมบัติเหล่านี้มีค่าอย่างยิ่งใน การชาร์จ EV เชิงพาณิชย์, ศูนย์ข้อมูล และโครงสร้างพื้นฐานที่สำคัญ ซึ่งค่าใช้จ่ายในการหยุดทำงานสูง และการบำรุงรักษาเชิงรุกเป็นสิ่งจำเป็น.
คำถามที่พบบ่อย: การตั้งค่า Trip Unit ของ MCCB
ถาม: Ir หมายถึงอะไรบน Trip Unit ของ MCCB
ตอบ: Ir ย่อมาจาก “กระแสพิกอัพระยะยาว” หรือ “การตั้งค่ากระแสที่กำหนด” แสดงถึงกระแสต่อเนื่องที่เบรกเกอร์จะสามารถจ่ายได้โดยไม่ทริป และโดยทั่วไปสามารถปรับได้ตั้งแต่ 0.4 ถึง 1.0 เท่าของพิกัดกระแสที่กำหนดของเบรกเกอร์ (In) ตัวอย่างเช่น หากคุณมีเบรกเกอร์ขนาด 400A (In = 400A) และตั้งค่า Ir เป็น 0.8 พิกัดกระแสต่อเนื่องที่มีผลบังคับใช้จะกลายเป็น 320A Ir ป้องกันการโอเวอร์โหลดอย่างต่อเนื่องโดยใช้ลักษณะผกผันตามเวลา ยิ่งโอเวอร์โหลดสูงเท่าใด การทริปก็จะยิ่งเร็วขึ้น.
ถาม: ฉันจะคำนวณการตั้งค่า Ir ที่ถูกต้องสำหรับโหลดของฉันได้อย่างไร
ตอบ: ใช้สูตร: Ir = กระแสโหลด ÷ 0.8 (สำหรับโหลดต่อเนื่องตามกฎ NEC/IEC 80%) ตัวอย่างเช่น โหลดต่อเนื่อง 100A ต้องใช้ Ir = 100A ÷ 0.8 = 125A หากเบรกเกอร์ของคุณมี In = 160A ให้ตั้งค่าหน้าปัด Ir เป็น 125A ÷ 160A = 0.78 (ปัดเป็น 0.8 หากเป็นการตั้งค่าที่ใกล้เคียงที่สุด) ตรวจสอบเสมอว่า Ir ไม่เกินค่ากระแสของตัวนำที่เล็กที่สุดในวงจร และคำนึงถึง การลดพิกัดตามอุณหภูมิแวดล้อม หากจำเป็น.
ถาม: อะไรคือความแตกต่างระหว่าง Isd และ Ii
ก: Isd (Short-Time Pickup) และ Ii (Instantaneous Pickup) ทั้งสองอย่างป้องกันไฟฟ้าลัดวงจร แต่มีเวลาตอบสนองที่แตกต่างกัน Isd มีการหน่วงเวลาโดยเจตนา (tsd โดยทั่วไปคือ 0.05-0.4 วินาที) เพื่อให้เบรกเกอร์ดาวน์สตรีมสามารถเคลียร์ข้อผิดพลาดก่อน ทำให้สามารถเลือกสรรได้ Ii ให้การทริปทันที (<50ms) โดยไม่มีการหน่วงเวลาสำหรับข้อผิดพลาดร้ายแรง คิดว่า Isd เป็น “การป้องกันแบบประสานงาน” และ Ii เป็น “การป้องกันทางเลือกสุดท้าย” ในระบบที่ประสานงานอย่างเหมาะสม Ii ควรตั้งค่าให้สูงกว่า Isd อย่างน้อย 1.5 เท่าเพื่อหลีกเลี่ยงการทับซ้อนกัน.
ถาม: ทำไมฉันต้องมีการหน่วงเวลา Short-Time (tsd) แทนที่จะเป็นการทริปทันที
ตอบ: การหน่วงเวลา Short-Time ช่วยให้ การเลือก—ความสามารถในการแยกเฉพาะวงจรที่มีข้อผิดพลาด ในขณะที่ยังคงจ่ายไฟให้กับส่วนที่เหลือของระบบ หากไม่มี tsd ข้อผิดพลาดที่ใดก็ได้ในระบบอาจทำให้เบรกเกอร์หลักทริป ทำให้เกิดไฟดับทั้งหมด การเพิ่มการหน่วงเวลา 0.1-0.4 วินาทีให้กับเบรกเกอร์อัปสตรีม จะทำให้เบรกเกอร์ดาวน์สตรีมมีเวลาเคลียร์ข้อผิดพลาดก่อน สิ่งนี้ช่วยลดขอบเขตการหยุดทำงานและปรับปรุงความน่าเชื่อถือของระบบ อย่างไรก็ตาม tsd กำหนดให้เบรกเกอร์สามารถทนต่อกระแสไฟฟ้าลัดวงจรได้ในช่วงเวลาหน่วง (ตรวจสอบพิกัด Icw).
ถาม: ฉันสามารถตั้งค่า Ii ให้ต่ำกว่า Isd ได้หรือไม่
ตอบ: ไม่ นี่เป็นข้อผิดพลาดทั่วไปที่ทำให้วัตถุประสงค์ของการมีโซนการป้องกันแยกกันสองโซนหมดไป. Ii ต้องสูงกว่า Isd เสมอ (โดยทั่วไปสูงกว่า 1.5-2 เท่า) เพื่อรักษาการประสานงานที่เหมาะสม หาก Ii ≤ Isd ฟังก์ชันทั้งสองจะเปิดใช้งานพร้อมกันระหว่างเกิดข้อผิดพลาด ซึ่งจะขจัดการป้องกัน Short-Time ที่หน่วงเวลาไว้ Trip Unit ที่ทันสมัยส่วนใหญ่ป้องกันข้อผิดพลาดนี้โดยการปรับ Ii โดยอัตโนมัติ หากคุณพยายามตั้งค่าให้ต่ำกว่า Isd แต่ให้ตรวจสอบการตั้งค่าของคุณเสมอหลังจากการปรับ.
ถาม: การป้องกัน I²t คืออะไร และฉันควรใช้เมื่อใด
ก: การป้องกัน I²t (เรียกอีกอย่างว่า “Thermal Memory”) คำนึงถึงผลกระทบความร้อนสะสมของกระแสไฟฟ้าเมื่อเวลาผ่านไป ป้องกันการทริปที่ไม่พึงประสงค์จากกระแสไฟกระชากช่วงสั้นๆ ที่ไม่เป็นอันตราย (การสตาร์ทมอเตอร์, กระแสไหลเข้าของหม้อแปลง) ในขณะที่ยังคงป้องกันความเค้นจากความร้อนอย่างต่อเนื่อง เปิดใช้งาน I²t สำหรับ: วงจรมอเตอร์ที่มีการสตาร์ทบ่อย, ขดลวดปฐมภูมิของหม้อแปลง หรือโหลดใดๆ ที่มีกระแสไหลเข้าสูงซ้ำๆ ปิดใช้งาน I²t สำหรับ: การป้องกันเครื่องกำเนิดไฟฟ้า (ซึ่งการตอบสนองทันทีเป็นสิ่งสำคัญ), ระบบ Radial อย่างง่าย หรือแอปพลิเคชันที่ไม่สามารถยอมรับความล่าช้าใดๆ ได้ I²t มีประโยชน์อย่างยิ่งสำหรับการบรรลุการประสานงานกับฟิวส์อัปสตรีม.
ถาม: ฉันจะประสานการตั้งค่า Trip ระหว่างเบรกเกอร์อัปสตรีมและดาวน์สตรีมได้อย่างไร
ตอบ: ทำตามกฎเหล่านี้: (1) Upstream Ir ≥ 2× Downstream Ir เพื่อรองรับโหลดรวม Upstream Isd > Downstream Ii เพื่อให้การป้องกัน Instantaneous ของเบรกเกอร์ดาวน์สตรีมไม่ทับซ้อนกับการป้องกัน Short-Time ของอัปสตรีม Tsd อัปสตรีม ≥ เวลาเคลียร์ทั้งหมดของดาวน์สตรีม + ระยะขอบ 0.1-0.2 วินาที เพื่อให้แน่ใจว่าเบรกเกอร์ดาวน์สตรีมเคลียร์ก่อน (4) Upstream Ii ≥ 2× Downstream Ii สำหรับการสำรองข้อมูลขั้นสุดท้าย ใช้ซอฟต์แวร์วิเคราะห์เส้นโค้งเวลา-กระแสเพื่อตรวจสอบการประสานงานในทุกระดับข้อผิดพลาด VIOX ให้ความช่วยเหลือด้านการประสานงานฟรี ติดต่อทีมเทคนิคของเราพร้อมแผนภาพ One-Line ของระบบของคุณ.
สิ่งสำคัญที่ต้องจดจำ
- Ir (การป้องกันระยะยาว) กำหนดพิกัดกระแสต่อเนื่องและต้องคำนวณตามกระแสโหลดจริงหารด้วย 0.8 (กฎการโหลด 80%) โดยไม่เกินค่ากระแสของตัวนำ.
- Isd (Short-Time Pickup) เปิดใช้งานการเลือกสรรโดยการเพิ่มการหน่วงเวลาโดยเจตนาก่อนที่จะทริป ทำให้เบรกเกอร์ดาวน์สตรีมสามารถเคลียร์ข้อผิดพลาดก่อน ซึ่งจำเป็นอย่างยิ่งสำหรับการลดขอบเขตการหยุดทำงานในระบบที่ประสานงาน.
- Ii (Instantaneous Protection) ให้การทริปทันทีสำหรับข้อผิดพลาดร้ายแรง และต้องตั้งค่าให้สูงกว่า Isd อย่างน้อย 1.5 เท่าเพื่อรักษาระยะห่างที่เหมาะสมระหว่างโซนการป้องกัน.
- หน่วยเดินทางอิเล็กทรอนิกส์ มีความยืดหยุ่นและความแม่นยำมากกว่ายูนิต Thermal-Magnetic มาก โดยมีช่วง Ir (0.4-1.0 × In), Isd (1.5-10 × Ir) และ Ii (2-15 × Ir) ที่ปรับได้ พร้อมคุณสมบัติขั้นสูง เช่น การป้องกัน I²t และการสื่อสาร.
- การประสานงานต้องมีการวางแผนอย่างเป็นระบบ: เบรกเกอร์อัปสตรีมต้องมีการตั้งค่าพิกอัพที่สูงกว่าและการหน่วงเวลาที่นานกว่าอุปกรณ์ดาวน์สตรีม โดยทำตามกฎ Isd อัปสตรีม > Ii ดาวน์สตรีม และ Tsd อัปสตรีม ≥ เวลาเคลียร์ดาวน์สตรีม + ระยะขอบ.
- การป้องกัน I²t (Thermal Memory) ป้องกันการทริปที่ไม่พึงประสงค์จากกระแสไหลเข้าช่วงสั้นๆ ในขณะที่ยังคงป้องกันการโอเวอร์โหลดอย่างต่อเนื่อง เปิดใช้งานสำหรับแอปพลิเคชันมอเตอร์และหม้อแปลง ปิดใช้งานสำหรับเครื่องกำเนิดไฟฟ้าและระบบอย่างง่าย.
- ข้อผิดพลาดทั่วไป ได้แก่ การตั้งค่า Ir สูงเกินไป (เสี่ยงต่อความเสียหายของตัวนำ), การตั้งค่า Ii ≤ Isd (สูญเสียการเลือกสรร) และการละเลยกระแสสตาร์ทมอเตอร์ (ทำให้เกิดการทริปที่ไม่พึงประสงค์) ตรวจสอบการตั้งค่ากับลักษณะโหลดและข้อกำหนดการประสานงานเสมอ.
- การวิเคราะห์เส้นโค้งเวลา-กระแส เป็นสิ่งจำเป็นสำหรับระบบที่ซับซ้อน ใช้ซอฟต์แวร์ที่ผู้ผลิตจัดหาให้ หรือปรึกษาฝ่ายสนับสนุนด้านเทคนิคของ VIOX เพื่อตรวจสอบการประสานงานในทุกระดับกระแสไฟฟ้าลัดวงจร และให้แน่ใจว่ามีการเลือกสรรที่เหมาะสม.
- เอกสารและการทดสอบ มีความสำคัญอย่างยิ่ง: บันทึกการตั้งค่า Trip Unit ทั้งหมดในแผนผังแผง ควบคุม ดำเนินการทดสอบการว่าจ้างเพื่อตรวจสอบการทำงาน และบำรุงรักษาฐานข้อมูลการตั้งค่าสำหรับการแก้ไขปัญหาและการปรับเปลี่ยนในอนาคต.
สำหรับการป้องกันวงจรที่เชื่อถือได้และกำหนดค่าอย่างแม่นยำ สำรวจผลิตภัณฑ์ทั้งหมดของ VIOX MCCB พร้อม Trip Unit อิเล็กทรอนิกส์ขั้นสูง. ทีมวิศวกรของเราให้การสนับสนุนอย่างครอบคลุมสำหรับการเลือก Trip Unit การศึกษาการประสานงาน และความช่วยเหลือในการว่าจ้าง เพื่อให้มั่นใจว่าระบบจำหน่ายไฟฟ้าของคุณทำงานได้อย่างปลอดภัยและมีประสิทธิภาพ ติดต่อเราเพื่อขอคำแนะนำเฉพาะแอปพลิเคชันเกี่ยวกับการเพิ่มประสิทธิภาพการตั้งค่า Ir, Isd และ Ii สำหรับข้อกำหนดเฉพาะของคุณ.
