
Risposta diretta
La classe di intervento è un sistema di valutazione standardizzato definito dalle norme IEC 60947-4-1 e NEMA che specifica il tempo massimo che un dispositivo di protezione del motore (relè di sovraccarico termico o interruttore automatico di protezione del motore) impiegherà per intervenire e scollegare un motore quando sottoposto a 600% (o 7,2×) della sua corrente nominale. Il numero di classe indica direttamente il tempo massimo di intervento in secondi: la Classe 10 interviene entro 10 secondi, la Classe 20 entro 20 secondi e la Classe 30 entro 30 secondi a questo livello di sovraccarico. Questa classificazione garantisce che il tempo di risposta del dispositivo di protezione corrisponda alla curva di danno termico del motore, prevenendo il guasto dell'isolamento degli avvolgimenti ed evitando interventi intempestivi durante le normali condizioni di avviamento.
Punti di forza
- ✅ Definizione della classe di intervento: Il numero di classe (5, 10, 10A, 20, 30) rappresenta i secondi massimi per l'intervento a 600% (NEMA) o 7,2× (IEC) dell'impostazione di corrente del relè, garantendo che la protezione sia allineata con i limiti termici del motore
- ✅ Standard NEMA vs. IEC: I motori NEMA richiedono tipicamente una protezione di Classe 20 (progettati per un fattore di servizio di 1,15 e una robusta capacità termica), mentre i motori IEC richiedono la Classe 10 (con fattore di servizio di 1,0 e margini termici più ristretti)
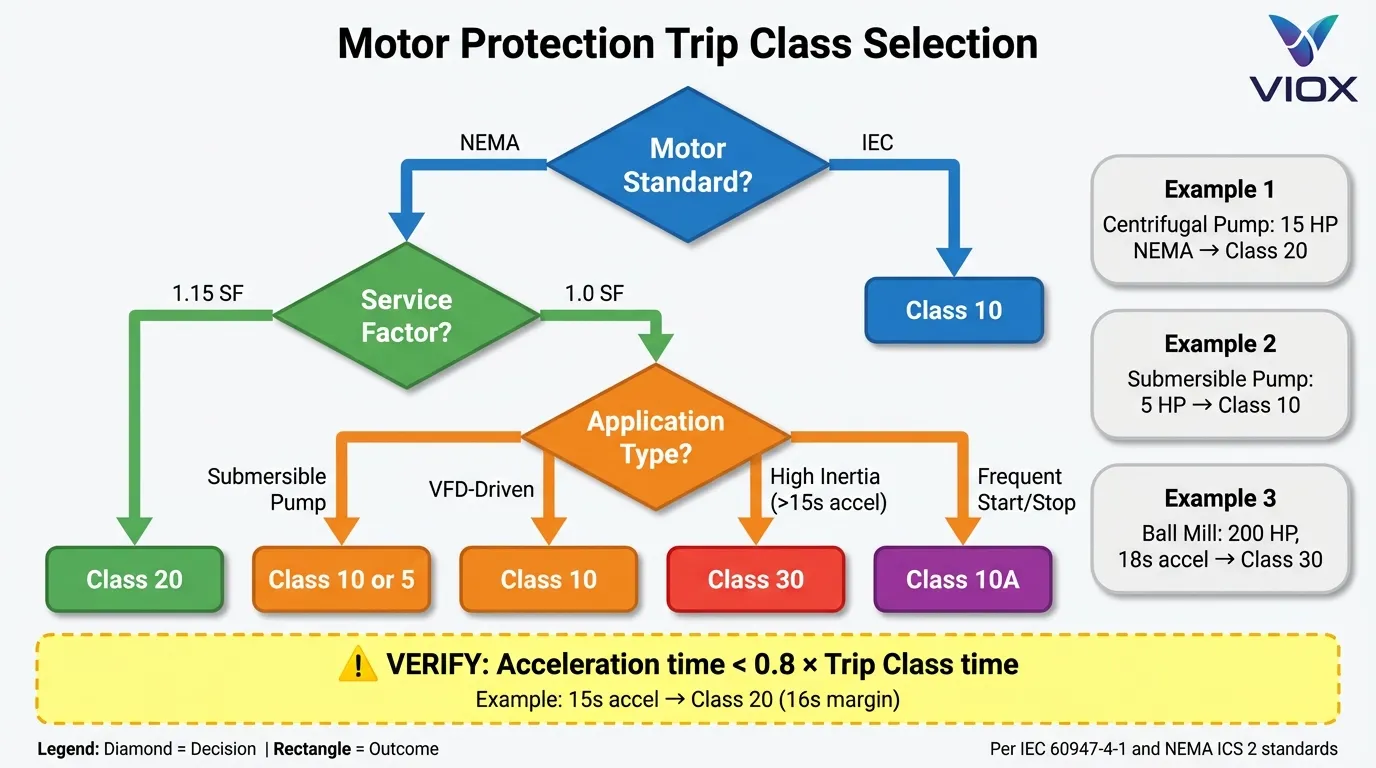
- ✅ Criteri di selezione: Scegliere la Classe 10 per applicazioni a risposta rapida (pompe sommergibili, motori ermeticamente sigillati, motori pilotati da VFD), la Classe 20 per motori NEMA per impieghi generali e la Classe 30 per carichi ad alta inerzia che richiedono tempi di accelerazione prolungati
- ✅ Corrispondenza della curva di danno termico: La classe di intervento deve essere allineata con la capacità di resistenza termica del motore: una protezione non corrispondente può causare guasti prematuri (sottoprotezione) o interventi intempestivi (sovraprotezione)
- ✅ Comportamento di avviamento a freddo vs. a caldo: Le curve di intervento tengono conto sia delle condizioni di avviamento a freddo (motore a temperatura ambiente, tempi di intervento più lunghi accettabili) sia degli scenari di riavvio a caldo (motore vicino alla temperatura di esercizio, protezione più rapida richiesta)
Comprensione della classe di intervento: le fondamenta della protezione del motore
Cosa significa realmente la classe di intervento
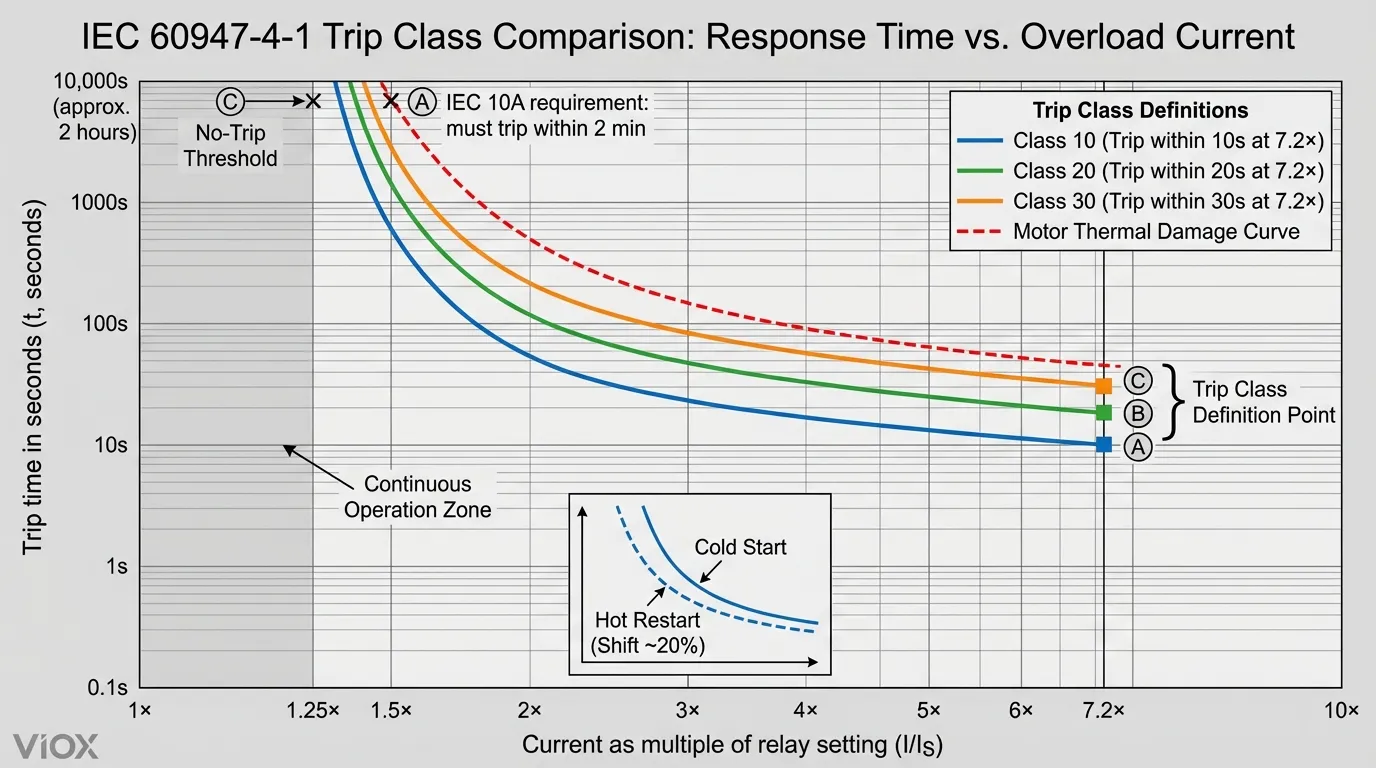
La classe di intervento non è semplicemente una specifica temporale, ma rappresenta una correlazione attentamente progettata tra le caratteristiche di risposta del dispositivo di protezione e la capacità del motore di resistere allo stress termico. Secondo la norma IEC 60947-4-1, la classe di intervento definisce due punti operativi critici che stabiliscono la curva di protezione completa:
Punto di definizione primario (corrente elevata):
- Standard NEMA: Intervento entro il tempo di classe (secondi) a 600% dell'impostazione del relè
- Norma IEC: Intervento entro il tempo di classe (secondi) a 7,2× l'impostazione del relè
Punto di definizione secondario (sovraccarico moderato):
- A 125% dell'impostazione: NON deve intervenire entro 2 ore (avviamento a freddo)
- A 150% dell'impostazione: Deve intervenire entro un tempo specifico in base alla classe (IEC 10A: <2 minuti)
Questa definizione a due punti crea una curva caratteristica a tempo inverso che rispecchia il profilo di danno termico del motore: maggiore è il sovraccarico, più rapida è la risposta di intervento.
La fisica alla base della selezione della classe di intervento
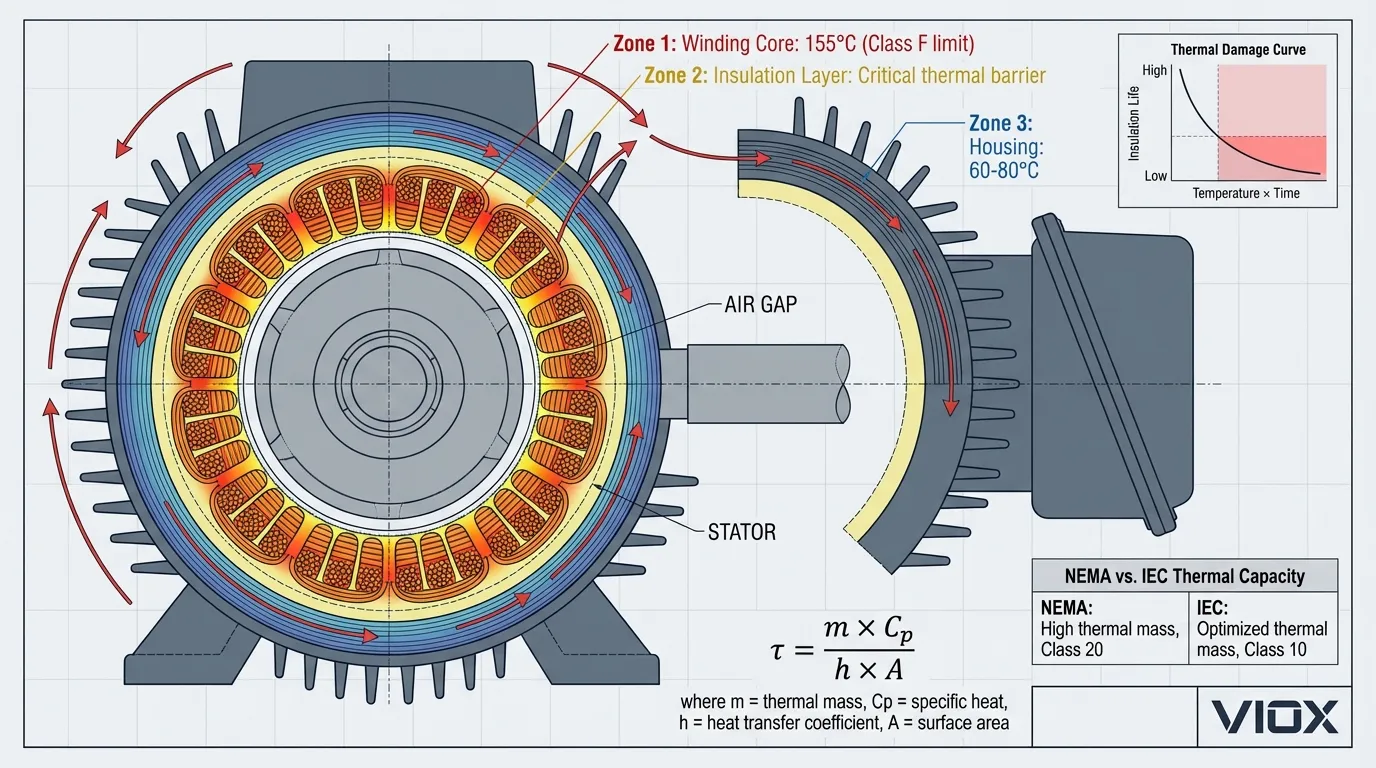
L'isolamento degli avvolgimenti del motore segue la “regola dei 10 gradi”: per ogni aumento di 10°C al di sopra della temperatura nominale, la durata dell'isolamento si dimezza. Durante le condizioni di sovraccarico, il riscaldamento I2R negli avvolgimenti aumenta esponenzialmente con la corrente. La classe di intervento deve garantire che il dispositivo di protezione interrompa l'alimentazione prima che l'energia termica accumulata (∫ I²·t dt) superi la capacità di resistenza termica del motore.
Relazione della costante di tempo termica:
τmotore > τrelè × Margine di sicurezza
Dove:
- τmotore = Costante di tempo termica del motore (tipicamente 30-60 minuti per motori chiusi)
- τrelè = Costante di tempo termica del relè (varia in base alla classe)
- Margine di sicurezza = Tipicamente 1,2-1,5× per tenere conto delle variazioni ambientali
Classi di intervento standard: confronto completo
Classi di intervento IEC 60947-4-1
| Classe di intervento | Tempo di intervento a 7,2× Ir | Applicazioni Tipiche | Compatibilità del tipo di motore |
|---|---|---|---|
| Classe 5 | ≤5 secondi | Protezione estremamente rapida per motori termicamente sensibili | Compressori ermeticamente sigillati, piccole pompe sommergibili |
| Classe 10 | ≤10 secondi | Motori IEC standard, applicazioni VFD | Motori IEC Design N, motori raffreddati artificialmente, carichi a risposta rapida |
| Classe 10A | ≤10 secondi a 7,2× ≤2 minuti a 1,5× |
Protezione migliorata per condizioni di riavvio a caldo | Motori IEC con cicli di avvio/arresto frequenti |
| Classe 20 | ≤20 secondi | Motori NEMA per impieghi generali | Motori NEMA Design A/B con 1,15 SF, applicazioni industriali standard |
| Classe 30 | ≤30 secondi | Carichi ad alta inerzia, accelerazione prolungata | Motori per impieghi gravosi, frantoi, grandi ventilatori, centrifughe |
Standard NEMA per la classe di intervento
Gli standard NEMA sono allineati con le definizioni IEC ma utilizzano 600% (6×) invece di 7,2× come punto di riferimento. La differenza pratica è trascurabile: entrambi i sistemi producono curve di protezione equivalenti.
Considerazioni chiave specifiche per NEMA:
- Dominanza Classe 20: Circa l'85% dei motori NEMA sono progettati per la protezione di Classe 20 grazie al fattore di servizio standardizzato di 1.15 e al design termico robusto
- Tempo di Rotore Bloccato: NEMA MG-1 richiede che i motori ≤500 HP resistano alla corrente di rotore bloccato per ≥12 secondi alla normale temperatura di esercizio, in linea con la protezione di Classe 20
- Interazione del Fattore di Servizio: I motori con SF 1.15 possono gestire un sovraccarico continuo del 115%, richiedendo curve di intervento che non interferiscano con questa capacità
Guida alla Selezione della Classe di Intervento: Abbinare la Protezione all'Applicazione
Matrice Decisionale: Di Quale Classe di Intervento Hai Bisogno?
| Caratteristica del Motore | Classe di Intervento Raccomandata | Motivazione |
|---|---|---|
| NEMA Design A/B, 1.15 SF | Classe 20 | Capacità termica standard, resistenza al rotore bloccato di 12-20 secondi |
| IEC Design N, 1.0 SF | Classe 10 | Valutato per l'applicazione, margini termici più stretti, resistenza al rotore bloccato di 10 secondi |
| Motori per pompe sommergibili | Classe 10 o Classe 5 | Raffreddato a liquido, rapido aumento termico quando il flusso si interrompe |
| Motori pilotati da VFD | Classe 10 | Raffreddamento ridotto a basse velocità, nessun fattore di servizio quando alimentato da inverter |
| Carichi ad alta inerzia (>5 secondi di accelerazione) | Classe 30 | Tempo di avviamento prolungato, previene interventi intempestivi |
| Avvio/arresto frequente (>10 cicli/ora) | Classe 10A | Protezione al riavvio a caldo, intervento di 2 minuti al 150% |
| Motori ermeticamente sigillati | Classe 5 o Classe 10 | Nessun raffreddamento esterno, rapido aumento di temperatura |
Scenari di Applicazione Critici
Scenario 1: Pompa Centrifuga con Motore NEMA da 15 HP
Specifiche del Motore:
- Corrente a Pieno Carico (FLA): 20A
- Fattore di Servizio: 1.15
- Corrente di Rotore Bloccato: 120A (6× FLA)
- Tempo di Accelerazione: 3 secondi
Analisi:
- Durata del rotore bloccato (3s) < Tempo di intervento Classe 20 (20s) → ✅ Nessun intervento intempestivo
- Motore NEMA Design B → Standard Classe 20
- 1.15 SF consente 23A continui senza intervento
Selezione: Relè di sovraccarico termico Classe 20, impostato a 20A
Scenario 2: Pompa per Pozzo Sommergibile con Motore da 5 HP
Specifiche del Motore:
- Corrente a Pieno Carico: 14A
- Fattore di Servizio: 1.0 (nessun SF per sommergibile)
- Corrente di Rotore Bloccato: 84A (6× FLA)
- Raffreddamento: Dipendente dal flusso d'acqua
Analisi:
- Perdita di flusso d'acqua = surriscaldamento rapido (nessun raffreddamento esterno)
- Richiede una protezione rapida per prevenire bruciature
- Il produttore specifica la protezione di Classe 10
Selezione: Relè di sovraccarico termico Classe 10, impostato a 14A
Scenario 3: Mulino a Sfere con Motore da 200 HP (Alta Inerzia)
Specifiche del Motore:
- Corrente a Pieno Carico: 240A
- Tempo di Accelerazione: 18 secondi
- Corrente di Rotore Bloccato: 1.440A (6× FLA)
- Tipo di Carico: Alta inerzia, costante di tempo meccanica >10s
Analisi:
- Tempo di accelerazione (18s) > Tempo di intervento Classe 20 (20s) → ⚠️ Marginale
- Tempo di accelerazione (18s) < Tempo di intervento Classe 30 (30s) → ✅ Margine di sicurezza
- L'alta inerzia richiede una tolleranza di avviamento estesa
Selezione: Relè di sovraccarico termico Classe 30, impostato a 240A
Protezione Motori NEMA vs. IEC: Comprendere le Differenze Fondamentali
Confronto della Filosofia di Progettazione
| Aspetto | Motori NEMA | Motori IEC |
|---|---|---|
| Approccio di Progettazione | Conservativo, sovradimensionato per versatilità | Specifico per l'applicazione, ottimizzato per il servizio esatto |
| Fattore di Servizio | Tipicamente 1.15 (capacità di sovraccarico continuo del 150%) | Tipicamente 1.0 (nessun margine di sovraccarico) |
| Capacità termica | Elevata massa termica, sistemi di isolamento robusti | Design termico ottimizzato, capacità in eccesso minima |
| Classe di intervento standard | Classe 20 (20 secondi a 600% FLA) | Classe 10 (10 secondi a 7.2× Ir) |
| Resistenza al rotore bloccato | ≥12 secondi (NEMA MG-1 per ≤500 HP) | ~10 secondi (IEC 60034-12) |
| Classe di isolamento | Tipicamente Classe F (155°C) con aumento di Classe B | Tipicamente Classe F con aumento di Classe F |
| Corrente di partenza | 6-7× FLA (NEMA Design B) | 5-8× In (IEC Design N) |
Perché i motori IEC richiedono una protezione più rapida
I motori IEC sono progettati con margini termici più stretti perché sono progettati per applicazioni specifiche piuttosto che per un uso generico. Questa filosofia di “valutazione dell'applicazione” significa:
- Nessun buffer del fattore di servizio: Un motore IEC con una potenza nominale di 10 kW eroga esattamente 10 kW in modo continuo, senza un margine di sovraccarico del 150% come i motori NEMA 1.15 SF
- Raffreddamento ottimizzato: I sistemi di raffreddamento sono dimensionati con precisione per il carico nominale, non sovradimensionati
- Risposta termica più rapida: Una massa termica inferiore significa che la temperatura aumenta più rapidamente durante il sovraccarico
- Standard globali di efficienza: I requisiti di efficienza IEC IE3/IE4 guidano progetti termici più rigorosi
Implicazione pratica: L'utilizzo di un relè di Classe 20 su un motore IEC può consentire 10-20 secondi di sovraccarico dannoso prima dello scatto, superando potenzialmente il limite termico di 10 secondi del motore.
Avvio a freddo vs. Riavvio a caldo: la complessità nascosta
Impatto dello stato termico sul comportamento di intervento
Le specifiche della classe di intervento si basano su condizioni di avvio a freddo—il motore e il dispositivo di protezione sono entrambi a temperatura ambiente. Tuttavia, le applicazioni del mondo reale comportano riavvii a caldo dopo un recente funzionamento, modificando fondamentalmente le dinamiche di protezione.
Caratteristiche di avvio a freddo:
- Avvolgimenti del motore a temperatura ambiente (~40°C)
- Piena capacità termica disponibile
- Durata di sovraccarico accettabile più lunga
- La curva di intervento segue le specifiche pubblicate
Caratteristiche di riavvio a caldo:
- Avvolgimenti del motore vicino alla temperatura di esercizio (~120-155°C)
- Capacità termica ridotta (già parzialmente “utilizzata”)
- Durata di sovraccarico sicura più breve
- La curva di intervento si sposta a sinistra (intervento più rapido)
IEC Classe 10A: la soluzione di riavvio a caldo
IEC 60947-4-1 definisce la Classe 10A specificamente per affrontare le inadeguatezze della protezione di riavvio a caldo nei relè standard di Classe 10/20. La differenza fondamentale:
| Condizione | Classe 20 standard | IEC Classe 10A |
|---|---|---|
| A 7.2× Ir (freddo) | ≤20 secondi | ≤10 secondi |
| A 1.5× Ir (caldo) | ~8 minuti | ≤2 minuti |
| Applicazione | Scopo generale | Avvio/arresto frequente, servizio ciclico |
Perché questo è importante: Un motore che funziona a pieno carico raggiunge l'equilibrio termico a ~120°C (isolamento di Classe F). Se si interviene per sovraccarico e si riavvia immediatamente, un sovraccarico del 150% può danneggiare l'isolamento entro 2 minuti. I relè standard di Classe 20 potrebbero impiegare 4-8 minuti per intervenire a questo livello, consentendo danni termici. La Classe 10A garantisce la protezione entro 2 minuti.
Interruttori di protezione motore (MPCB) vs. Relè di sovraccarico termico
Confronto tecnologico
| Funzione | Relè di sovraccarico termico (TOR) | Interruttore di protezione motore (MPCB) |
|---|---|---|
| Meccanismo di scatto | Striscia bimetallica o riscaldamento in lega eutettica | Magnetico (istantaneo) + termico (sovraccarico) |
| Disponibilità della classe di intervento | Fisso (specifico del dispositivo) o regolabile (elettronico) | Fisso o regolabile (sganciatori elettronici) |
| Protezione da cortocircuito | ❌ No (richiede interruttore/fusibile separato) | ✅ Sì (sganciatore magnetico integrato) |
| Rilevamento della perdita di fase | ✅ Sì (intrinseco al design trifase) | ✅ Sì (modelli elettronici) |
| Regolabilità | Impostazione della corrente regolabile, classe solitamente fissa | Corrente + classe regolabili (modelli elettronici) |
| Metodo di ripristino | Manuale o automatico | Manuale (meccanismo a scatto libero) |
| Applicazioni Tipiche | Avviatori basati su contattori, applicazioni IEC | Protezione motore stand-alone, ibrido NEMA/IEC |
| Standard | IEC 60947-4-1 (TOR), NEMA ICS 2 | IEC 60947-4-1 (MPSD), IEC 60947-2 (interruttore) |
Quando utilizzare ciascuna tecnologia
Scegliere relè di sovraccarico termico quando:
- Si utilizzano avviatori motore basati su contattori (configurazioni standard IEC/NEMA)
- La protezione da cortocircuito è fornita da un interruttore o fusibili a monte
- Applicazioni sensibili ai costi
- Sostituzione/retrofit in sistemi di contattori esistenti
Scegliere interruttori di protezione motore quando:
- È richiesta una protezione integrata (sovraccarico + cortocircuito) in un singolo dispositivo
- Vincoli di spazio (MPSD più compatto di contattore + TOR + interruttore)
- Avviamento diretto (DOL) senza contattore
- È richiesta una commutazione manuale frequente (l'MPSD ha una funzione di sezionamento integrata)
Errori comuni nella selezione della classe di intervento e soluzioni
Errore 1: Utilizzo della protezione di classe 20 su motori IEC
Sintomo: Il motore si guasta prematuramente, rottura dell'isolamento degli avvolgimenti, nessun intervento
Causa principale: Motore IEC progettato per la protezione di classe 10 (limite termico di 10 secondi) ma protetto da un relè di classe 20 (tempo di intervento di 20 secondi). Il divario di 10 secondi consente danni termici.
Soluzione:
- Verificare sempre il requisito della classe di intervento del produttore del motore (controllare la documentazione o la targhetta del motore)
- Quando si sostituiscono motori NEMA con equivalenti IEC, verificare la compatibilità della classe di intervento
- Utilizzare relè di sovraccarico elettronici con classe di intervento regolabile per flessibilità
Errore 2: Relè di classe 10 che causa interventi intempestivi su motori NEMA
Sintomo: Il motore interviene durante l'avviamento normale, soprattutto con carichi ad alta inerzia
Causa principale: Motore NEMA Design B con tempo di accelerazione di 18 secondi protetto da relè di classe 10 (intervento di 10 secondi). La corrente di rotore bloccato (6× FLA) supera la soglia di intervento prima che il motore raggiunga la piena velocità.
Soluzione:
- Calcolare il tempo di accelerazione effettivo: taccel = (J · ω) / (Tmotore – Tcarico)
- Assicurarsi che: taccel < 0.8 × tclasse di viaggio (margine di sicurezza del 20%)
- Per questo caso: utilizzare un relè di classe 20 o di classe 30
Errore 3: Ignorare le condizioni di riavvio a caldo
Sintomo: Il motore si guasta dopo diversi cicli rapidi di avvio/arresto, anche se la protezione all'avviamento a freddo è corretta
Causa principale: I cicli frequenti mantengono il motore a una temperatura elevata. Il relè standard di classe 20 consente 8 minuti al 150% di sovraccarico (condizione a caldo), ma il motore può sopportare solo 2 minuti.
Soluzione:
- Per applicazioni con >6 avviamenti/ora: utilizzare la protezione IEC di classe 10A
- Implementare ritardi minimi di spegnimento (consentire al motore di raffreddarsi tra gli avviamenti)
- Considerare i relè elettronici basati su modelli termici che tengono traccia della cronologia della temperatura del motore
Errore 4: Sovradimensionamento dell'impostazione della corrente del relè
Sintomo: Il motore funziona continuamente a caldo, eventuale guasto dell'isolamento, il relè non interviene mai
Causa principale: Relè impostato a 25A per un motore da 20A (125% di FLA). Un carico continuo di 23A (115% della FLA del motore) non raggiunge mai la soglia di intervento del relè.
Soluzione:
- Impostare la corrente del relè sulla FLA della targhetta del motore (non sulla corrente del fattore di servizio)
- Per un motore da 20A con 1.15 SF: impostare il relè a 20A, non a 23A
- La curva di intervento del relè al 125% (25A) consentirà comunque il funzionamento del fattore di servizio senza interventi intempestivi
Tecnologia di classe di intervento elettronica vs. termica
Relè termici bimetallici/in lega eutettica
Come funzionano:
- La corrente scorre attraverso l'elemento riscaldante
- La striscia bimetallica si piega a causa della dilatazione termica differenziale
- Il collegamento meccanico fa scattare i contatti del relè quando viene raggiunta la soglia di deflessione
Caratteristiche della classe di intervento:
- Classe di intervento fissa (specifica del dispositivo, non può essere modificata)
- Compensazione della temperatura ambiente (la striscia bimetallica compensa intrinsecamente)
- Memoria termica (mantiene il calore dopo l'intervento, influisce sul tempo di ripristino)
- Precisione della curva di intervento: ±10-20% (tolleranze meccaniche)
Vantaggi:
- Nessuna alimentazione esterna richiesta
- Immune al rumore elettrico/EMI
- Tecnologia semplice e collaudata
- Costo inferiore
Svantaggi:
- Classe di intervento fissa (è necessario avere in stock più tipi di relè)
- Risposta più lenta ai sovraccarichi rapidi
- Usura meccanica nel tempo
- Capacità diagnostica limitata
Relè di sovraccarico elettronici
Come funzionano:
- I trasformatori di corrente (TA) misurano la corrente del motore
- Il microprocessore calcola il modello termico: θ(t) = θ0 + ∫ [(I2 – Ivalutato2) / τ] dt
- Interviene quando la temperatura calcolata supera la soglia
Caratteristiche della classe di intervento:
- Classe di intervento selezionabile (Classe 5, 10, 10A, 15, 20, 30 tramite DIP switch o software)
- Modello termico digitale (traccia continuamente la temperatura del motore)
- Compensazione hot-restart (ricorda lo stato termico dopo l'interruzione di corrente)
- Precisione della curva di intervento: ±5% (precisione digitale)
Vantaggi:
- Un singolo dispositivo copre più classi di intervento (riduce l'inventario)
- Diagnostica avanzata (squilibrio di corrente, perdita di fase, guasto a terra)
- Capacità di comunicazione (Modbus, Profibus, EtherNet/IP)
- Funzioni programmabili (soglie di allarme, ritardo di intervento)
Svantaggi:
- Richiede alimentazione di controllo
- Più complesso (costo iniziale più elevato)
- Sensibile al rumore elettrico (richiede una corretta messa a terra)
- Potrebbe essere necessario aggiornare il firmware
Classe di intervento e coordinamento del motore: Tipo 1 vs. Tipo 2
Tipi di coordinamento IEC 60947-4-1
I sistemi di protezione del motore devono coordinarsi con i dispositivi di protezione da cortocircuito (fusibili o interruttori automatici) per garantire un'interruzione sicura dei guasti. La classe di intervento influisce su questo coordinamento:
Coordinamento di Tipo 1:
- In condizioni di cortocircuito, il contattore o l'avviatore possono subire danni
- Nessun pericolo per persone o installazioni
- Potrebbe essere necessaria la riparazione o la sostituzione prima del riavvio
- Impatto della classe di intervento: Minimo—si concentra sulla protezione da cortocircuito, non da sovraccarico
Coordinamento di Tipo 2:
- In condizioni di cortocircuito, nessun danno al contattore o all'avviatore (eccetto la possibile saldatura dei contatti)
- Nessun pericolo per persone o installazioni
- Apparecchiatura pronta per il servizio dopo l'eliminazione del guasto
- Impatto della classe di intervento: Significativo—il relè di sovraccarico deve intervenire prima che i contatti del contattore si saldino
Esempio di coordinamento:
| FLA del motore | Classe di intervento | Fusibile a monte | Tipo di coordinamento | Corrente di guasto massima |
|---|---|---|---|---|
| 32A | Classe 10 | Fusibile gG da 63A | Tipo 2 | 50 kA |
| 32A | Classe 20 | Fusibile gG da 63A | Tipo 2 | 50 kA |
| 32A | Classe 30 | Fusibile gG da 80A | Tipo 1 | 50 kA |
Informazione chiave: Le classi di intervento più lente (Classe 30) possono richiedere fusibili più grandi per ottenere il coordinamento, compromettendo potenzialmente le prestazioni di Tipo 2. I produttori forniscono tabelle di coordinamento che specificano le dimensioni massime dei fusibili per ciascuna classe di intervento.
Collegamenti interni e risorse correlate
Per una comprensione completa dei sistemi di protezione del motore e dei relativi componenti elettrici, esplora queste guide tecniche VIOX:
- Cosa sono i relè termici di sovraccarico: guida completa ai dispositivi di protezione del motore – Approfondimento sulla tecnologia dei relè di sovraccarico termico, sui tipi e sui criteri di selezione
- Guida al relè di sovraccarico NEMA Classe 20 vs. IEC Classe 10 – Confronto dettagliato degli standard di protezione del motore NEMA e IEC
- Contattore vs. Avviatore motore: comprendere le differenze chiave – Scopri come contattori e relè di sovraccarico lavorano insieme nel controllo del motore
- Come selezionare contattori e interruttori automatici in base alla potenza del motore – Guida pratica al dimensionamento per sistemi completi di protezione del motore
- Standard elettrici per contattori: comprensione delle categorie di utilizzo AC1, AC2, AC3, AC4 – Guida completa alle categorie di utilizzo IEC 60947-4-1
FAQ: Selezione e applicazione della classe di intervento
D1: Posso utilizzare un relè di sovraccarico di Classe 10 su un motore NEMA classificato per la Classe 20?
Un: Tecnicamente sì, ma non è raccomandato per la maggior parte delle applicazioni. Sebbene un relè di Classe 10 fornisca una protezione più rapida (potenzialmente vantaggiosa), può causare interventi intempestivi durante l'avviamento normale, specialmente per carichi ad alta inerzia o motori con tempi di accelerazione >8 secondi. Il motore NEMA è progettato per gestire in sicurezza lo stress termico associato alla protezione di Classe 20 (resistenza di 20 secondi a 600% FLA), quindi l'utilizzo della Classe 10 non fornisce un margine di sicurezza aggiuntivo, ma aumenta solo il rischio di interventi indesiderati. Eccezione: se il produttore del motore raccomanda specificamente la Classe 10 (ad esempio, per il funzionamento con VFD o cicli di lavoro speciali), seguire le sue indicazioni.
D2: Come determino la classe di intervento corretta se la targa del motore non la specifica?
Un: Segui questo albero decisionale:
- Controlla l'origine del motore: Motori NEMA (Nord America) → Classe 20; Motori IEC (Europei/Asiatici) → Classe 10
- Controllare il fattore di servizio: 1.15 SF → Classe 20; 1.0 SF → Classe 10
- Controllare il tipo di applicazione:
- Pompe sommergibili → Classe 10 o Classe 5
- Motori azionati da VFD → Classe 10
- Carichi ad alta inerzia (accelerazione >15s) → Classe 30
- Industriale generale → Classe 20
- Consultare il produttore: In caso di dubbi, contattare il produttore del motore con il numero di serie del motore: può fornire la classe di intervento consigliata in base alle specifiche di progettazione.
D3: Cosa succede se utilizzo la classe di intervento sbagliata?
Un: Due modalità di guasto:
- Sottoprotezione (Classe troppo lenta): Il motore subisce danni termici prima che il relè intervenga. Esempio: un relè di Classe 20 su un motore di Classe 10 consente 10-20 secondi di sovraccarico dannoso. Risultato: durata del motore ridotta, guasto dell'isolamento, guasto finale.
- Sovraprotezione (Classe troppo veloce): Il relè interviene durante il normale funzionamento, causando arresti indesiderati. Esempio: relè di Classe 10 su carico ad alta inerzia con accelerazione di 18 secondi. Risultato: il motore non raggiunge mai la piena velocità, tempi di fermo della produzione, operatori frustrati che possono bypassare la protezione (pericoloso).
D4: I relè di sovraccarico elettronici forniscono una protezione migliore rispetto ai relè termici?
Un: Non necessariamente “migliore”, ma più flessibile e precisa. I relè elettronici offrono:
- Classe di intervento regolabile (un dispositivo = applicazioni multiple)
- Maggiore precisione (±5% vs. ±15% per i termici)
- Diagnostica avanzata (squilibrio di corrente, guasto a terra, stato termico)
- Comunicazione (monitoraggio remoto, manutenzione predittiva)
Tuttavia, i relè termici presentano vantaggi:
- Nessuna alimentazione esterna richiesta (autoalimentato dalla corrente del motore)
- Immunità al rumore elettrico (importante in ambienti EMI difficili)
- Costo inferiore (per applicazioni semplici e fisse)
Raccomandazione: Utilizzare relè elettronici per applicazioni critiche, carichi variabili o dove sono necessari diagnostica/comunicazione. Utilizzare relè termici per applicazioni a costo contenuto, a servizio fisso, dove la semplicità è apprezzata.
D5: In che modo la temperatura ambiente influisce sulle prestazioni della classe di intervento?
Un: La temperatura ambiente influisce direttamente sul tempo di intervento perché sia il motore che il dispositivo di protezione sono interessati:
Lato motore:
- Temperatura ambiente più alta → Meno capacità termica disponibile → Aumento di temperatura più rapido
- Valore nominale standard: 40°C ambiente (IEC/NEMA)
- Declassamento richiesto sopra i 40°C (tipicamente 3% per °C sopra i 40°C)
Lato relè:
- Relè bimetallici: Compensano intrinsecamente (la striscia bimetallica risponde al riscaldamento ambiente + carico)
- Relè elettronici: Richiedono l'impostazione della compensazione ambiente (molti hanno sensori di temperatura integrati)
Esempio: Un motore in un ambiente a 50°C (10°C sopra lo standard) ha circa il 10% in meno di capacità termica. Il relè deve essere impostato del 10% inferiore (18A invece di 20A per un motore da 20A) OPPURE il motore deve essere declassato a 18A di funzionamento continuo. La classe di intervento rimane la stessa, ma la soglia di corrente cambia.
Conclusione
La classe di intervento è molto più di una semplice specifica di temporizzazione: rappresenta il collegamento critico tra le caratteristiche termiche del motore e la risposta del dispositivo di protezione. Comprendere le sfumature della protezione di Classe 5, 10, 10A, 20 e 30 consente agli ingegneri di progettare sistemi di controllo motore che prevengano sia guasti catastrofici che costosi interventi indesiderati.
Principi di progettazione chiave da ricordare:
- Abbinare la protezione al design del motore: I motori NEMA (Classe 20) e i motori IEC (Classe 10) hanno capacità termiche fondamentalmente diverse: una protezione non corrispondente compromette la sicurezza o l'affidabilità
- Considerare i cicli di lavoro reali: Le specifiche di avviamento a freddo non raccontano tutta la storia: le condizioni di riavvio a caldo (cicli frequenti) possono richiedere una protezione più rapida (Classe 10A)
- Verificare la compatibilità del tempo di accelerazione: Calcolare il tempo di accelerazione effettivo del motore e assicurarsi che sia inferiore all'80% del tempo della classe di intervento per evitare interventi indesiderati
- Sfruttare la tecnologia moderna: I relè di sovraccarico elettronici con classi di intervento regolabili offrono flessibilità, diagnostica e precisione che i relè termici fissi non possono eguagliare
- Coordinamento con la protezione a monte: La selezione della classe di intervento influisce sulla coordinazione di Tipo 1/Tipo 2 con fusibili e interruttori automatici: consultare le tabelle di coordinamento del produttore
Man mano che gli standard di efficienza dei motori si inaspriscono a livello globale (IEC IE4, IE5 all'orizzonte), i margini termici continuano a ridursi, rendendo la corretta selezione della classe di intervento più critica che mai. La tendenza verso i motori con classificazione di applicazione in stile IEC, anche nei mercati nordamericani, significa che gli ingegneri devono comprendere sia le filosofie di protezione NEMA che IEC per specificare sistemi che offrano affidabilità a lungo termine.
Informazioni su VIOX Electric: VIOX Electric è un produttore B2B leader di apparecchiature elettriche, specializzato in interruttori automatici per la protezione del motore (MPCB), relè di sovraccarico termici, contattori e soluzioni complete di controllo del motore per applicazioni industriali e commerciali. Il nostro team di ingegneri fornisce supporto tecnico per la progettazione di sistemi di protezione del motore, la selezione della classe di intervento e gli studi di coordinamento. Contattateci per una guida specifica per l'applicazione e assistenza nella selezione del prodotto.
