
ເມື່ອພະລັງງານຕ່ຳພົບກັບພະລັງງານສູງ: ວິກິດການວົງຈອນຄວບຄຸມ
ທ່ານໄດ້ໃຊ້ເວລາຫຼາຍອາທິດໃນການອອກແບບລະບົບອັດຕະໂນມັດທີ່ສົມບູນແບບ. ບາງທີມັນອາດຈະເປັນເຄື່ອງຄວບຄຸມຊົນລະປະທານອັດສະລິຍະສຳລັບເຮືອນແກ້ວຂອງທ່ານ, ລະບົບສາຍພານອຸດສາຫະກຳ, ຫຼືສູນກາງອັດຕະໂນມັດໃນເຮືອນ. ລະຫັດ Arduino ຂອງທ່ານແມ່ນສະຫງ່າງາມ, ເຫດຜົນຂອງທ່ານແມ່ນບໍ່ມີຂໍ້ບົກພ່ອງ, ແລະທ່ານພ້ອມທີ່ຈະເຊື່ອມຕໍ່ທຸກຢ່າງ.
ຫຼັງຈາກນັ້ນຄວາມເປັນຈິງກໍ່ເກີດຂື້ນ.
ໄມໂຄຣຄອນໂທລເລີຂອງທ່ານສົ່ງອອກ 5V ທີ່ 40 milliamps. ແຕ່ປັ໊ມນ້ໍາ 220V ທີ່ທ່ານຕ້ອງການຄວບຄຸມດຶງ 8 amps. ທ່ານພະຍາຍາມເຊື່ອມຕໍ່ພວກມັນດ້ວຍ transistor—ມັນຮ້ອນເກີນໄປ. ທ່ານພະຍາຍາມເຊື່ອມຕໍ່ໂດຍກົງຜ່ານ MOSFET—Arduino ຂອງທ່ານປ່ອຍຄວັນມະຫັດສະຈັນຂອງມັນອອກມາແລະຕາຍ. ຫຼືຮ້າຍແຮງກວ່ານັ້ນ: ບໍ່ມີຫຍັງເກີດຂື້ນເລີຍ. ພາລະນັ່ງຢູ່ທີ່ນັ້ນ, ເຍາະເຍີ້ຍລະດັບວິສະວະກຳຂອງທ່ານ, ປະຕິເສດທີ່ຈະເປີດ.
ດັ່ງນັ້ນທ່ານຈະເຊື່ອມຕໍ່ຊ່ອງຫວ່າງອັນໃຫຍ່ຫຼວງນີ້ລະຫວ່າງສັນຍານຄວບຄຸມພະລັງງານຕ່ຳແລະພາລະອຸດສາຫະກຳພະລັງງານສູງໄດ້ແນວໃດໂດຍບໍ່ທຳລາຍອຸປະກອນລາຄາແພງຫຼືສ້າງອັນຕະລາຍດ້ານຄວາມປອດໄພ?
ຄຳຕອບແມ່ນງ່າຍກວ່າທີ່ທ່ານຄິດ—ແຕ່ການເລືອກ ຜິດ ວິທີແກ້ໄຂສາມາດເຮັດໃຫ້ທ່ານເສຍເວລາ, ເງິນ, ແລະອາດຈະເປັນຊີວິດ. ຄູ່ມືທີ່ສົມບູນແບບນີ້ຈະປ່ຽນທ່ານຈາກຄວາມສັບສົນໄປສູ່ຄວາມໝັ້ນໃຈໃນການກຳນົດ, ເລືອກ, ແລະປະຕິບັດໂມດູນ relay ສໍາລັບຄໍາຮ້ອງສະຫມັກໃດໆ.
ເປັນຫຍັງໄມໂຄຣຄອນໂທລເລີຂອງທ່ານຈຶ່ງບໍ່ສາມາດຄວບຄຸມພາລະໃນໂລກຕົວຈິງໄດ້ (ແລະເປັນຫຍັງມັນຈຶ່ງດີແທ້ໆ)
ກ່ອນທີ່ພວກເຮົາຈະເຂົ້າໄປໃນໂມດູນ relay, ໃຫ້ເຂົ້າໃຈ ເປັນຫຍັງ ບັນຫານີ້ມີຢູ່ໃນສະຖານທີ່ທໍາອິດ.
ໄມໂຄຣຄອນໂທລເລີປົກກະຕິຂອງທ່ານ—ບໍ່ວ່າຈະເປັນ Arduino, Raspberry Pi, ຫຼື PLC ອຸດສາຫະກໍາ—ຖືກອອກແບບມາເພື່ອປະມວນຜົນຂໍ້ມູນ, ບໍ່ແມ່ນເຄື່ອງຈັກຫນັກ. GPIO (General Purpose Input/Output) pins ໃນອຸປະກອນເຫຼົ່ານີ້ໂດຍທົ່ວໄປແລ້ວສົ່ງອອກ:
- ແຮງດັນ: 3.3V ຫາ 5V DC
- ກະແສໄຟຟ້າ: 20-40 milliamps ສູງສຸດ
- ພະລັງງານ: ປະມານ 0.2 ວັດ
ໃນຂະນະດຽວກັນ, ອຸປະກອນໃນໂລກຕົວຈິງຕ້ອງການຫຼາຍກວ່າ:
- ປັ໊ມນ້ໍາມາດຕະຖານ: 220V AC ທີ່ 5-10 amps (1,100-2,200 ວັດ)
- ມໍເຕີອຸດສາຫະກໍາ: 480V AC ທີ່ 15 amps (7,200 ວັດ)
- ເຖິງແມ່ນວ່າແສງສະຫວ່າງໃນຄົວເຮືອນງ່າຍດາຍ: 120V AC ທີ່ 0.5 amps (60 ວັດ)
ຄະນິດສາດແມ່ນໂຫດຮ້າຍ: ໄມໂຄຣຄອນໂທລເລີຂອງທ່ານສາມາດສະຫນອງ 0.2 ວັດ, ແຕ່ຕ້ອງການຄວບຄຸມອຸປະກອນທີ່ບໍລິໂພກ 60 ຫາ 7,200 ວັດ. ນັ້ນຄືກັບການພະຍາຍາມລາກເຮືອຂົນສົ່ງດ້ວຍຕ່ອງໂສ້ລົດຖີບ.
ແຕ່ນີ້ແມ່ນບັນຫາທີ່ເລິກເຊິ່ງກວ່າ—ມັນບໍ່ພຽງແຕ່ກ່ຽວກັບພະລັງງານເທົ່ານັ້ນ. ມັນກ່ຽວກັບການແຍກແລະຄວາມປອດໄພ. ເມື່ອທ່ານກໍາລັງເຮັດວຽກກັບແຮງດັນສູງ (ສິ່ງໃດແດ່ທີ່ສູງກວ່າ 50V AC ຫຼື 120V DC), ຄວາມຜິດພາດໃນການ wiring ຫນຶ່ງສາມາດ:
- ສົ່ງ 220V AC ກັບເຂົ້າໄປໃນໄມໂຄຣຄອນໂທລເລີຂອງທ່ານ, ເຮັດໃຫ້ມັນລະເຫີຍທັນທີ
- ສ້າງເສັ້ນທາງສໍາລັບແຮງດັນອັນຕະລາຍທີ່ຈະເຂົ້າຫາທ່ານຜ່ານ enclosures ໂລຫະ
- ເຮັດໃຫ້ເກີດໄຟໄຫມ້ໄຟຟ້າຈາກ arcing ແລະ overheating
- ລະເມີດລະຫັດໄຟຟ້າທີ່ຕ້ອງການ galvanic isolation
Key Takeaway: ທ່ານຕ້ອງການ “ຕົວແປໄຟຟ້າ”—ອຸປະກອນທີ່ຍອມຮັບສັນຍານຄວບຄຸມຂະຫນາດນ້ອຍແຕ່ສາມາດປ່ຽນພາລະພະລັງງານຂະຫນາດໃຫຍ່, ທັງຫມົດໃນຂະນະທີ່ຮັກສາສິ່ງກີດຂວາງຄວາມປອດໄພທາງດ້ານຮ່າງກາຍລະຫວ່າງສອງວົງຈອນ. ນີ້ແມ່ນສິ່ງທີ່ໂມດູນ relay ໄດ້ຖືກອອກແບບມາເພື່ອເຮັດ.
ໂມດູນ Relay ແມ່ນຫຍັງ? ຂົວໄຟຟ້າຂອງທ່ານລະຫວ່າງສອງໂລກ


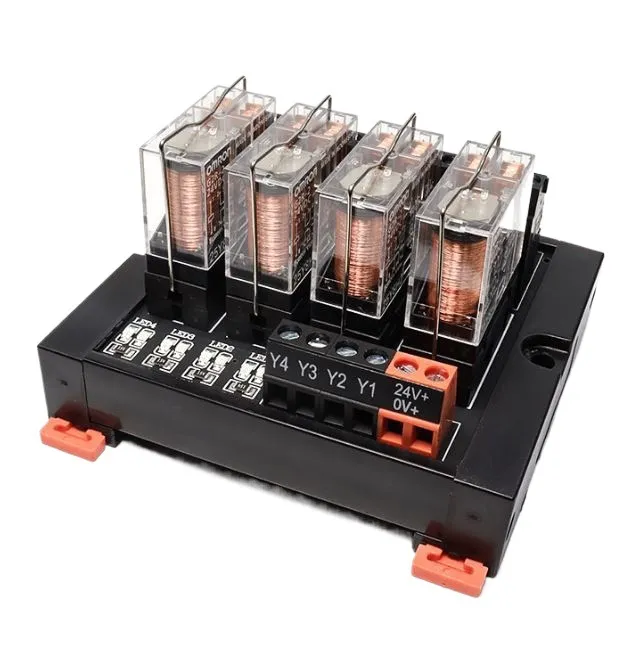
ກ ໂມດູນ relay ແມ່ນແຜງວົງຈອນທີ່ບັນຈຸຫນຶ່ງຫຼືຫຼາຍກວ່າສະວິດ electromechanical ຫຼື solid-state, ພ້ອມກັບອົງປະກອບສະຫນັບສະຫນູນທີ່ປົກປ້ອງທັງວົງຈອນຄວບຄຸມຂອງທ່ານແລະ relay ເອງ. ຄິດວ່າມັນເປັນຂົວໄຟຟ້າທີ່ຊັບຊ້ອນທີ່ມີລາງລົດໄຟຄວາມປອດໄພໃນຕົວ.
ກາຍະວິພາກຂອງໂມດູນ Relay
ບໍ່ເຫມືອນກັບ relay standalone (ພຽງແຕ່ກົນໄກການປ່ຽນ), ໂມດູນ relay ແມ່ນລະບົບຍ່ອຍທີ່ສົມບູນທີ່ປະກອບດ້ວຍ:
1. Relay(s) ເອງ
- ປະເພດ Electromagnetic: ໃຊ້ coil ເພື່ອສ້າງສະຫນາມແມ່ເຫຼັກທີ່ເຄື່ອນຍ້າຍຕິດຕໍ່ທາງດ້ານຮ່າງກາຍ (ທົ່ວໄປທີ່ສຸດ)
- ປະເພດ Solid-state (SSR): ໃຊ້ semiconductors ເພື່ອປ່ຽນໂດຍບໍ່ມີພາກສ່ວນເຄື່ອນທີ່ (ໄວກວ່າ, ອາຍຸຍືນກວ່າ, ແຕ່ມີລາຄາແພງກວ່າ)
2. Input Control Circuitry
- Terminal pins/connectors: ບ່ອນທີ່ສັນຍານຄວບຄຸມແຮງດັນຕ່ໍາຂອງທ່ານເຊື່ອມຕໍ່ (ປົກກະຕິແລ້ວ 3-4 pins: VCC, GND, Signal, ບາງຄັ້ງ Enable)
- Input buffer: ປ້ອງກັນການເພີ່ມຂື້ນຂອງແຮງດັນຈາກດ້ານຄວບຄຸມ
3. Output Power Contacts
- Screw terminals (ປົກກະຕິແລ້ວ 3): Common (COM), Normally Open (NO), ແລະ Normally Closed (NC)
- ເຫຼົ່ານີ້ຈັດການການປ່ຽນແຮງດັນສູງ, ກະແສໄຟຟ້າສູງ
4. Critical Protection Components
- Flyback diodes: ປ້ອງກັນການເພີ່ມຂື້ນຂອງແຮງດັນໃນເວລາທີ່ relay coil de-energizes (ສິ່ງເຫຼົ່ານີ້ຊ່ວຍປະຢັດຊີວິດຂອງ microcontroller ຂອງທ່ານ)
- Optocouplers: ສ້າງ optical isolation ລະຫວ່າງດ້ານຄວບຄຸມແລະພະລັງງານ (ໃນໂມດູນ opto-isolated)
- LED indicators: ການຢືນຢັນສາຍຕາຂອງລັດ relay
- Transistor drivers: ຂະຫຍາຍສັນຍານຄວບຄຸມທີ່ອ່ອນແອໃຫ້ພຽງພໍໃນປະຈຸບັນສໍາລັບ relay coil
ສິ່ງທີ່ເຮັດໃຫ້ມັນ “Modular”?
ຄໍາວ່າ “ໂມດູນ” ແມ່ນສໍາຄັນຢູ່ທີ່ນີ້. ອຸປະກອນເຫຼົ່ານີ້ມາໃນການຕັ້ງຄ່າທີ່ໄດ້ມາດຕະຖານ:
- ຊ່ອງດຽວ: ຄວບຄຸມໜຶ່ງໂຫຼດ (ໜຶ່ງຣີເລ)
- 2-ຊ່ອງ, 4-ຊ່ອງ, 8-ຊ່ອງ, 16-ຊ່ອງ: ຄວບຄຸມຫຼາຍໂຫຼດທີ່ເປັນເອກະລາດ
- ຮູບແບບກະດານ: PCB mount, DIN rail mount, ປະເພດເຕົ້າສຽບທີ່ສາມາດສຽບໄດ້
- ອັດຕາແຮງດັນໄຟຟ້າມາດຕະຖານ: 5V, 12V, 24V input / 120V AC, 220V AC, 480V AC output
专业提示: ໂມດູນຣີເລບໍ່ແມ່ນພຽງແຕ່ຣີເລທີ່ເຊື່ອມໃສ່ກະດານ. ອົງປະກອບສະໜັບສະໜູນ—ໂດຍສະເພາະໄດໂອດ flyback ແລະ optocoupler—ແມ່ນສິ່ງທີ່ປ້ອງກັນຄວາມລົ້ມເຫຼວທີ່ຮ້າຍແຮງ. ການພະຍາຍາມສ້າງ “ໂມດູນຣີເລ” ຂອງທ່ານເອງດ້ວຍຣີເລເປົ່າແມ່ນຄືກັບການໂດດskydiving ດ້ວຍຜ້າປູບ່ອນນອນແທນທີ່ຈະເປັນ parachute. ມັນອາດຈະເຮັດວຽກ... ຄັ້ງດຽວ.
ໂມດູນຣີເລເຮັດວຽກແນວໃດ? ລໍາດັບການປ່ຽນເທື່ອລະຂັ້ນຕອນ
ການເຂົ້າໃຈກົນໄກພາຍໃນຊ່ວຍໃຫ້ທ່ານແກ້ໄຂບັນຫາແລະເລືອກໂມດູນທີ່ຖືກຕ້ອງ. ນີ້ແມ່ນສິ່ງທີ່ເກີດຂື້ນຕັ້ງແຕ່ນາທີທີ່ທ່ານສົ່ງສັນຍານຄວບຄຸມ:
ຂັ້ນຕອນທີ 1: ສັນຍານຄວບຄຸມຖືກນໍາໃຊ້ (The Trigger)
ໄມໂຄຣຄອນໂທລເລີຂອງທ່ານສົ່ງສັນຍານ logic HIGH (ໂດຍປົກກະຕິ 3.3V ຫຼື 5V) ໄປຫາ pin input ຂອງໂມດູນຣີເລ. ສັນຍານຂະຫນາດນ້ອຍນີ້ເດີນທາງຜ່ານ:
- ວົງຈອນປ້ອງກັນ input (ຕົວຕ້ານທານຈໍາກັດກະແສ)
- Optocoupler LED (ຖ້າມີ)—ປ່ຽນສັນຍານໄຟຟ້າເປັນແສງ
- Phototransistor (ໄດ້ຮັບແສງ, ຜະລິດສັນຍານໄຟຟ້າຢູ່ດ້ານທີ່ໂດດດ່ຽວ)
- Transistor driver (ຂະຫຍາຍສັນຍານເປັນ ~50-200mA ທີ່ຕ້ອງການສໍາລັບ coil ຣີເລ)
ຂັ້ນຕອນທີ 2: ການກະຕຸ້ນແມ່ເຫຼັກໄຟຟ້າ (The Muscle)
ກະແສໄຟຟ້າທີ່ຂະຫຍາຍໄຫຼຜ່ານ coil ແມ່ເຫຼັກໄຟຟ້າຂອງຣີເລ (ໂດຍປົກກະຕິ 70-400 ohms ຄວາມຕ້ານທານ). ນີ້ສ້າງສະຫນາມແມ່ເຫຼັກທີ່ມີຄວາມເຂັ້ມແຂງພຽງພໍທີ່ຈະ:
- ດຶງໂລຫະ armature (ແຂນເຄື່ອນທີ່) ໄປສູ່ coil
- ເອົາຊະນະຄວາມເຄັ່ງຕຶງຂອງພາກຮຽນ spring ທີ່ຖືການຕິດຕໍ່ຫ່າງກັນ
- ການເຄື່ອນໄຫວທາງກົນຈັກນີ້ໃຊ້ເວລາ 5-15 ມິນລິວິນາທີ
ຂັ້ນຕອນທີ 3: ການປິດການຕິດຕໍ່ (The Switch)
ການເຄື່ອນໄຫວຂອງ armature ເຮັດໃຫ້ຫນຶ່ງໃນສອງການກະທໍາ:
ສໍາລັບການຕັ້ງຄ່າ Normally Open (NO):
- ການຕິດຕໍ່ແມ່ນແຍກອອກຈາກກັນໂດຍຄ່າເລີ່ມຕົ້ນ (ວົງຈອນເປີດ)
- Armature ດຶງການຕິດຕໍ່ເຂົ້າກັນ → ວົງຈອນປິດ → ພະລັງງານໄຫຼໄປຫາໂຫຼດ
ສໍາລັບການຕັ້ງຄ່າ Normally Closed (NC):
- ການຕິດຕໍ່ແມ່ນສໍາຜັດໂດຍຄ່າເລີ່ມຕົ້ນ (ວົງຈອນປິດ)
- Armature ດຶງການຕິດຕໍ່ອອກຈາກກັນ → ວົງຈອນເປີດ → ພະລັງງານຢຸດໄຫຼ
ທາງດ້ານຮ່າງກາຍ air gap ລະຫວ່າງການຕິດຕໍ່ (ໂດຍປົກກະຕິ 1-2mm) ໃຫ້ການໂດດດ່ຽວ galvanic ທີ່ແທ້ຈິງ—ການແຍກທາງດ້ານຮ່າງກາຍທີ່ສົມບູນລະຫວ່າງວົງຈອນຄວບຄຸມ 5V ຂອງທ່ານແລະວົງຈອນພະລັງງານ 220V ຂອງທ່ານ.
ຂັ້ນຕອນທີ 4: Load Energization (The Result)
ເມື່ອການຕິດຕໍ່ປິດ, ກະແສໄຟຟ້າ AC ຫຼື DC ແຮງດັນສູງໄຫຼຜ່ານ:
- COM (Common) terminal → ໄດ້ຮັບພະລັງງານຈາກແຫຼ່ງ
- NO (Normally Open) terminal → ເຊື່ອມຕໍ່ກັບໂຫຼດຂອງທ່ານ
- ໂຫຼດເຮັດວຽກ (ມໍເຕີຫມຸນ, ແສງສະຫວ່າງ, solenoid actuates, ແລະອື່ນໆ)
ຂັ້ນຕອນທີ 5: De-energization (The Shutdown)
ເມື່ອທ່ານເອົາສັນຍານຄວບຄຸມອອກ (logic LOW), ຂະບວນການຈະປີ້ນກັບກັນ:
- ກະແສໄຟຟ້າຢຸດໄຫຼຜ່ານ coil ຣີເລ
- ສະຫນາມແມ່ເຫຼັກ collapses
- ຊ່ວງເວລາທີ່ສໍາຄັນ: ສະຫນາມແມ່ເຫຼັກ collapsing ສ້າງແຮງດັນໄຟຟ້າປີ້ນກັບກັນ (ແຮງດັນໄຟຟ້າ flyback) ທີ່ສາມາດບັນລຸ 100V+
- Flyback diode ທັນທີດໍາເນີນການ, shunting spike ນີ້ຢ່າງປອດໄພກັບພື້ນດິນ
- ຄວາມເຄັ່ງຕຶງຂອງພາກຮຽນ spring ດຶງ armature ກັບຄືນສູ່ຕໍາແຫນ່ງເລີ່ມຕົ້ນ
- ການຕິດຕໍ່ແຍກອອກຈາກກັນ → ວົງຈອນພະລັງງານເປີດ → ໂຫຼດ de-energizes
专业提示: ໄດໂອດ flyback ບໍ່ແມ່ນ fluff ການຕະຫຼາດທາງເລືອກ—ມັນເປັນອົງປະກອບທີ່ປ້ອງກັນບໍ່ໃຫ້ $25 Arduino ຂອງທ່ານກາຍເປັນ paperweight ລາຄາແພງ. ຖ້າບໍ່ມີມັນ, ແຮງດັນໄຟຟ້າຈາກ coil collapse ສາມາດເຈາະຜ່ານ pin output ຂອງ microcontroller ຂອງທ່ານ, ທໍາລາຍ IC ທັງຫມົດ. ກວດສອບສະເໝີວ່າໂມດູນຣີເລຂອງທ່ານປະກອບມີການປົກປ້ອງນີ້.
ປະເພດຂອງໂມດູນຣີເລ: ການເລືອກອາວຸດໄຟຟ້າຂອງທ່ານ
ບໍ່ແມ່ນໂມດູນຣີເລທັງໝົດຖືກສ້າງຂື້ນເທົ່າທຽມກັນ. ປະເພດທີ່ທ່ານເລືອກແມ່ນຂຶ້ນກັບຄວາມຕ້ອງການຂອງແອັບພລິເຄຊັນຂອງທ່ານສໍາລັບຄວາມໄວ, ຄວາມແມ່ນຍໍາ, ຄວາມສາມາດໃນປະຈຸບັນ, ແລະສະພາບແວດລ້ອມ.
1. Electromagnetic Relay (EMR) Modules — The Workhorse
ພວກເຂົາເຮັດວຽກແນວໃດ: ການຕິດຕໍ່ທາງດ້ານຮ່າງກາຍຍ້າຍໂດຍ coil ແມ່ເຫຼັກໄຟຟ້າ
ຂໍ້ດີ:
- ຄວາມສາມາດໃນການຮັບກະແສໄຟຟ້າສູງ: ສາມາດຈັດການ 5A ຫາ 30A ຕໍ່ການຕິດຕໍ່
- ການໂດດດ່ຽວ galvanic ທີ່ແທ້ຈິງ: ຊ່ອງຫວ່າງທາງອາກາດທາງກາຍະພາບໃຫ້ການແຍກໄຟຟ້າທີ່ສົມບູນ
- ຄ່າໃຊ້ຈ່າຍຕ່ໍາ: $2-$10 ຕໍ່ຊ່ອງທາງ relay
- ຄວາມເຂົ້າກັນໄດ້ທົ່ວໄປ: ເຮັດວຽກກັບ AC ຫຼື DC ໂຫຼດໄດ້ດີເທົ່າທຽມກັນ
- ບໍ່ມີບັນຫາການລະບາຍຄວາມຮ້ອນ: ບໍ່ເຫມືອນກັບ semiconductors, contacts ບໍ່ໄດ້ສ້າງຄວາມຮ້ອນໃນລະຫວ່າງການນໍາ
ຂໍ້ເສຍ:
- ການສວມໃສ່ກົນຈັກ: Contacts ເສື່ອມໂຊມຫຼັງຈາກ 100,000 ຫາ 1,000,000 ຮອບວຽນ
- ການປ່ຽນຊ້າ: ເວລາຕອບສະໜອງ 5-15ms
- ສຽງຄລິກທີ່ໄດ້ຍິນ: ແຕ່ລະສະວິດເຮັດໃຫ້ເກີດສຽງ
- Contact bounce: Contacts ສາມາດ bounce ເປີດ/ປິດສໍາລັບ 1-2ms ໃນລະຫວ່າງການປ່ຽນແປງ
- ຂະໜາດ: ໃຫຍ່ກວ່າທາງເລືອກ solid-state
ດີທີ່ສຸດສຳລັບ: ອຸປະກອນອຸດສາຫະກໍາ, ການຄວບຄຸມ HVAC, motor starters, ຄໍາຮ້ອງສະຫມັກໃດໆທີ່ຄວາມສາມາດໃນປະຈຸບັນແລະການແຍກ trump ຄວາມໄວ
2. Solid-State Relay (SSR) Modules — The Speed Demon
ພວກເຂົາເຮັດວຽກແນວໃດ: Semiconductors (TRIACs, thyristors, MOSFETs) ສະຫຼັບໂດຍບໍ່ມີພາກສ່ວນເຄື່ອນທີ່
ຂໍ້ດີ:
- ການປ່ຽນທີ່ໄວທີ່ສຸດ: ເວລາຕອບສະໜອງ Sub-millisecond
- ປະຕິບັດການງຽບ: ບໍ່ມີສຽງກົນຈັກ
- ອາຍຸການໃຊ້ງານຍາວນານ: ບໍ່ມີການສວມໃສ່ຕິດຕໍ່ = ລ້ານຫາພັນລ້ານຮອບວຽນ
- ບໍ່ມີການກະໂດດຂອງໜ້າສຳຜັດ: ການປ່ຽນສະອາດສໍາລັບເຄື່ອງໃຊ້ໄຟຟ້າທີ່ລະອຽດອ່ອນ
- ກະທັດຮັດ: ຮອຍຕີນນ້ອຍກວ່າ EMR ທຽບເທົ່າ
ຂໍ້ເສຍ:
- ການສ້າງຄວາມຮ້ອນ: Semiconductors ລະບາຍ 1-2 ວັດເຖິງແມ່ນວ່າ “ເປີດ,” ຮຽກຮ້ອງໃຫ້ມີ heatsinks
- ແຮງດັນຕົກ: ໂດຍປົກກະຕິ 1-2V ຫຼຸດລົງໃນທົ່ວ SSR ໃນເວລາທີ່ດໍາເນີນການ (ພະລັງງານສູນເສຍ)
- ຄ່າໃຊ້ຈ່າຍສູງກວ່າ: $10-$50+ ຕໍ່ relay
- ປະເພດການໂຫຼດທີ່ລະອຽດອ່ອນ: ບາງ SSRs ເຮັດວຽກກັບ AC ເທົ່ານັ້ນ, ຄົນອື່ນພຽງແຕ່ DC
- ຄວາມທົນທານຕໍ່ການກະຕຸ້ນຕ່ໍາ: ມີຄວາມສ່ຽງຕໍ່ການກະຕຸ້ນແຮງດັນເກີນກວ່າການຕິດຕໍ່ກົນຈັກ
ດີທີ່ສຸດສຳລັບ: ການປ່ຽນຄວາມຖີ່ສູງ (ການຄວບຄຸມ PID, ຄໍາຮ້ອງສະຫມັກ PWM), ສະພາບແວດລ້ອມທີ່ລະອຽດອ່ອນຕໍ່ອຸນຫະພູມທີ່ການຄລິກແມ່ນບໍ່ສາມາດຍອມຮັບໄດ້, ຄໍາຮ້ອງສະຫມັກທີ່ມີອາຍຸຍືນ (> 1 ລ້ານຮອບວຽນ)
3. Hybrid Relay Modules — The Best of Both Worlds
ສົມທົບ relay electromagnetic ສໍາລັບການປ່ຽນພະລັງງານກັບ SSR ສໍາລັບຫນ້າທີ່ນໍາທາງຫຼືການສະກັດກັ້ນ arc.
ດີທີ່ສຸດສຳລັບ: ຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການທັງຄວາມສາມາດໃນປະຈຸບັນສູງແລະຊີວິດການຕິດຕໍ່ທີ່ຍາວນານ (ເຊັ່ນ: ວົງຈອນ soft-start ມໍເຕີ)
4. Specialty Configurations
- Latching relays: ຢູ່ໃນຕໍາແຫນ່ງສຸດທ້າຍໂດຍບໍ່ມີພະລັງງານ coil ຢ່າງຕໍ່ເນື່ອງ (ປະສິດທິພາບດ້ານພະລັງງານສໍາລັບຄໍາຮ້ອງສະຫມັກຫມໍ້ໄຟ)
- Time-delay relays: ວົງຈອນຈັບເວລາໃນຕົວສໍາລັບການປ່ຽນຊ້າ
- Safety relays: Redundant contacts ກັບກົນໄກການບັງຄັບໃຫ້ (ສໍາຄັນສໍາລັບຄວາມປອດໄພຂອງເຄື່ອງຈັກ)
- High-frequency/RF relays: ຊ່ຽວຊານສໍາລັບວິທະຍຸແລະໂທລະຄົມ (50Ω impedance matching, ການສູນເສຍການໃສ່ຫນ້ອຍທີ່ສຸດ)
Pro-Tip : SSRs ເບິ່ງຄືວ່າດີກວ່າໃນເຈ້ຍ—ໄວຂຶ້ນ, ອາຍຸຍືນກວ່າ, ງຽບ. ແຕ່ພວກເຂົາເປັນທາງເລືອກທີ່ບໍ່ຖືກຕ້ອງສໍາລັບການຄວບຄຸມມໍເຕີອຸດສາຫະກໍາສ່ວນໃຫຍ່. ເປັນຫຍັງ? ການຫຼຸດລົງຂອງແຮງດັນສ້າງຄວາມຮ້ອນ, ແລະຄວາມຮ້ອນແມ່ນສັດຕູໃນຕູ້ຄວບຄຸມທີ່ຮ້ອນແລ້ວ. ນອກຈາກນັ້ນ, EMRs ຈັດການກັບກະແສໄຟຟ້າໃນປະຈຸບັນ (6-8x ກະແສປົກກະຕິໃນເວລາທີ່ມໍເຕີເລີ່ມຕົ້ນ) ດີກວ່າ semiconductors. ຈັບຄູ່ປະເພດ relay ກັບຄໍາຮ້ອງສະຫມັກ, ບໍ່ແມ່ນການໂຄສະນາເຜີຍແຜ່ແຜ່ນສະເພາະ.
The Complete Relay Module Selection Guide: Six Critical Specifications
ການເລືອກໂມດູນ relay ທີ່ບໍ່ຖືກຕ້ອງແມ່ນມີລາຄາແພງ—ການຕິດຕໍ່ທີ່ຖືກເຜົາ, ໂຫຼດທີ່ລົ້ມເຫລວ, ຫຼືວົງຈອນຄວບຄຸມທີ່ຖືກທໍາລາຍ. ປະຕິບັດຕາມວິທີການລະບົບນີ້ເພື່ອລະບຸຢ່າງຖືກຕ້ອງທຸກຄັ້ງ.
ຂັ້ນຕອນທີ 1: ກໍານົດຄວາມຕ້ອງການໂຫຼດຂອງທ່ານ
ກ່ອນທີ່ທ່ານຈະເບິ່ງ specs relay, ລັກສະນະຢ່າງລະອຽດກ່ຽວກັບການໂຫຼດຂອງທ່ານ:
ແຮງດັນ:
- ແຮງດັນໄຟຟ້າແມ່ນຫຍັງ? (120V AC, 220V AC, 24V DC, ແລະອື່ນໆ)
- ນີ້ຈະປ່ຽນແປງບໍ? (ອຸປະກອນບາງຢ່າງມີຄວາມສາມາດແຮງດັນສອງເທົ່າ)
ກະແສໄຟຟ້າ:
- ແມ່ນຫຍັງ running current (ສະພາບຄົງທີ່)?
- ແມ່ນຫຍັງ ກະແສໄຟຟ້າແຮງດັນສູງ (startup surge)? ສໍາລັບມໍເຕີ, ນີ້ແມ່ນປົກກະຕິແລ້ວ 6-10x running current ສໍາລັບ 100-500ms
- ແມ່ນຫຍັງ locked-rotor current (ສະຖານະການທີ່ຮ້າຍແຮງທີ່ສຸດຖ້າ motor stalls)?
ປະເພດການໂຫຼດ:
- Resistive: ເຄື່ອງເຮັດຄວາມຮ້ອນ, ໄຟ incandescent (ງ່າຍທີ່ສຸດໃນການຕິດຕໍ່)
- Inductive: ມໍເຕີ, solenoids, transformers (ສ້າງ back-EMF, ຍາກທີ່ສຸດໃນການຕິດຕໍ່)
- ຄວາມຈຸ: ເຄື່ອງສະໜອງພະລັງງານ, ໄດເວີ LED (ກະແສໄຟຟ້າແຮງສູງ, ຄວາມກົດດັນປານກາງ)
- ໂຫຼດຂອງດອກໄຟ: ເສັ້ນໄຍ Tungsten ມີກະແສໄຟຟ້າແຮງສູງ 10-15 ເທົ່າເນື່ອງຈາກຄວາມຕ້ານທານເຢັນ
ຕົວຢ່າງ: ມໍເຕີແບບ Single-Phase ຂະໜາດ 1HP, 220V:
- ກະແສໄຟຟ້າແລ່ນ: ~6.8A (ຈາກແຜ່ນປ້າຍຊື່)
- ກະແສໄຟຟ້າແຮງສູງ: 6.8A × 6 = ~40A ເປັນເວລາ 100ms
- ດັ່ງນັ້ນ, ທ່ານຕ້ອງການ Relay ທີ່ມີອັດຕາ ≥10A ຢ່າງຕໍ່ເນື່ອງ ແລະ ສາມາດຮອງຮັບກະແສໄຟຟ້າແຮງສູງ 40A ໄດ້
ຂັ້ນຕອນທີ 2: ເລືອກອັດຕາການຈັດອັນດັບກະແສໄຟຟ້າຂອງໜ້າສຳຜັດ (ດ້ວຍຂອບເຂດຄວາມປອດໄພ)
ກົດລະບຽບທອງ: ຫຼຸດລົງຢ່າງໜ້ອຍ 50% ເພື່ອອາຍຸການໃຊ້ງານທີ່ຍາວນານ
ຖ້າໂຫຼດຂອງທ່ານດຶງກະແສໄຟຟ້າ 10A ຢ່າງຕໍ່ເນື່ອງ:
- ຜິດ: ເລືອກ Relay 10A (ຈະລົ້ມເຫຼວໄວເກີນໄປ)
- ຖືກ: ເລືອກ Relay 20A (ໜ້າສຳຜັດຈະມີອາຍຸການໃຊ້ງານຕາມທີ່ໄດ້ຈັດອັນດັບໄວ້)
ເປັນຫຍັງຈຶ່ງຫຼຸດລົງ?
- ອັດຕາການຈັດອັນດັບຂອງໜ້າສຳຜັດສົມມຸດວ່າສະພາບທີ່ເໝາະສົມ (ອຸນຫະພູມສະເພາະ, ລະດັບຄວາມສູງ, ຄວາມຖີ່ຂອງການປ່ຽນ)
- ສະພາບຕົວຈິງເຮັດໃຫ້ປະສິດທິພາບຫຼຸດລົງ
- ການຫຼຸດລົງເຮັດໃຫ້ອາຍຸການໃຊ້ງານຂອງໜ້າສຳຜັດເພີ່ມຂຶ້ນຈາກ 100,000 ຮອບວຽນເປັນ 500,000+ ຮອບວຽນ
Pro-Tip : ໃຫ້ຄວາມສົນໃຈກັບ ອັດຕາການຈັດອັນດັບ AC ທຽບກັບ DC—ພວກມັນແຕກຕ່າງກັນຢ່າງຫຼວງຫຼາຍ! Relay ທີ່ໄດ້ຮັບການຈັດອັນດັບ “10A ທີ່ 250V AC” ອາດຈະຮອງຮັບພຽງແຕ່ “5A ທີ່ 30V DC.” ເປັນຫຍັງ? ກະແສໄຟຟ້າ AC ຜ່ານສູນໂດຍທໍາມະຊາດ 100-120 ຄັ້ງຕໍ່ວິນາທີ, ເຮັດໃຫ້ເກີດການດັບໄຟ. ກະແສໄຟຟ້າ DC ຮັກສາໄຟຟ້າຢ່າງຕໍ່ເນື່ອງ, ເຮັດໃຫ້ເກີດການເຊາະເຈື່ອນຂອງໜ້າສຳຜັດຢ່າງຮ້າຍແຮງ. ກວດເບິ່ງທັງສອງອັດຕາການຈັດອັນດັບສະເໝີ.
ຂັ້ນຕອນທີ 3: ກວດສອບອັດຕາການຈັດອັນດັບແຮງດັນໄຟຟ້າ
ກົດ: ເລືອກ Relay ທີ່ໄດ້ຮັບການຈັດອັນດັບ ≥150% ຂອງແຮງດັນໄຟຟ້າສະໜອງຂອງທ່ານ
- ສໍາລັບໂຫຼດ 120V AC → Relay ຂັ້ນຕ່ຳ 180V (ໃຊ້ 250V)
- ສໍາລັບໂຫຼດ 220V AC → Relay ຂັ້ນຕ່ຳ 330V (ໃຊ້ 400V)
- ສໍາລັບໂຫຼດ 24V DC → Relay ຂັ້ນຕ່ຳ 36V (ໃຊ້ 50V)
ເປັນຫຍັງຈຶ່ງມີຂອບເຂດຄວາມປອດໄພຫຼາຍ? ແຮງດັນໄຟຟ້າຊົ່ວຄາວຈາກ:
- ຟ້າຜ່າໃສ່ສາຍໄຟຟ້າໃກ້ຄຽງ
- ການເລີ່ມຕົ້ນຂອງມໍເຕີຂະໜາດໃຫຍ່ຢູ່ບ່ອນອື່ນໃນສະຖານທີ່
- ອຸປະກອນເຊື່ອມໂລຫະ ຫຼື ການດໍາເນີນງານກະແສໄຟຟ້າສູງອື່ນໆ
- ສາມາດສ້າງເຫດການແຮງດັນໄຟຟ້າເກີນໄລຍະສັ້ນໆ 50-100% ເໜືອລະດັບປົກກະຕິ
ຂັ້ນຕອນທີ 4: ເລືອກແຮງດັນໄຟຟ້າຄວບຄຸມ (ໃຫ້ກົງກັບຕົວຄວບຄຸມຂອງທ່ານ)
ແຮງດັນໄຟຟ້າຄວບຄຸມທົ່ວໄປ:
- 5V: Arduino, Raspberry Pi, ໄມໂຄຣຄອນໂທລເລີສ່ວນໃຫຍ່
- 3.3V: ໄມໂຄຣຄອນໂທລເລີໃໝ່ບາງອັນ, ອຸປະກອນ IoT (ກວດສອບຄວາມເຂົ້າກັນໄດ້!)
- 12V: ລະບົບລົດຍົນ, PLCs ອຸດສາຫະກໍາ, ລະບົບທີ່ໃຊ້ພະລັງງານຈາກແບັດເຕີຣີ
- 24V: ມາດຕະຖານອຸດສາຫະກໍາ (PLCs, ອຸປະກອນອັດຕະໂນມັດ)
ກວດສອບທີ່ສໍາຄັນ: ໄມໂຄຣຄອນໂທລເລີຂອງທ່ານສາມາດ ແຫຼ່ງ ກະແສໄຟຟ້າພຽງພໍບໍ?
ປົກກະຕິແລ້ວ Relay Coil ດຶງ 50-200mA
ເຂັມ Arduino: ສູງສຸດ 40mA (ບໍ່ພຽງພໍສໍາລັບການຂັບໂດຍກົງ!)
ການແກ້ໄຂ: ໃຊ້ໂມດູນ Relay ທີ່ມີວົງຈອນໄດເວີ Transistor (ໂມດູນການຄ້າສ່ວນໃຫຍ່ປະກອບມີສິ່ງນີ້)
ຂັ້ນຕອນທີ 5: ກໍານົດຈໍານວນຊ່ອງ
ທ່ານຕ້ອງການຄວບຄຸມໂຫຼດທີ່ເປັນເອກະລາດຈັກອັນ?
- ຊ່ອງດຽວ: ໜຶ່ງໂຫຼດ (ງ່າຍດາຍທີ່ສຸດ, ຄ່າໃຊ້ຈ່າຍຕ່ຳສຸດ)
- 2/4 ຊ່ອງ: ຫຼາຍໂຫຼດ, ປະສິດທິພາບດ້ານພື້ນທີ່
- 8/16 ຊ່ອງ: ລະບົບອັດຕະໂນມັດ, ແຜງຄວບຄຸມ
ຂໍ້ຄວນພິຈາລະນາ: ເຖິງແມ່ນວ່າທ່ານຕ້ອງການພຽງແຕ່ 3 Relay ໃນຕອນນີ້, ການຊື້ໂມດູນ 4 ຊ່ອງອາດຈະມີປະສິດທິພາບດ້ານຄ່າໃຊ້ຈ່າຍຫຼາຍກວ່າສາມອັນດຽວ, ແລະໃຫ້ຄວາມສາມາດໃນການຂະຫຍາຍຕົວ.
ຂັ້ນຕອນທີ 6: ເລືອກຄຸນສົມບັດພິເສດ (ຖ້າຕ້ອງການ)
- Opto-isolation: ສ້າງສິ່ງກີດຂວາງທາງແສງລະຫວ່າງດ້ານຄວບຄຸມ ແລະ ດ້ານພະລັງງານ
- ຈໍາເປັນສໍາລັບ: ສະພາບແວດລ້ອມອຸດສາຫະກໍາທີ່ມີສຽງດັງ, ລະບົບທີ່ສໍາຄັນຕໍ່ຄວາມປອດໄພ, ສາຍເຄເບີຍາວ
- ເພີ່ມ 1-5% ຕໍ່ຊ່ອງແຕ່ໃຫ້ພູມຕ້ານທານສຽງທີ່ດີກວ່າ
- ໄຟ LED ຊີ້ບອກ: ການຢືນຢັນສາຍຕາຂອງລັດ relay
- ລ້ຳຄ່າສຳລັບການແກ້ໄຂບັນຫາ
- ມາດຕະຖານໃນໂມດູນທີ່ມີຄຸນນະພາບສ່ວນໃຫຍ່
- ຮູບແບບການຕິດຕັ້ງ:
- ຕິດຕັ້ງ PCB: ການຕິດຕັ້ງຖາວອນ, ການພັດທະນາຜະລິດຕະພັນ
- ຕິດຕັ້ງ DIN rail: ຕູ້ອຸດສາຫະກໍາ, ເຂົ້າເຖິງການບໍາລຸງຮັກສາງ່າຍ
- ຕິດຕັ້ງ Socket: Relay ແບບສຽບ, ຄວາມສາມາດໃນການປ່ຽນແທນໄດ້ໄວ
ຄວາມຜິດພາດທົ່ວໄປຂອງໂມດູນ Relay ທີ່ຈະເຮັດໃຫ້ທ່ານເສຍເງິນ (ແລະວິທີການຫຼີກເວັ້ນພວກມັນ)
ຄວາມຜິດພາດທີ 1: ການບໍ່ສົນໃຈກະແສໄຟຟ້າ Inrush
ສະຖານະການ: ທ່ານກໍານົດ relay ສໍາລັບມໍເຕີ 5A ໂດຍອີງໃສ່ກະແສໄຟຟ້າແລ່ນຂອງແຜ່ນປ້າຍຊື່. ໜ້າສຳຜັດ relay ຕິດກັນຫຼັງຈາກ 2 ອາທິດ.
ຄວາມເປັນຈິງ: ກະແສໄຟຟ້າ Inrush ຂອງມໍເຕີແມ່ນ 30A ສໍາລັບ 100ms ໃນເວລາເລີ່ມຕົ້ນ. ໜ້າສຳຜັດບໍ່ໄດ້ຖືກຈັດອັນດັບສໍາລັບການເພີ່ມຂຶ້ນນີ້.
ການແກ້ໄຂ: ສະເຫມີຄູນມໍເຕີ FLA (Full Load Amps) ດ້ວຍ 6-8 ສໍາລັບກະແສໄຟຟ້າ inrush, ແລະເລືອກ relay ທີ່ຖືກຈັດອັນດັບສໍາລັບຈຸດສູງສຸດນີ້—ຫຼືໃຊ້ ວົງຈອນ soft-start ເພື່ອຈໍາກັດ inrush.
ຄວາມຜິດພາດທີ 2: ການໃຊ້ຄ່າ DC ສໍາລັບການໂຫຼດ AC (ຫຼືໃນທາງກັບກັນ)
ສະຖານະການ: Relay “10A” ຂອງທ່ານລົ້ມເຫລວໃນການຄວບຄຸມ solenoid DC 5A.
ຄວາມເປັນຈິງ: ຄ່າ 10A ແມ່ນສໍາລັບ AC ເທົ່ານັ້ນ. ຄ່າ DC ແມ່ນ 3A.
ການແກ້ໄຂ: ກວດເບິ່ງ datasheet ສໍາລັບທັງຄ່າ AC ແລະ DC. ພວກເຂົາສາມາດແຕກຕ່າງກັນໄດ້ 50-200%.
ຄວາມຜິດພາດທີ 3: ບໍ່ມີການປ້ອງກັນ Flyback Diode
ສະຖານະການ: Arduino ຂອງທ່ານຣີເຊັດແບບສຸ່ມ ຫຼືຢຸດການຕອບສະໜອງຫຼັງຈາກເປີດໃຊ້ relays.
ຄວາມເປັນຈິງ: ແຮງດັນໄຟຟ້າ Flyback ຈາກການ de-energization ຂອງ coil relay ກໍາລັງທໍາລາຍ microcontroller ຫຼືທໍາລາຍ pins output.
ການແກ້ໄຂ: ສະເຫມີໃຊ້ໂມດູນ relay ທີ່ມີ diodes flyback ລວມ. ຖ້າທ່ານຕ້ອງໃຊ້ relay ເປົ່າ, ໃຫ້ເພີ່ມ diode 1N4007 ຂ້າມ coil (cathode ໄປຫາບວກ).
ຄວາມຜິດພາດທີ 4: Undersizing Wire Gauge
ສະຖານະການ: Relay ທີ່ຖືກຈັດອັນດັບຢ່າງຖືກຕ້ອງຂອງທ່ານຍັງລົ້ມເຫລວຫຼືເຮັດໃຫ້ເກີດບັນຫາການຫຼຸດແຮງດັນ.
ຄວາມເປັນຈິງ: ທ່ານໃຊ້ສາຍ 22 AWG ສໍາລັບການໂຫຼດ 15A. ສາຍແມ່ນຄໍຂວດ.
ການແກ້ໄຂ: ປະຕິບັດຕາມຕາຕະລາງ ampacity ສາຍ:
- ການໂຫຼດ 10A → 18 AWG ຂັ້ນຕ່ຳ
- ການໂຫຼດ 15A → 14 AWG ຂັ້ນຕ່ຳ
- ການໂຫຼດ 20A → 12 AWG ຂັ້ນຕ່ຳ
ຄວາມຜິດພາດທີ 5: ການລະເລີຍວັດສະດຸຕິດຕໍ່ສໍາລັບຄໍາຮ້ອງສະຫມັກຂອງທ່ານ
ຄວາມເປັນຈິງ: ບໍ່ແມ່ນໜ້າສຳຜັດ relay ທັງໝົດແມ່ນເທົ່າທຽມກັນ:
- Silver-cadmium oxide: ຈຸດປະສົງທົ່ວໄປ, ດີສໍາລັບການໂຫຼດສ່ວນໃຫຍ່
- Silver-tin oxide: ການໂຫຼດມໍເຕີ, ຄວາມທົນທານຕໍ່ inrush ສູງ
- ຄໍາ: ການປ່ຽນສັນຍານພະລັງງານຕ່ໍາ (milliamps), ບໍ່ແມ່ນສໍາລັບການໂຫຼດພະລັງງານ
ການແກ້ໄຂ: ຈັບຄູ່ວັດສະດຸຕິດຕໍ່ກັບປະເພດການໂຫຼດ—ກວດເບິ່ງຂໍ້ກໍານົດ datasheet.
ຕົວຢ່າງການນໍາໃຊ້ໃນໂລກທີ່ແທ້ຈິງ
ຕົວຢ່າງທີ 1: ການຄວບຄຸມແສງສະຫວ່າງເຮືອນອັດສະລິຍະ
ສິ່ງທ້າທາຍ: ຄວບຄຸມໄຟເຮືອນ 8 ດວງ (120V AC, 60W ແຕ່ລະດວງ) ດ້ວຍ Raspberry Pi (3.3V GPIO).
ການແກ້ໄຂ:
- ໂມດູນ relay 8 ຊ່ອງ 5V ທີ່ມີ opto-isolation
- ແຕ່ລະຊ່ອງຖືກຈັດອັນດັບສໍາລັບ 10A ທີ່ 250V AC (60W ÷ 120V = 0.5A, ຂອບຄວາມປອດໄພຂະຫນາດໃຫຍ່)
- ການໂຫຼດ resistive (incandescent) = ງ່າຍຕໍ່ການຕິດຕໍ່
- ຄ່າໃຊ້ຈ່າຍທັງໝົດ: ~20 ໂດລາສໍາລັບໂມດູນ
ຕົວຢ່າງທີ 2: ການຄວບຄຸມມໍເຕີສາຍພານອຸດສາຫະກໍາ
ສິ່ງທ້າທາຍ: ເລີ່ມ/ຢຸດມໍເຕີສາມເຟດ 2HP, 220V ດ້ວຍ PLC (ຜົນຜະລິດ 24V DC).
ການແກ້ໄຂ:
- ໂມດູນ relay ອຸດສາຫະກໍາ 24V ຊ່ອງດຽວ, ຕິດຕັ້ງ DIN rail
- ຄ່າຕິດຕໍ່: 25A ທີ່ 480V AC (ມໍເຕີດຶງ 8A ແລ່ນ, 48A inrush)
- ໜ້າສຳຜັດ Silver-tin oxide ສໍາລັບໜ້າທີ່ມໍເຕີ
- ຕົວຊີ້ບອກ LED ໃນຕົວສໍາລັບການເບິ່ງເຫັນການບໍາລຸງຮັກສາ
- ຄ່າໃຊ້ຈ່າຍ: ~45 ໂດລາ, ແຕ່ປ້ອງກັນເຫດການຢຸດເຮັດວຽກ 5,000+ ໂດລາ
ຕົວຢ່າງທີ 3: ລະບົບຊົນລະປະທານ Arduino
ສິ່ງທ້າທາຍ: ຄວບຄຸມ 4 solenoid valves (24V AC, 0.5A ແຕ່ລະອັນ) ດ້ວຍ Arduino (5V).
ການແກ້ໄຂ:
- ໂມດູນ relay 5V 4 ຊ່ອງ
- ຄ່າ 10A ຕໍ່ຊ່ອງ (ຂອບຄວາມປອດໄພຂະຫນາດໃຫຍ່ສໍາລັບ valves 0.5A)
- ຄ່າໃຊ້ຈ່າຍ: ~8 ໂດລາ
- 关键: ແຕ່ລະ solenoid ແມ່ນການໂຫຼດ inductive, ດັ່ງນັ້ນ diodes flyback ໃນໂມດູນແມ່ນມີຄວາມຈໍາເປັນ
ສະຫຼຸບ: Checklist ສະເພາະໂມດູນ Relay ຂອງທ່ານ
ໂມດູນ relay ແມ່ນຂົວທີ່ຈໍາເປັນຂອງທ່ານລະຫວ່າງຄວາມສະຫຼາດໃນການຄວບຄຸມພະລັງງານຕ່ໍາແລະການປະຕິບັດໃນໂລກທີ່ແທ້ຈິງທີ່ມີພະລັງງານສູງ. ໂດຍການປະຕິບັດຕາມວິທີການທີ່ເປັນລະບົບນີ້, ທ່ານຈະກໍານົດໂມດູນທີ່ຖືກຕ້ອງທຸກຄັ້ງ:
ກ່ອນທີ່ທ່ານຈະຊື້:
- ຄິດໄລ່ທັງກະແສໄຟຟ້າແລ່ນແລະ inrush ສໍາລັບການໂຫຼດຂອງທ່ານ
- ກວດສອບວ່າຄ່າ AC ທຽບກັບ DC ກົງກັບການນຳໃຊ້ຂອງທ່ານ
- ຫຼຸດຄ່າການຈັດອັນດັບຂອງໜ້າສຳຜັດລົງ 50% ເພື່ອໃຫ້ມີອາຍຸການນຳໃຊ້ຍາວນານ
- ຢືນຢັນວ່າແຮງດັນໄຟຟ້າຄວບຄຸມກົງກັບ microcontroller ຂອງທ່ານ
- ກວດສອບ diode flyback ແລະການປ້ອງກັນ optocoupler
- ເລືອກຮູບແບບການຕິດຕັ້ງທີ່ເໝາະສົມສຳລັບການຕິດຕັ້ງຂອງທ່ານ
- ພິຈາລະນາຄວາມຕ້ອງການໃນການຂະຫຍາຍໃນອະນາຄົດ (ຊ່ອງເພີ່ມເຕີມ)
ບົດສະຫຼຸບທີ່ສໍາຄັນ:
- ການແຍກແມ່ນທຸກສິ່ງທຸກຢ່າງ: ຢ່າປະນີປະນອມຕໍ່ການແຍກທາງກາຍະພາບ/ແສງລະຫວ່າງການຄວບຄຸມ ແລະ ພະລັງງານ
- ກະແສໄຟຟ້າຂ້າໜ້າສຳຜັດ: ການປະເມີນຄວາມສາມາດໃນການຮັບກະແສໄຟຟ້າຕໍ່າເກີນໄປແມ່ນສາເຫດຕົ້ນຕໍຂອງການເສຍຫາຍຂອງ relay ກ່ອນກຳນົດ
- ການປ້ອງກັນບໍ່ແມ່ນທາງເລືອກ: ໄດໂອດ Flyback ຊ່ວຍປະຢັດ microcontroller ຂອງທ່ານ; ການຟິວທີ່ເໝາະສົມຊ່ວຍປະຢັດສະຖານທີ່ຂອງທ່ານ
- ຈັບຄູ່ເຄື່ອງມືກັບວຽກ: EMRs ສໍາລັບພະລັງງານ, SSRs ສໍາລັບຄວາມໄວ, opto-isolation ສໍາລັບພູມຕ້ານທານສຽງ
ຂັ້ນຕອນຕໍ່ໄປຂອງທ່ານ: ກ່ອນທີ່ທ່ານຈະຄລິກ “ເພີ່ມໃສ່ກະຕ່າ,” ດຶງເອກະສານຂໍ້ມູນອອກ ແລະກວດສອບທຸກຂໍ້ກໍານົດສະເພາະກັບຄວາມຕ້ອງການໂຫຼດຕົວຈິງຂອງທ່ານ. 10 ນາທີທີ່ທ່ານໃຊ້ໃນຕອນນີ້ຈະຊ່ວຍປະຢັດເວລາໃນການແກ້ໄຂບັນຫາ ແລະ ເງິນຫຼາຍຮ້ອຍໂດລາໃນອຸປະກອນທີ່ຖືກເຜົາ.
ມີຄໍາຖາມກ່ຽວກັບຄໍາຮ້ອງສະຫມັກໂມດູນ relay ສະເພາະບໍ? ຮູບແບບຄວາມລົ້ມເຫຼວທົ່ວໄປທີ່ສຸດແມ່ນການເລືອກໂດຍອີງໃສ່ແຮງດັນໄຟຟ້າຢ່າງດຽວໃນຂະນະທີ່ບໍ່ສົນໃຈຄວາມສາມາດໃນການຮັບກະແສໄຟຟ້າ ແລະປະເພດການໂຫຼດ—ຢ່າປ່ອຍໃຫ້ສິ່ງນີ້ເປັນບົດຮຽນລາຄາແພງທີ່ໄດ້ຮຽນຮູ້.
