
Pulse counters ແມ່ນອຸປະກອນອະເນກປະສົງທີ່ອອກແບບມາເພື່ອນັບການເພີ່ມຂຶ້ນ ແລະ/ຫຼືຫຼຸດລົງຂອງສັນຍານຂາເຂົ້າ, ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນຄໍາຮ້ອງສະຫມັກເຊັ່ນ: ການຕິດຕາມພະລັງງານ, ການວັດແທກການໄຫຼ, ແລະເຊັນເຊີ interfacing. ເຄື່ອງມືທີ່ສາມາດກໍານົດໄດ້ເຫຼົ່ານີ້ສະເຫນີຄວາມສາມາດໃນການນັບກໍາມະຈອນທີ່ຊັດເຈນ, ການກັ່ນຕອງສັນຍານ, ແລະການລົບກວນຜົນກະທົບຕໍ່, ເຮັດໃຫ້ມັນເປັນສິ່ງຈໍາເປັນສໍາລັບການເກັບຂໍ້ມູນທີ່ຖືກຕ້ອງແລະການວິເຄາະໃນຄໍາຮ້ອງສະຫມັກອຸດສາຫະກໍາແລະຜູ້ບໍລິໂພກຕ່າງໆ.

ການທໍາງານຂອງ Pulse Counter
ເຄົາເຕີ Pulse ຖືກອອກແບບມາດ້ວຍເຄື່ອງນັບເຊັນ 16-bit ທີ່ສາມາດຕັ້ງຄ່າການເພີ່ມຂຶ້ນຫຼືຫຼຸດລົງໂດຍອີງໃສ່ຄຸນລັກສະນະຂອງສັນຍານເຂົ້າ. ອຸປະກອນເຫຼົ່ານີ້ສະຫນອງການທໍາງານທີ່ສໍາຄັນເຊັ່ນ:
- ການກວດຈັບຂອບທີ່ຖືກຕ້ອງສໍາລັບທັງສັນຍານທີ່ເພີ່ມຂຶ້ນແລະຫຼຸດລົງ.
- ການກັ່ນຕອງສັນຍານທາງເລືອກເພື່ອລົບລ້າງ glitches ທີ່ບໍ່ຕ້ອງການ.
- ຂັດຂວາງການກະຕຸ້ນເມື່ອເງື່ອນໄຂທີ່ກໍານົດໄວ້ລ່ວງຫນ້າແມ່ນບັນລຸໄດ້, ເຊັ່ນວ່າເຖິງມູນຄ່າການນັບສະເພາະ.
- ຫນ່ວຍນັບເອກະລາດຫຼາຍ, ແຕ່ລະຄົນມີສອງຊ່ອງ (ຕົວຢ່າງ, ESP-IDF ສະຫນອງແປດຫນ່ວຍດັ່ງກ່າວ).
- ຄວາມສາມາດໃນການໂຕ້ຕອບກັບແຫຼ່ງຂໍ້ມູນຕ່າງໆ, ລວມທັງ pins ດິຈິຕອນແລະຜົນຜະລິດພິເສດເຊັ່ນ COMPA.
ການຕັ້ງຄ່າພື້ນຖານ ແລະຂັ້ນສູງ
ເພື່ອຕັ້ງຄ່າຕົວນັບກໍາມະຈອນ, ຕົວກໍານົດການທີ່ສໍາຄັນຈໍານວນຫນຶ່ງຕ້ອງໄດ້ຮັບການລະບຸ:
- ຕົວເລກຫົວໜ່ວຍ ແລະຊ່ອງທາງສຳລັບລະບົບຫຼາຍໜ່ວຍ.
- ການມອບໝາຍ GPIO ສຳລັບການປ້ອນຂໍ້ມູນກໍາມະຈອນ ແລະສັນຍານຄວບຄຸມ (ສາມາດຖືກປິດການນຳໃຊ້ດ້ວຍ PCNT_PIN_NOT_USED).
- ໂຫມດການນັບເພື່ອກໍານົດປະຕິກິລິຍາຕໍ່ກັບຂອບຂອງສັນຍານແລະການຄວບຄຸມວັດສະດຸປ້ອນ.
ການຕັ້ງຄ່າຂັ້ນສູງອາດຈະປະກອບມີປັດໄຈການປັບຂະຫນາດ (ຕົວຢ່າງ, kWh ຕໍ່ກໍາມະຈອນ), ການຕັ້ງຄ່າຄວາມຖີ່ຂອງກໍາມະຈອນສູງສຸດສໍາລັບການກັ່ນຕອງສຽງ, ແລະໄລຍະຕິດຕາມກວດກາສະເພາະສໍາລັບການວັດແທກພະລັງງານຫຼືປະລິມານ. ບາງລະບົບ, ເຊັ່ນດຽວກັບ Niagara, ອະນຸຍາດໃຫ້ມີການປ່ຽນແປງແບບເຄື່ອນໄຫວເພື່ອປ້ອນ pins ໂດຍບໍ່ມີການຢຸດ counter, ສະຫນອງຄວາມຍືດຫຍຸ່ນໃນການດໍາເນີນງານ.
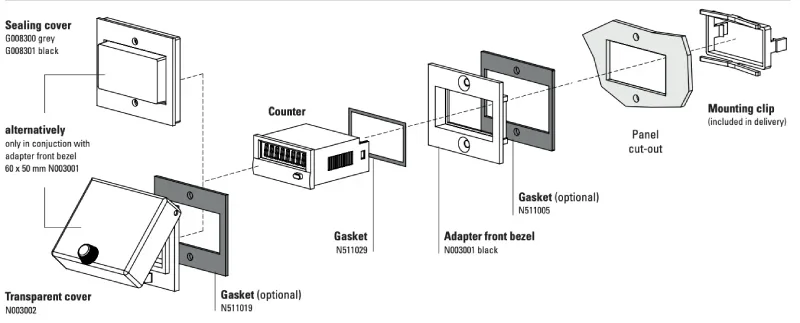
Pulse Counter Structure
ປະຕິບັດການ Pulse Counters
ປະຕິບັດການເຄື່ອງນັບການເຕັ້ນຂອງກໍາມະຈອນຢ່າງມີປະສິດທິພາບຮຽກຮ້ອງໃຫ້ມີຄວາມເຂົ້າໃຈລັກສະນະທີ່ສໍາຄັນຂອງເຂົາເຈົ້າແລະກໍານົດໃຫ້ເຂົາເຈົ້າເຫມາະສົມສໍາລັບຄໍາຮ້ອງສະຫມັກສະເພາະ. ເມື່ອເຮັດວຽກກັບເຄື່ອງນັບກໍາມະຈອນ, ມັນເປັນສິ່ງຈໍາເປັນທີ່ຈະຕ້ອງພິຈາລະນາລັກສະນະການດໍາເນີນງານຕໍ່ໄປນີ້:
ການປັບສະພາບສັນຍານ
ເຄື່ອງນັບກໍາມະຈອນຈໍານວນຫຼາຍລວມເອົາຄຸນສົມບັດການປັບສັນຍານເພື່ອເພີ່ມຄວາມຖືກຕ້ອງແລະຄວາມຫນ້າເຊື່ອຖື. ນີ້ອາດຈະປະກອບມີຕົວກອງ debounce ເພື່ອລົບລ້າງການນັບທີ່ບໍ່ຖືກຕ້ອງຈາກການ bounces ສະຫຼັບກົນຈັກຫຼືວົງຈອນການປະຕິເສດສິ່ງລົບກວນເພື່ອປັບປຸງປະສິດທິພາບໃນສະພາບແວດລ້ອມທີ່ມີສຽງໄຟຟ້າ. ສໍາລັບຕົວຢ່າງ, ໂມດູນຕ້ານກໍາມະຈອນ ESP-IDF ອະນຸຍາດໃຫ້ຜູ້ໃຊ້ສາມາດກໍານົດຕົວກໍານົດການກັ່ນຕອງ glitch ທີ່ຈະບໍ່ສົນໃຈ pulses ສັ້ນຕ່ໍາກວ່າໄລຍະເວລາທີ່ກໍານົດໄວ້.
ໂຫມດນັບ
ເຄົາເຕີ Pulse ໂດຍປົກກະຕິສະເຫນີຮູບແບບການນັບຕ່າງໆເພື່ອໃຫ້ເຫມາະສົມກັບຄໍາຮ້ອງສະຫມັກທີ່ແຕກຕ່າງກັນ. ໂໝດທົ່ວໄປລວມມີ:
- ການນັບຂຶ້ນ: ການເພີ່ມຕົວນັບໃນແຕ່ລະກຳມະຈອນ.
- ການນັບຖອຍຫຼັງ: ຫຼຸດຕົວນັບລົງໃນແຕ່ລະກຳມະຈອນ.
- ການນັບຂຶ້ນ/ລົງ: ການປ່ຽນທິດທາງການນັບໂດຍອີງໃສ່ສັນຍານຄວບຄຸມ ຫຼື ຄຸນລັກສະນະຂອງກຳມະຈອນ.
ຂີດຈຳກັດ ແລະ ການຈັດການຂີດຈຳກັດ
ເຄື່ອງນັບການເຕັ້ນຂອງກໍາມະຈອນແບບພິເສດຫຼາຍອັນອະນຸຍາດໃຫ້ຜູ້ໃຊ້ສາມາດກໍານົດຂອບເຂດຫຼືຂອບເຂດຈໍາກັດທີ່ເຮັດໃຫ້ເກີດການປະຕິບັດສະເພາະເມື່ອເຖິງ. ນີ້ສາມາດປະກອບມີ:
- ການສ້າງການຂັດຂວາງເມື່ອການນັບເຖິງມູນຄ່າທີ່ກໍານົດໄວ້ກ່ອນ.
- ຣີເຊັດຕົວນັບອັດຕະໂນມັດເມື່ອມັນຮອດຂີດຈຳກັດສູງສຸດ ຫຼື ຕ່ຳສຸດ.
- ກະຕຸ້ນເຫດການພາຍນອກ ຫຼືໂມງປຸກໂດຍອີງຕາມເກນການນັບ.
ການດຶງຂໍ້ມູນແລະການປະມວນຜົນ
ການດຶງຂໍ້ມູນການນັບແລະການປຸງແຕ່ງມັນສໍາລັບຄວາມເຂົ້າໃຈທີ່ມີຄວາມຫມາຍແມ່ນເປັນລັກສະນະທີ່ສໍາຄັນຂອງເຄື່ອງນັບການເຕັ້ນຂອງກໍາມະຈອນ. ນີ້ອາດຈະປະກອບມີ:
- ການສຳຫຼວດແຕ່ລະໄລຍະຂອງມູນຄ່ານັບ.
- ການນໍາໃຊ້ວິທີການທີ່ຂັດຂວາງສໍາລັບການອັບເດດໃນເວລາຈິງ.
- ການນຳໃຊ້ປັດໄຈການປັບຂະໜາດເພື່ອປ່ຽນການນັບດິບເປັນຫົວໜ່ວຍທີ່ມີຄວາມໝາຍ (ເຊັ່ນ: ກິໂລວັດໂມງ, ລິດ, ແລະອື່ນໆ).
ການປະສົມປະສານກັບລະບົບການຄວບຄຸມ
ເຄື່ອງນັບກຳມະຈອນມັກຈະມີການໂຕ້ຕອບກັບລະບົບການຄວບຄຸມ ຫຼືການຕິດຕາມທີ່ໃຫຍ່ກວ່າ. ການປະສົມປະສານນີ້ອາດຈະປະກອບມີ:
- ການສື່ສານຂໍ້ມູນການນັບຫຼາຍກວ່າໂປຣໂຕຄໍມາດຕະຖານເຊັ່ນ Modbus ຫຼື BACnet.
- ການສະຫນອງຜົນໄດ້ຮັບດິຈິຕອນທີ່ມີການປ່ຽນແປງສະຖານະໂດຍອີງໃສ່ມູນຄ່າການນັບ.
- ສະເໜີໃຫ້ຜົນຜະລິດອະນາລັອກຕາມອັດຕາສ່ວນກັບຈຳນວນ ຫຼືອັດຕາຂອງກຳມະຈອນທີ່ເຂົ້າມາ.
Calibration ແລະບໍາລຸງຮັກສາ
ການປັບທຽບແລະການບໍາລຸງຮັກສາເປັນປົກກະຕິເປັນສິ່ງຈໍາເປັນສໍາລັບການຮັບປະກັນຄວາມຖືກຕ້ອງຢ່າງຕໍ່ເນື່ອງຂອງເຄື່ອງນັບກໍາມະຈອນ, ໂດຍສະເພາະໃນຄໍາຮ້ອງສະຫມັກການວັດແທກທີ່ສໍາຄັນ. ນີ້ອາດຈະປະກອບມີ:
- ການກວດສອບແຕ່ລະໄລຍະຂອງຄວາມຖືກຕ້ອງຂອງການນັບໂດຍໃຊ້ສັນຍານ input ທີ່ຮູ້ຈັກ.
- ການກວດສອບແລະປັບການຕັ້ງຄ່າຄວາມອ່ອນໄຫວຂອງວັດສະດຸປ້ອນເພື່ອບັນຊີການປ່ຽນແປງຄວາມແຮງຂອງສັນຍານໃນໄລຍະເວລາ.
- ການເຮັດຄວາມສະອາດຫຼືປ່ຽນອົງປະກອບກົນຈັກໃນລະບົບໂດຍໃຊ້ການຕິດຕໍ່ທາງດ້ານຮ່າງກາຍເພື່ອກວດຫາກໍາມະຈອນ.
Pulse Counter Wiring
ແຜນວາດການສາຍເຄົາເຕີຂອງ Pulse ແຕກຕ່າງກັນໄປຕາມອຸປະກອນສະເພາະ ແລະແອັບພລິເຄຊັນ, ແຕ່ໂດຍທົ່ວໄປແລ້ວປະຕິບັດຕາມໂຄງສ້າງທົ່ວໄປ. ສໍາລັບເຄື່ອງນັບກໍາມະຈອນດິຈິຕອນສ່ວນໃຫຍ່, ສາຍໄຟພື້ນຖານປະກອບມີ:
- ການເຊື່ອມຕໍ່ການສະຫນອງພະລັງງານ (ໂດຍປົກກະຕິແຮງດັນໄຟຟ້າ DC).
- ສະຖານີປ້ອນສັນຍານເພື່ອກວດຫາກຳມະຈອນ.
- ຣີເຊັດການປ້ອນຂໍ້ມູນສຳລັບການຣີເຊັດຕົວນັບດ້ວຍມື ຫຼືໄຟຟ້າ.
- ການເຊື່ອມຕໍ່ພື້ນດິນ.
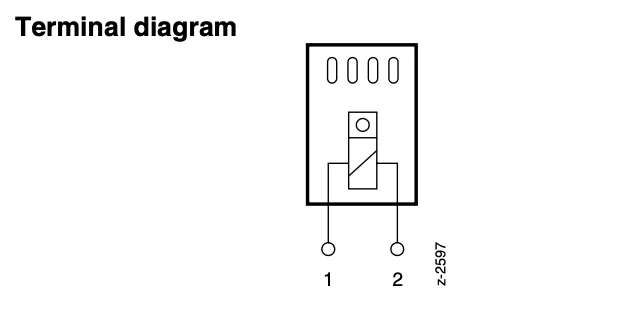
ແຜນວາດສາຍໄຟແບບປົກກະຕິສຳລັບເຄື່ອງນັບກຳມະຈອນດິຈິຕອລອາດມີລັກສະນະດັ່ງນີ້:
- Terminal 1: DC “-” (GND) ຫຼື AC.
- Terminal 2: Pulse counter input.
- Terminal 3: ຣີເຊັດ.
- Terminal 4: DC “+” ຫຼື AC.
ສໍາລັບເຄົາເຕີຊັ້ນສູງຫຼືຜູ້ທີ່ມີຄຸນສົມບັດເພີ່ມເຕີມ, ສາຍໄຟອາດຈະປະກອບມີ:
- ການສະຫນອງພະລັງງານ Backlight (ມັກຈະເປັນທາງເລືອກ).
- terminals ອອກສໍາລັບ relay ຫຼືສັນຍານໄຟຟ້າ.
- ຊ່ອງປ້ອນຂໍ້ມູນຫຼາຍຊ່ອງສໍາລັບຄວາມສາມາດໃນການນັບຄູ່.
ຄໍາຮ້ອງສະຫມັກຂອງ Pulse Counters
ເຄື່ອງວັດແທກກໍາມະຈອນຊອກຫາການນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນທົ່ວອຸດສາຫະກໍາຕ່າງໆ, ສະເຫນີຄວາມສາມາດໃນການວັດແທກແລະການຕິດຕາມທີ່ຊັດເຈນ. ໃນການຄຸ້ມຄອງພະລັງງານ, ພວກມັນເປັນສ່ວນປະກອບກັບເຄື່ອງວັດແທກອັດສະລິຍະ, ຕິດຕາມການບໍລິໂພກໄຟຟ້າຢ່າງຖືກຕ້ອງໂດຍການນັບກໍາມະຈອນຈາກຜົນຜະລິດເຄື່ອງວັດແທກພະລັງງານ. ນ້ຳ ແລະ ອາຍແກັສນຳໃຊ້ອຸປະກອນເຫຼົ່ານີ້ເພື່ອວັດແທກການໄຫຼຂອງປະລິມານ, ໂດຍແຕ່ລະກຳມະຈອນຈະກົງກັບຫົວໜ່ວຍປະລິມານສະເພາະ. ນອກເຫນືອຈາກສິ່ງອໍານວຍຄວາມສະດວກ, ເຄື່ອງນັບກໍາມະຈອນມີບົດບາດສໍາຄັນໃນເຄືອຂ່າຍເຊັນເຊີ, ການຕິດຕໍ່ກັບອຸປະກອນທີ່ລາຍງານຂໍ້ມູນຜ່ານຜົນຂອງກໍາມະຈອນ, ຊ່ວຍໃຫ້ການເກັບກໍາຂໍ້ມູນທີ່ມີປະສິດທິພາບແລະການວິເຄາະໃນການນໍາໃຊ້ທີ່ຫລາກຫລາຍເຊັ່ນ: ອັດຕະໂນມັດອຸດສາຫະກໍາ, ການຕິດຕາມສິ່ງແວດລ້ອມ, ແລະການຄົ້ນຄວ້າວິທະຍາສາດ.
ຜົນປະໂຫຍດການຕ້ານກໍາມະຈອນອຸດສາຫະກໍາ
Pulse counters ສະເຫນີຂໍ້ໄດ້ປຽບຈໍານວນຫລາຍໃນການຕັ້ງຄ່າອຸດສາຫະກໍາ, ການເພີ່ມປະສິດທິພາບ, ຄວາມຖືກຕ້ອງ, ແລະການຄວບຄຸມການດໍາເນີນງານໃນທົ່ວຄໍາຮ້ອງສະຫມັກຕ່າງໆ. ຄວາມສາມາດໃນການນັບແລະຕິດຕາມກໍາມະຈອນຢ່າງແນ່ນອນເຮັດໃຫ້ພວກເຂົາຂາດບໍ່ໄດ້ສໍາລັບຂະບວນການອັດຕະໂນມັດ, ການຄຸ້ມຄອງຊັບພະຍາກອນ, ແລະການບໍາລຸງຮັກສາອຸປະກອນ.
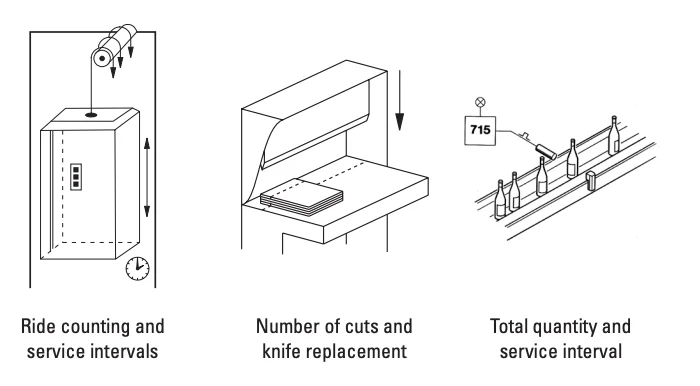
- ການຄວບຄຸມຂະບວນການປັບປຸງ: ເຄື່ອງນັບກໍາມະຈອນເຮັດໃຫ້ການກວດສອບຄວາມຖືກຕ້ອງຂອງວຽກງານທີ່ຊ້ໍາກັນ, ເຊັ່ນ: ການຕັດວັດສະດຸທີ່ມີຄວາມຍາວສະເພາະຫຼືການນັບຮອບການຜະລິດ, ຮັບປະກັນຄວາມສອດຄ່ອງແລະການຫຼຸດຜ່ອນຄວາມຜິດພາດ.
- ການດູແລປ້ອງກັນ: ໂດຍການຕິດຕາມການນໍາໃຊ້ເຄື່ອງຈັກຫຼືວົງຈອນການດໍາເນີນງານ, ເຄື່ອງນັບກໍາມະຈອນຊ່ວຍຄາດຄະເນຄວາມຕ້ອງການບໍາລຸງຮັກສາ, ຫຼຸດຜ່ອນເວລາຢຸດເຮັດວຽກແລະຍືດອາຍຸອຸປະກອນ.
- ການເພີ່ມປະສິດທິພາບພະລັງງານ ແລະຊັບພະຍາກອນ: ໃນການຄຸ້ມຄອງພະລັງງານ, ເຄື່ອງກວດຈັບກໍາມະຈອນຕິດຕາມກວດກາໄຟຟ້າ, ອາຍແກັສ, ຫຼືການບໍລິໂພກນ້ໍາໃນເວລາທີ່ແທ້ຈິງ, ອະນຸຍາດໃຫ້ອຸດສາຫະກໍາສາມາດກໍານົດຄວາມບໍ່ມີປະສິດທິພາບແລະປະຕິບັດມາດຕະການປະຫຍັດຄ່າໃຊ້ຈ່າຍ.
- ການເກັບກໍາຂໍ້ມູນທີ່ຖືກຕ້ອງ: ຄວາມສາມາດຂອງພວກມັນໃນການກັ່ນຕອງສຽງລົບກວນແລະສັນຍານ debounce ຮັບປະກັນຂໍ້ມູນທີ່ເຊື່ອຖືໄດ້ເຖິງແມ່ນວ່າໃນສະພາບແວດລ້ອມອຸດສາຫະກໍາທີ່ຮຸນແຮງ, ປັບປຸງການຕັດສິນໃຈແລະການປະຕິບັດລະບົບ.
- ຄວາມຍືດຫຍຸ່ນແລະການປະສົມປະສານ: ເຄື່ອງນັບກໍາມະຈອນທີ່ທັນສະໄຫມສາມາດຕິດຕໍ່ກັບລະບົບທີ່ຫຼາກຫຼາຍ, ລວມທັງເວທີ SCADA ແລະເຄືອຂ່າຍ IoT. ຄວາມສາມາດໃນການປັບຕົວນີ້ສະຫນັບສະຫນູນການເຊື່ອມໂຍງກັບໂຄງສ້າງພື້ນຖານອຸດສາຫະກໍາທີ່ມີຢູ່ແລ້ວສໍາລັບການຕິດຕາມກວດກາແລະການຄວບຄຸມສູນກາງ.
ວິທີການທົດສອບ Pulse Counter
ເມື່ອທົດສອບຕົວວັດແທກກໍາມະຈອນ, ມັນເປັນສິ່ງສໍາຄັນທີ່ຈະຫຼີກເວັ້ນຄວາມຜິດພາດທົ່ວໄປທີ່ສາມາດນໍາໄປສູ່ຜົນໄດ້ຮັບທີ່ບໍ່ຖືກຕ້ອງຫຼືການຕີຄວາມຫມາຍທີ່ບໍ່ຖືກຕ້ອງຂອງຂໍ້ມູນ. ນີ້ແມ່ນບາງຂໍ້ພິຈາລະນາທີ່ສໍາຄັນສໍາລັບການທົດສອບການຕ້ານການກໍາມະຈອນທີ່ມີປະສິດທິພາບ:
- ໃຊ້ແຫຼ່ງຄວາມຖີ່ທີ່ໝັ້ນຄົງ, ເປັນທີ່ຮູ້ຈັກເພື່ອສ້າງກໍາມະຈອນທົດສອບແທນທີ່ຈະໃສ່ຂໍ້ມູນດ້ວຍມື, ເຊິ່ງສາມາດແນະນໍາຄວາມຜິດພາດຂອງມະນຸດໄດ້.
- ຮັບປະກັນການປັບສັນຍານທີ່ຖືກຕ້ອງ, ລວມທັງການດີ້ນອອກສໍາລັບສະວິດກົນຈັກ, ເພື່ອປ້ອງກັນການນັບທີ່ບໍ່ຖືກຕ້ອງຈາກສິ່ງລົບກວນ ຫຼື bounce.
- ທົດສອບໃນທົ່ວລະດັບຄວາມຖີ່ຂອງກໍາມະຈອນທີ່ຄາດໄວ້ເພື່ອກວດສອບການປະຕິບັດການຕ້ານກັບຄວາມໄວທີ່ແຕກຕ່າງກັນ.
- ກວດສອບຄວາມຖືກຕ້ອງຂອງເຄົາເຕີໃນໄລຍະເວລາທີ່ຂະຫຍາຍອອກໄປ, ເພາະວ່າບາງບັນຫາອາດຈະສະແດງອອກຫຼັງຈາກການດໍາເນີນງານເປັນເວລາດົນນານເທົ່ານັ້ນ.
- ກວດເບິ່ງພຶດຕິກຳຂອງເຄົາເຕີໃກ້ກັບຄ່າການນັບສູງສຸດຂອງມັນ ເພື່ອຮັບປະກັນການໝູນວຽນທີ່ຖືກຕ້ອງ ຫຼືການທຳງານຄືນໃໝ່.
ບັນຫາທົ່ວໄປແລະການແກ້ໄຂບັນຫາຢູ່ໃນຕົວຕ້ານການ Pulse
ເຄື່ອງນັບກໍາມະຈອນສາມາດພົບບັນຫາທົ່ວໄປຈໍານວນຫນຶ່ງທີ່ມີຜົນກະທົບຕໍ່ຄວາມຖືກຕ້ອງແລະຄວາມຫນ້າເຊື່ອຖືຂອງພວກເຂົາ. ບັນຫາເລື້ອຍໆອັນໜຶ່ງແມ່ນການນັບກຳມະຈອນທີ່ບໍ່ຖືກຕ້ອງ, ມັກຈະເກີດຈາກບັນຫາການປະກາດສັນຍານ ຫຼືສຽງດັງໄຟຟ້າ. ເພື່ອແກ້ໄຂບັນຫານີ້, ການປະຕິບັດເຕັກນິກການ debounce ທີ່ເຫມາະສົມຫຼືການນໍາໃຊ້ຕົວກອງຮາດແວສາມາດປັບປຸງຄວາມຖືກຕ້ອງຢ່າງຫຼວງຫຼາຍ.
ສິ່ງທ້າທາຍອີກອັນຫນຶ່ງແມ່ນຕົວຕ້ານການບໍ່ສາມາດຕັ້ງຄ່າໃຫມ່ເປັນສູນເມື່ອສັນຍານຂາເຂົ້າຫຼຸດລົງ, ນໍາໄປສູ່ການອ່ານທີ່ຜິດພາດ. ນີ້ສາມາດແກ້ໄຂໄດ້ໂດຍການປະຕິບັດຫນ້າທີ່ຫມົດເວລາຫຼືການນໍາໃຊ້ວິທີແກ້ໄຂທີ່ອີງໃສ່ຊອບແວເພື່ອບັງຄັບໃຫ້ມີການຕັ້ງໃຫມ່ເມື່ອບໍ່ມີກໍາມະຈອນຖືກກວດພົບໃນໄລຍະເວລາທີ່ກໍານົດໄວ້. ນອກຈາກນັ້ນ, ຄໍາຮ້ອງສະຫມັກທີ່ມີຄວາມຖີ່ສູງອາດຈະປະສົບກັບກໍາມະຈອນທີ່ພາດໂອກາດນີ້ເນື່ອງຈາກຂໍ້ຈໍາກັດໃນອັດຕາການເກັບຕົວຢ່າງຂອງຕົວຕ້ານທານຫຼືຄວາມໄວການປຸງແຕ່ງ. ໃນກໍລະນີດັ່ງກ່າວ, ການຍົກລະດັບການຕ້ານການມີຄວາມສາມາດເພີ່ມເຕີມຫຼືການເພີ່ມປະສິດທິພາບວົງຈອນປັບສັນຍານສາມາດຊ່ວຍປັບປຸງປະສິດທິພາບ.
ເພື່ອຫຼຸດຜ່ອນການແຊກແຊງທາງແມ່ເຫຼັກໄຟຟ້າ, ຮັບປະກັນການວາງພື້ນດິນທີ່ເຫມາະສົມແລະປ້ອງກັນ, ກວດເບິ່ງວ່າຄວາມກວ້າງແລະຄວາມຖີ່ຂອງກໍາມະຈອນແມ່ນຢູ່ພາຍໃນຂອບເຂດທີ່ກໍານົດໄວ້ຂອງເຄົາເຕີ, ແລະປັບຕົວແລະຮັກສາເຄື່ອງຕ້ານການເປັນປະຈໍາເພື່ອປ້ອງກັນບັນຫາການລອຍແລະການສວມໃສ່. ພິຈາລະນານໍາໃຊ້ການແຍກທາງແສງສໍາລັບສະພາບແວດລ້ອມທີ່ມີສຽງດັງເພື່ອປັບປຸງຄວາມສົມບູນຂອງສັນຍານ. ເມື່ອແກ້ໄຂບັນຫາ, ມັນເປັນສິ່ງ ສຳ ຄັນທີ່ຈະແຍກບັນຫາຢ່າງເປັນລະບົບໂດຍການທົດສອບຕົວຕ້ານທານດ້ວຍສັນຍານທີ່ດີທີ່ຮູ້ຈັກແລະກວດສອບເສັ້ນທາງສັນຍານທັງ ໝົດ ຈາກແຫຼ່ງໄປຫາຕົວຕ້ານທານ.
Pulse vs Hour Meters
ເຄົາເຕີກວດກຳມະຈອນ ແລະເຄື່ອງວັດແທກຊົ່ວໂມງແມ່ນທັງສອງເຄື່ອງມືທີ່ສຳຄັນໃນການຈັດການສາທາລະນູປະໂພກ ແລະການຕິດຕາມອຸປະກອນ, ແຕ່ພວກມັນຮັບໃຊ້ຈຸດປະສົງທີ່ແຕກຕ່າງກັນ ແລະດຳເນີນງານຕາມຫຼັກການທີ່ແຕກຕ່າງກັນ.
ເຄື່ອງວັດແທກກຳມະຈອນຖືກອອກແບບເພື່ອວັດແທກເຫດການທີ່ແຍກກັນ ຫຼື ຫົວໜ່ວຍການບໍລິໂພກ ເຊັ່ນ: ກິໂລວັດໂມງຂອງກະແສໄຟຟ້າ ຫຼື ລິດຂອງນ້ຳ.. ພວກມັນເຮັດວຽກໂດຍການກວດຫາ ແລະນັບກຳມະຈອນທີ່ສ້າງຂຶ້ນໂດຍເຄື່ອງວັດແທກຜົນປະໂຫຍດ ຫຼືເຊັນເຊີ, ໂດຍແຕ່ລະກຳມະຈອນສະແດງເຖິງປະລິມານສະເພາະ.. ນີ້ອະນຸຍາດໃຫ້ສໍາລັບການວັດແທກການບໍລິໂພກທີ່ຊັດເຈນແລະການຕິດຕາມເວລາທີ່ແທ້ຈິງຂອງການນໍາໃຊ້ປະໂຫຍດ. ເຄື່ອງນັບກໍາມະຈອນແມ່ນເປັນປະໂຫຍດໂດຍສະເພາະສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການຄວາມຖືກຕ້ອງສູງແລະລາຍລະອຽດການນໍາໃຊ້ຂໍ້ມູນ, ເຊັ່ນ: ລະບົບການຄຸ້ມຄອງພະລັງງານຫຼືການກວດສອບຂະບວນການອຸດສາຫະກໍາ..
ໃນທາງກົງກັນຂ້າມ, ເຄື່ອງວັດແທກຊົ່ວໂມງແມ່ນໃຊ້ຕົ້ນຕໍເພື່ອຕິດຕາມເວລາປະຕິບັດງານຂອງອຸປະກອນຫຼືເຄື່ອງຈັກ. ພວກມັນບັນທຶກເວລາແລ່ນສະສົມ, ໂດຍທົ່ວໄປແລ້ວເປັນຊົ່ວໂມງແລະສ່ວນຫນຶ່ງຂອງຊົ່ວໂມງ, ເຊິ່ງເປັນສິ່ງສໍາຄັນສໍາລັບການກໍານົດເວລາການບໍາລຸງຮັກສາ, ການຄຸ້ມຄອງການຮັບປະກັນ, ແລະການປະເມີນການນໍາໃຊ້ອຸປະກອນ.. ເຄື່ອງວັດແທກຊົ່ວໂມງມີສອງປະເພດຕົ້ນຕໍ: ກົນຈັກ, ເຊິ່ງໃຊ້ອົງປະກອບທາງກາຍະພາບເພື່ອຕິດຕາມເວລາ, ແລະດິຈິຕອນ, ເຊິ່ງໃຊ້ວົງຈອນເອເລັກໂຕຣນິກສໍາລັບການຮັກສາເວລາທີ່ຊັດເຈນກວ່າ.. ໃນຂະນະທີ່ມີຄວາມຫລາກຫລາຍກ່ວາເຄື່ອງວັດແທກກໍາມະຈອນໃນແງ່ຂອງຄວາມສາມາດໃນການວັດແທກ, ເຄື່ອງວັດແທກຊົ່ວໂມງແມ່ນຂາດບໍ່ໄດ້ສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ໄລຍະເວລາປະຕິບັດງານເປັນຕົວວັດແທກທີ່ສໍາຄັນ, ເຊັ່ນໃນເຮືອຍານພາຫະນະ, ເຄື່ອງຈັກອຸດສາຫະກໍາ, ແລະອຸປະກອນໃຫ້ເຊົ່າ..
ສຳຫຼວດເພີ່ມເຕີມ:ຄູ່ມືເຕັມໄປຫາແມັດຊົ່ວໂມງ
