
เมื่อพลังงานต่ำพบกับพลังงานสูง: วิกฤตวงจรควบคุม
คุณใช้เวลาหลายสัปดาห์ในการออกแบบระบบอัตโนมัติที่สมบูรณ์แบบ อาจเป็นตัวควบคุมการชลประทานอัจฉริยะสำหรับเรือนกระจกของคุณ ระบบสายพานลำเลียงอุตสาหกรรม หรือฮับระบบอัตโนมัติในบ้าน โค้ด Arduino ของคุณสวยงาม ตรรกะของคุณไร้ที่ติ และคุณพร้อมที่จะเชื่อมต่อทุกสิ่ง.
จากนั้นความเป็นจริงก็มาถึง.
ไมโครคอนโทรลเลอร์ของคุณส่งออก 5V ที่ 40 มิลลิแอมป์ แต่ปั๊มน้ำ 220V ที่คุณต้องการควบคุมดึง 8 แอมป์ คุณลองเชื่อมต่อด้วยทรานซิสเตอร์—มันร้อนเกินไป คุณพยายามเชื่อมต่อโดยตรงผ่าน MOSFET—Arduino ของคุณปล่อยควันวิเศษออกมาและตายอย่างน่าอนาถ หรือแย่กว่านั้น: ไม่มีอะไรเกิดขึ้นเลย โหลดนั่งอยู่ที่นั่น เยาะเย้ยปริญญาวิศวกรรมของคุณ ปฏิเสธที่จะเปิด.
ดังนั้นคุณจะเชื่อมช่องว่างขนาดใหญ่นี้ระหว่างสัญญาณควบคุมพลังงานต่ำและโหลดอุตสาหกรรมพลังงานสูงได้อย่างไร โดยไม่ทำลายอุปกรณ์ราคาแพงหรือสร้างอันตรายด้านความปลอดภัย
คำตอบนั้นง่ายกว่าที่คุณคิด—แต่การเลือก ผิด โซลูชันอาจทำให้คุณเสียเวลา เงิน และอาจถึงชีวิตได้ คู่มือฉบับสมบูรณ์นี้จะเปลี่ยนคุณจากความสับสนไปสู่ความมั่นใจในการระบุ เลือก และใช้งานโมดูลรีเลย์สำหรับทุกแอปพลิเคชัน.
ทำไมไมโครคอนโทรลเลอร์ของคุณไม่สามารถควบคุมโหลดในโลกแห่งความเป็นจริงได้ (และทำไมมันถึงดีจริงๆ)
ก่อนที่เราจะเจาะลึกโมดูลรีเลย์ มาทำความเข้าใจกันก่อนว่า why ปัญหานี้มีอยู่ตั้งแต่แรก.
ไมโครคอนโทรลเลอร์ทั่วไปของคุณ—ไม่ว่าจะเป็น Arduino, Raspberry Pi, หรือ PLC อุตสาหกรรม—ได้รับการออกแบบมาเพื่อประมวลผลข้อมูล ไม่ใช่เครื่องจักรหนัก GPIO (General Purpose Input/Output) พินบนอุปกรณ์เหล่านี้โดยทั่วไปจะส่งออก:
- แรงดันไฟฟ้า: 3.3V ถึง 5V DC
- กระแสไฟฟ้า: สูงสุด 20-40 มิลลิแอมป์
- พลังงาน: ประมาณ 0.2 วัตต์
ในขณะเดียวกัน อุปกรณ์ในโลกแห่งความเป็นจริงต้องการมากกว่านั้นอย่างทวีคูณ:
- ปั๊มน้ำมาตรฐาน: 220V AC ที่ 5-10 แอมป์ (1,100-2,200 วัตต์)
- มอเตอร์อุตสาหกรรม: 480V AC ที่ 15 แอมป์ (7,200 วัตต์)
- แม้แต่ไฟบ้านธรรมดา: 120V AC ที่ 0.5 แอมป์ (60 วัตต์)
คณิตศาสตร์โหดร้าย: ไมโครคอนโทรลเลอร์ของคุณสามารถให้พลังงาน 0.2 วัตต์ แต่ต้องควบคุมอุปกรณ์ที่ใช้พลังงาน 60 ถึง 7,200 วัตต์ นั่นเหมือนกับการพยายามลากเรือบรรทุกสินค้าด้วยโซ่จักรยาน.
แต่นี่คือประเด็นที่ลึกซึ้งกว่า—มันไม่ใช่แค่เรื่องของพลังงาน. มันเกี่ยวกับฉนวนและความปลอดภัย. เมื่อคุณทำงานกับแรงดันไฟฟ้าสูง (อะไรก็ตามที่สูงกว่า 50V AC หรือ 120V DC) ข้อผิดพลาดในการเดินสายเพียงครั้งเดียวสามารถ:
- ส่ง 220V AC กลับเข้าไปในไมโครคอนโทรลเลอร์ของคุณ ทำให้มันระเหยกลายเป็นไอในทันที
- สร้างเส้นทางสำหรับแรงดันไฟฟ้าที่เป็นอันตรายให้เข้าถึงคุณผ่านตู้โลหะ
- ทำให้เกิดไฟไหม้จากไฟฟ้าลัดวงจรและความร้อนสูงเกินไป
- ละเมิดรหัสไฟฟ้าที่กำหนดให้มีฉนวนกัลวานิก
กุญแจ Takeaway: คุณต้องมี “ตัวแปลไฟฟ้า”—อุปกรณ์ที่รับสัญญาณควบคุมขนาดเล็ก แต่สามารถสลับโหลดพลังงานขนาดใหญ่ได้ ทั้งหมดนี้ในขณะที่ยังคงรักษาเกราะป้องกันความปลอดภัยทางกายภาพระหว่างสองวงจร นี่คือสิ่งที่โมดูลรีเลย์ได้รับการออกแบบมาเพื่อทำ.
โมดูลรีเลย์คืออะไร? สะพานไฟฟ้าของคุณระหว่างสองโลก


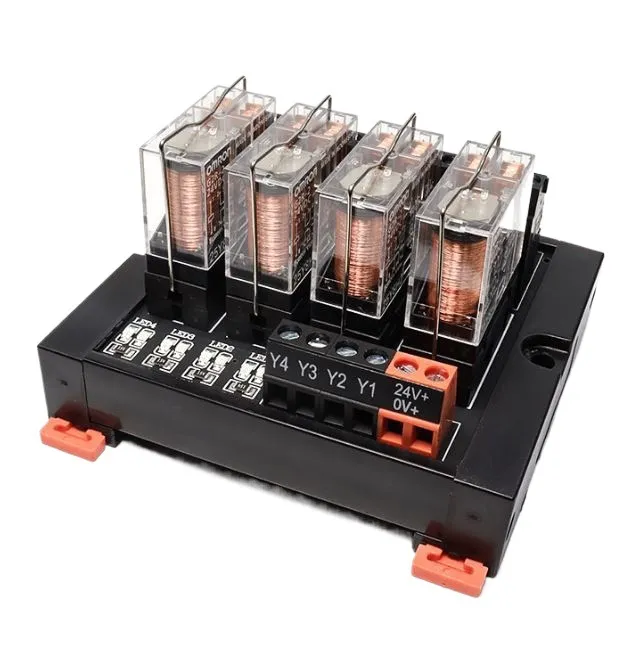
เป็ โมดูลรีเลย์ คือแผงวงจรที่มีสวิตช์แบบอิเล็กโทรแมคคานิกส์หรือโซลิดสเตตอย่างน้อยหนึ่งตัว พร้อมด้วยส่วนประกอบสนับสนุนที่ปกป้องทั้งวงจรควบคุมและตัวรีเลย์เอง คิดว่ามันเป็นสะพานไฟฟ้าที่ซับซ้อนพร้อมราวกันตกในตัว.
กายวิภาคของโมดูลรีเลย์
แตกต่างจากรีเลย์แบบสแตนด์อโลน (เฉพาะกลไกการสลับ) โมดูลรีเลย์เป็นระบบย่อยที่สมบูรณ์ซึ่งประกอบด้วย:
1. ตัวรีเลย์เอง
- ประเภทแม่เหล็กไฟฟ้า: ใช้คอยล์เพื่อสร้างสนามแม่เหล็กที่เคลื่อนย้ายหน้าสัมผัสทางกายภาพ (พบมากที่สุด)
- ประเภทโซลิดสเตต (SSR): ใช้เซมิคอนดักเตอร์ในการสลับโดยไม่มีชิ้นส่วนที่เคลื่อนไหว (เร็วกว่า อายุการใช้งานยาวนานกว่า แต่แพงกว่า)
2. วงจรควบคุมอินพุต
- พิน/ขั้วต่อเทอร์มินัล: ที่ซึ่งสัญญาณควบคุมแรงดันไฟฟ้าต่ำของคุณเชื่อมต่อ (โดยปกติคือ 3-4 พิน: VCC, GND, สัญญาณ, บางครั้งเปิดใช้งาน)
- บัฟเฟอร์อินพุต: ป้องกันไฟกระชากจากด้านควบคุม
3. หน้าสัมผัสไฟฟ้าเอาท์พุต
- ขั้วต่อสกรู (โดยทั่วไป 3): ทั่วไป (COM), เปิดตามปกติ (NO) และปิดตามปกติ (NC)
- สิ่งเหล่านี้จัดการการสลับแรงดันไฟฟ้าสูง กระแสสูง
4. ส่วนประกอบป้องกันที่สำคัญ
- ไดโอด Flyback: ป้องกันไฟกระชากเมื่อคอยล์รีเลย์หมดพลังงาน (สิ่งเหล่านี้ช่วยชีวิตไมโครคอนโทรลเลอร์ของคุณ)
- Optocouplers: สร้างฉนวนออปติคอลระหว่างด้านควบคุมและด้านพลังงาน (ในโมดูลที่แยกด้วยแสง)
- ตัวบ่งชี้ LED: การยืนยันด้วยภาพของสถานะรีเลย์
- ไดรเวอร์ทรานซิสเตอร์: ขยายสัญญาณควบคุมที่อ่อนแอให้มีกระแสเพียงพอสำหรับคอยล์รีเลย์
อะไรทำให้มันเป็น “โมดูลาร์”?
คำว่า “โมดูล” เป็นสิ่งสำคัญที่นี่ อุปกรณ์เหล่านี้มาในรูปแบบมาตรฐาน:
- ช่องทางเดียว: ควบคุมโหลดหนึ่งตัว (รีเลย์หนึ่งตัว)
- 2 ช่อง, 4 ช่อง, 8 ช่อง, 16 ช่อง: ควบคุมโหลดอิสระหลายตัว
- รูปแบบบอร์ด: ติดตั้งบน PCB, ติดตั้งบนราง DIN, ประเภทซ็อกเก็ตแบบเสียบได้
- พิกัดแรงดันไฟฟ้ามาตรฐาน: อินพุต 5V, 12V, 24V / เอาต์พุต 120V AC, 220V AC, 480V AC
มืออาชีพ-เคล็ดลับ: โมดูลรีเลย์ไม่ใช่แค่รีเลย์ที่บัดกรีบนบอร์ด ส่วนประกอบสนับสนุน โดยเฉพาะไดโอดฟลายแบ็คและออปโตคัปเปลอร์ คือสิ่งที่ป้องกันความล้มเหลวร้ายแรง การพยายามสร้าง “โมดูลรีเลย์” ของคุณเองด้วยรีเลย์เปล่าๆ ก็เหมือนกับการกระโดดร่มด้วยผ้าปูที่นอนแทนที่จะเป็นร่มชูชีพ มันอาจจะใช้ได้... ครั้งเดียว.
โมดูลรีเลย์ทำงานอย่างไร? ลำดับการสลับทีละขั้นตอน
การทำความเข้าใจกลไกภายในจะช่วยให้คุณแก้ไขปัญหาและเลือกโมดูลที่เหมาะสม นี่คือสิ่งที่เกิดขึ้นตั้งแต่คุณส่งสัญญาณควบคุม:
ขั้นตอนที่ 1: ใช้สัญญาณควบคุม (ตัวกระตุ้น)
ไมโครคอนโทรลเลอร์ของคุณส่งสัญญาณลอจิก HIGH (โดยทั่วไปคือ 3.3V หรือ 5V) ไปยังพินอินพุตของโมดูลรีเลย์ สัญญาณขนาดเล็กนี้เดินทางผ่าน:
- วงจรป้องกันอินพุต (ตัวต้านทานจำกัดกระแส)
- LED ออปโตคัปเปลอร์ (ถ้ามี) - แปลงสัญญาณไฟฟ้าเป็นแสง
- โฟโตทรานซิสเตอร์ (รับแสง สร้างสัญญาณไฟฟ้าที่ด้านแยก)
- ไดรเวอร์ทรานซิสเตอร์ (ขยายสัญญาณเป็น ~50-200mA ที่จำเป็นสำหรับขดลวดรีเลย์)
ขั้นตอนที่ 2: การเปิดใช้งานแม่เหล็กไฟฟ้า (กล้ามเนื้อ)
กระแสที่ขยายแล้วไหลผ่านขดลวดแม่เหล็กไฟฟ้าของรีเลย์ (โดยทั่วไปคือความต้านทาน 70-400 โอห์ม) สิ่งนี้สร้างสนามแม่เหล็กที่แรงพอที่จะ:
- ดึงโลหะ อาร์มาเจอร์ (แขนเคลื่อนที่) เข้าหาขดลวด
- เอาชนะแรงตึงของสปริงที่ยึดหน้าสัมผัสออกจากกัน
- การเคลื่อนที่ทางกลนี้ใช้เวลา 5-15 มิลลิวินาที
ขั้นตอนที่ 3: การปิดหน้าสัมผัส (สวิตช์)
การเคลื่อนที่ของอาร์มาเจอร์ทำให้เกิดการกระทำอย่างใดอย่างหนึ่งจากสองอย่าง:
สำหรับการกำหนดค่า Normally Open (NO):
- หน้าสัมผัสจะถูกแยกออกจากกันโดยค่าเริ่มต้น (วงจรเปิด)
- อาร์มาเจอร์ดึงหน้าสัมผัสเข้าด้วยกัน → วงจรปิด → พลังงานไหลไปยังโหลด
สำหรับการกำหนดค่า Normally Closed (NC):
- หน้าสัมผัสแตะกันโดยค่าเริ่มต้น (วงจรปิด)
- อาร์มาเจอร์ดึงหน้าสัมผัสออกจากกัน → วงจรเปิด → พลังงานหยุดไหล
ทางกายภาพ ช่องว่างอากาศ ระหว่างหน้าสัมผัส (โดยทั่วไปคือ 1-2 มม.) ให้การแยกแกลแวนิกที่แท้จริง ซึ่งเป็นการแยกทางกายภาพที่สมบูรณ์ระหว่างวงจรควบคุม 5V ของคุณและวงจรไฟฟ้า 220V ของคุณ.
ขั้นตอนที่ 4: การจ่ายพลังงานให้โหลด (ผลลัพธ์)
เมื่อหน้าสัมผัสปิด กระแส AC หรือ DC แรงดันสูงจะไหลผ่าน:
- ขั้ว COM (Common) → รับพลังงานจากแหล่งจ่าย
- ขั้ว NO (Normally Open) → เชื่อมต่อกับโหลดของคุณ
- โหลดทำงาน (มอเตอร์หมุน ไฟสว่าง โซลินอยด์ทำงาน ฯลฯ)
ขั้นตอนที่ 5: การลดพลังงาน (การปิดระบบ)
เมื่อคุณลบสัญญาณควบคุม (ลอจิก LOW) กระบวนการจะกลับกัน:
- กระแสหยุดไหลผ่านขดลวดรีเลย์
- สนามแม่เหล็กลดลง
- ช่วงเวลาสำคัญ: สนามแม่เหล็กที่ลดลงจะสร้างแรงดันไฟฟ้าย้อนกลับ (แรงดันไฟฟลายแบ็ค) ที่สามารถสูงถึง 100V+
- ไดโอดฟลายแบ็ค นำกระแสทันที โดยปัดแรงดันไฟนี้ลงกราวด์อย่างปลอดภัย
- แรงตึงของสปริงดึงอาร์มาเจอร์กลับสู่ตำแหน่งเริ่มต้น
- หน้าสัมผัสแยกจากกัน → วงจรไฟฟ้าเปิด → โหลดลดพลังงาน
มืออาชีพ-เคล็ดลับ: ไดโอดฟลายแบ็คไม่ใช่ส่วนประกอบทางการตลาดที่ไม่จำเป็น แต่เป็นส่วนประกอบที่ป้องกันไม่ให้ Arduino ของคุณกลายเป็นที่ทับกระดาษราคาแพง หากไม่มีไดโอดนี้ แรงดันไฟฟ้าที่เกิดจากการยุบตัวของขดลวดสามารถทะลุผ่านพินเอาต์พุตของไมโครคอนโทรลเลอร์ของคุณ ทำลาย IC ทั้งหมด ตรวจสอบเสมอว่าโมดูลรีเลย์ของคุณมีการป้องกันนี้.
ประเภทของโมดูลรีเลย์: การเลือกอาวุธไฟฟ้าของคุณ
ไม่ใช่ว่าโมดูลรีเลย์ทั้งหมดจะถูกสร้างขึ้นมาเท่ากัน ประเภทที่คุณเลือกขึ้นอยู่กับความต้องการของแอปพลิเคชันของคุณในด้านความเร็ว ความแม่นยำ ความสามารถในการรับกระแส และสภาพแวดล้อม.
1. โมดูลรีเลย์แม่เหล็กไฟฟ้า (EMR) — ม้างาน
วิธีการทำงาน: หน้าสัมผัสทางกายภาพเคลื่อนที่โดยขดลวดแม่เหล็กไฟฟ้า
ข้อดี:
- ความสามารถในการรับกระแสสูง: สามารถรองรับ 5A ถึง 30A ต่อหน้าสัมผัส
- การแยกส่วนทางไฟฟ้าอย่างแท้จริง: ช่องว่างอากาศทางกายภาพให้การแยกทางไฟฟ้าอย่างสมบูรณ์
- ต้นทุนต่ำ: $2-$10 ต่อช่องสัญญาณรีเลย์
- ความเข้ากันได้สากล: ทำงานได้ดีกับโหลด AC หรือ DC อย่างเท่าเทียมกัน
- ไม่มีปัญหาการระบายความร้อน: แตกต่างจากเซมิคอนดักเตอร์ หน้าสัมผัสไม่สร้างความร้อนระหว่างการนำไฟฟ้า
ข้อเสีย :
- การสึกหรอทางกล: หน้าสัมผัสเสื่อมสภาพหลังจาก 100,000 ถึง 1,000,000 รอบ
- การสลับช้า: เวลาตอบสนอง 5-15ms
- เสียงคลิกที่ได้ยิน: สวิตช์แต่ละตัวมีเสียง
- การกระดอนของหน้าสัมผัส: หน้าสัมผัสสามารถกระดอนเปิด/ปิดได้ 1-2ms ระหว่างการเปลี่ยนสถานะ
- ขนาด: ขนาดใหญ่กว่าทางเลือกแบบโซลิดสเตต
ดีที่สุดสำหรับ: อุปกรณ์อุตสาหกรรม, การควบคุม HVAC, สตาร์ทเตอร์มอเตอร์, การใช้งานใดๆ ที่ความสามารถในการรับกระแสไฟฟ้าและการแยกส่วนมีความสำคัญเหนือกว่าความเร็ว
2. มอดูล Solid-State Relay (SSR) — ราชาแห่งความเร็ว
วิธีการทำงาน: เซมิคอนดักเตอร์ (TRIACs, ไทริสเตอร์, MOSFETs) สลับโดยไม่มีชิ้นส่วนที่เคลื่อนไหว
ข้อดี:
- การสลับที่รวดเร็วเป็นพิเศษ: เวลาตอบสนองต่ำกว่ามิลลิวินาที
- การทำงานแบบเงียบ: ไม่มีเสียงรบกวนทางกล
- อายุการใช้งานยาวนาน: ไม่มีการสึกหรอของหน้าสัมผัส = ล้านถึงพันล้านรอบ
- ไม่มีการกระดอนของหน้าสัมผัส: การสลับที่สะอาดสำหรับอุปกรณ์อิเล็กทรอนิกส์ที่ละเอียดอ่อน
- ขนาดกะทัดรัด: ขนาดเล็กกว่าเมื่อเทียบเท่ากับ EMR
ข้อเสีย :
- การสร้างความร้อน: เซมิคอนดักเตอร์ระบายความร้อน 1-2 วัตต์ แม้ในขณะที่ “เปิด” ซึ่งต้องใช้ฮีทซิงค์
- แรงดันตก: โดยทั่วไปแรงดันไฟฟ้าลดลง 1-2V ทั่ว SSR เมื่อนำไฟฟ้า (พลังงานสูญเสีย)
- ราคาสูงกว่า: $10-$50+ ต่อรีเลย์
- อ่อนไหวต่อประเภทโหลด: SSR บางตัวทำงานกับ AC เท่านั้น บางตัวทำงานกับ DC เท่านั้น
- ความทนทานต่อไฟกระชากต่ำกว่า: เสี่ยงต่อแรงดันไฟฟ้าเกินมากกว่าหน้าสัมผัสทางกล
ดีที่สุดสำหรับ: การสลับความถี่สูง (การควบคุม PID, การใช้งาน PWM), สภาพแวดล้อมที่ไวต่ออุณหภูมิซึ่งไม่สามารถยอมรับเสียงคลิกได้, การใช้งานที่มีอายุการใช้งานยาวนาน (> 1 ล้านรอบ)
3. มอดูล Hybrid Relay — สิ่งที่ดีที่สุดของทั้งสองโลก
รวมรีเลย์แม่เหล็กไฟฟ้าสำหรับการสลับกำลังไฟฟ้าเข้ากับ SSR สำหรับการใช้งานนำร่องหรือการระงับส่วนโค้งไฟฟ้า.
ดีที่สุดสำหรับ: การใช้งานที่ต้องการทั้งความสามารถในการรับกระแสไฟฟ้าสูงและอายุการใช้งานหน้าสัมผัสที่ยาวนาน (เช่น วงจรสตาร์ทแบบนุ่มนวลของมอเตอร์)
4. การกำหนดค่าพิเศษ
- รีเลย์ Latching: คงอยู่ในตำแหน่งสุดท้ายโดยไม่ต้องใช้พลังงานคอยล์อย่างต่อเนื่อง (ประหยัดพลังงานสำหรับการใช้งานแบตเตอรี่)
- รีเลย์หน่วงเวลา: วงจรจับเวลาในตัวสำหรับการสลับที่ล่าช้า
- รีเลย์ความปลอดภัย: หน้าสัมผัสสำรองพร้อมกลไกบังคับนำ (สำคัญสำหรับความปลอดภัยของเครื่องจักร)
- รีเลย์ความถี่สูง/RF: ออกแบบมาเป็นพิเศษสำหรับวิทยุและโทรคมนาคม (การจับคู่อิมพีแดนซ์ 50Ω, การสูญเสียการแทรกน้อยที่สุด)
เคล็ดลับมือโปร: SSR ดูเหมือนจะเหนือกว่าบนกระดาษ—เร็วกว่า, อายุการใช้งานยาวนานกว่า, เงียบ แต่เป็นตัวเลือกที่ไม่ถูกต้องสำหรับการควบคุมมอเตอร์อุตสาหกรรมส่วนใหญ่ ทำไม? แรงดันไฟฟ้าที่ลดลงสร้างความร้อน และความร้อนคือศัตรูในตู้ควบคุมที่ร้อนอยู่แล้ว นอกจากนี้ EMR ยังจัดการกับกระแสไฟกระชาก (6-8 เท่าของกระแสปกติเมื่อมอเตอร์สตาร์ท) ได้ดีกว่าเซมิคอนดักเตอร์ จับคู่ประเภทรีเลย์กับการใช้งาน ไม่ใช่โฆษณาเกินจริงในเอกสารข้อมูลจำเพาะ.
คู่มือการเลือกรีเลย์โมดูลฉบับสมบูรณ์: ข้อกำหนดที่สำคัญหกประการ
การเลือกรีเลย์โมดูลที่ไม่ถูกต้องมีราคาแพง—หน้าสัมผัสไหม้, โหลดล้มเหลว หรือวงจรควบคุมถูกทำลาย ทำตามแนวทางที่เป็นระบบนี้เพื่อระบุอย่างถูกต้องทุกครั้ง.
ขั้นตอนที่ 1: กำหนดข้อกำหนดโหลดของคุณ
ก่อนที่คุณจะดูข้อกำหนดของรีเลย์ ให้ระบุลักษณะโหลดของคุณอย่างละเอียด:
แรงดันไฟฟ้า:
- แรงดันไฟฟ้าของแหล่งจ่ายคืออะไร? (120V AC, 220V AC, 24V DC, ฯลฯ)
- สิ่งนี้จะเปลี่ยนแปลงหรือไม่? (อุปกรณ์บางอย่างมีความสามารถในการใช้แรงดันไฟฟ้าคู่)
กระแสไฟฟ้า:
- อะไรคือ กระแสไฟฟ้าขณะทำงาน (สถานะคงที่)?
- อะไรคือ กระแสไหลเข้า (ไฟกระชากเริ่มต้น)? สำหรับมอเตอร์ โดยทั่วไปคือ 6-10 เท่าของกระแสไฟฟ้าขณะทำงานเป็นเวลา 100-500ms
- อะไรคือ กระแสไฟฟ้าขณะโรเตอร์ล็อค (สถานการณ์ที่เลวร้ายที่สุดหากมอเตอร์หยุดทำงาน)?
ประเภทโหลด:
- ตัวต้านทาน: เครื่องทำความร้อน, หลอดไส้ (ง่ายที่สุดสำหรับหน้าสัมผัส)
- ตัวเหนี่ยวนำ: มอเตอร์, โซลินอยด์, หม้อแปลง (สร้าง Back-EMF, มีผลต่อหน้าสัมผัสมากที่สุด)
- แบบ Capacitive: แหล่งจ่ายไฟ, ไดรเวอร์ LED (กระแสไหลเข้าสูง, แรงดันปานกลาง)
- โหลดหลอดไฟ: ไส้หลอดทังสเตนมีกระแสไหลเข้า 10-15 เท่าเนื่องจากความต้านทานขณะเย็น
ตัวอย่าง: มอเตอร์เฟสเดียว 1HP, 220V:
- กระแสขณะทำงาน: ~6.8A (จากป้ายชื่อ)
- กระแสไหลเข้า: 6.8A × 6 = ~40A เป็นเวลา 100ms
- ดังนั้น คุณต้องใช้รีเลย์ที่มีพิกัด ≥10A อย่างต่อเนื่อง และสามารถรองรับกระแสไหลเข้า 40A ได้
ขั้นตอนที่ 2: เลือกพิกัดกระแสไฟฟ้าของหน้าสัมผัส (โดยมี Safety Margin)
กฎทอง: ลดพิกัดลงอย่างน้อย 50% เพื่ออายุการใช้งานที่ยาวนาน
หากโหลดของคุณดึงกระแส 10A อย่างต่อเนื่อง:
- ผิด: เลือกรีเลย์ 10A (จะเสียก่อนเวลาอันควร)
- ถูก: เลือกรีเลย์ 20A (หน้าสัมผัสจะมีอายุการใช้งานตามที่กำหนด)
ทำไมต้องลดพิกัด?
- พิกัดหน้าสัมผัสถือว่าอยู่ในสภาวะที่เหมาะสม (อุณหภูมิ, ระดับความสูง, ความถี่ในการสับเปลี่ยนที่เฉพาะเจาะจง)
- สภาพแวดล้อมจริงทำให้ประสิทธิภาพลดลง
- การลดพิกัดจะช่วยยืดอายุการใช้งานของหน้าสัมผัสจาก 100,000 รอบเป็น 500,000+ รอบ
เคล็ดลับมือโปร: ให้ความสนใจกับ พิกัด AC เทียบกับ DC—แตกต่างกันอย่างมาก! รีเลย์ที่มีพิกัด “10A ที่ 250V AC” อาจรองรับได้เพียง “5A ที่ 30V DC” เท่านั้น ทำไม? กระแส AC จะตัดผ่านศูนย์โดยธรรมชาติ 100-120 ครั้งต่อวินาที ดับอาร์คใดๆ กระแส DC รักษาอาร์คอย่างต่อเนื่อง ทำให้เกิดการกัดกร่อนของหน้าสัมผัสอย่างรุนแรง ตรวจสอบพิกัดทั้งสองเสมอ.
ขั้นตอนที่ 3: ตรวจสอบพิกัดแรงดันไฟฟ้าในการสับเปลี่ยน
规则: เลือกรีเลย์ที่มีพิกัด ≥150% ของแรงดันไฟฟ้าของแหล่งจ่ายไฟของคุณ
- สำหรับโหลด 120V AC → รีเลย์ขั้นต่ำ 180V (ใช้พิกัด 250V)
- สำหรับโหลด 220V AC → รีเลย์ขั้นต่ำ 330V (ใช้พิกัด 400V)
- สำหรับโหลด 24V DC → รีเลย์ขั้นต่ำ 36V (ใช้พิกัด 50V)
ทำไมต้องมี Safety Margin มากขนาดนี้? แรงดันไฟฟ้าเกินชั่วขณะจาก:
- ฟ้าผ่าบนสายไฟใกล้เคียง
- การสตาร์ทมอเตอร์ขนาดใหญ่ที่อื่นในโรงงาน
- อุปกรณ์เชื่อมหรือการทำงานที่ใช้กระแสสูงอื่นๆ
- สามารถสร้างเหตุการณ์แรงดันไฟฟ้าเกินชั่วครู่ 50-100% เหนือค่าปกติ
ขั้นตอนที่ 4: เลือกแรงดันไฟฟ้าควบคุม (ให้ตรงกับคอนโทรลเลอร์ของคุณ)
แรงดันไฟฟ้าควบคุมทั่วไป:
- 5V: Arduino, Raspberry Pi, ไมโครคอนโทรลเลอร์สำหรับงานอดิเรกส่วนใหญ่
- 3.3V: ไมโครคอนโทรลเลอร์รุ่นใหม่บางรุ่น, อุปกรณ์ IoT (ตรวจสอบความเข้ากันได้!)
- 12V: ยานยนต์, PLC อุตสาหกรรม, ระบบที่ใช้พลังงานจากแบตเตอรี่
- 24V: มาตรฐานอุตสาหกรรม (PLC, อุปกรณ์อัตโนมัติ)
การตรวจสอบที่สำคัญ: ไมโครคอนโทรลเลอร์ของคุณสามารถ แหล่งจ่ายไฟ จ่ายกระแสไฟฟ้าได้เพียงพอหรือไม่?
ขดลวดรีเลย์ทั่วไปดึงกระแส 50-200mA
พิน Arduino: สูงสุด 40mA (ไม่เพียงพอสำหรับการขับโดยตรง!)
สารละลาย: ใช้โมดูลรีเลย์ที่มีวงจรขับทรานซิสเตอร์ (โมดูลเชิงพาณิชย์ส่วนใหญ่มีสิ่งนี้)
ขั้นตอนที่ 5: กำหนดจำนวนช่องสัญญาณ
คุณต้องการควบคุมโหลดอิสระกี่โหลด?
- ช่องทางเดียว: หนึ่งโหลด (ง่ายที่สุด, ต้นทุนต่ำสุด)
- 2/4 ช่องสัญญาณ: หลายโหลด, ประหยัดพื้นที่
- 8/16 ช่องสัญญาณ: ระบบอัตโนมัติ, แผงควบคุม
ข้อควรพิจารณา: แม้ว่าคุณจะต้องการเพียง 3 รีเลย์ในตอนนี้ การซื้อโมดูล 4 ช่องสัญญาณอาจคุ้มค่ากว่ารีเลย์เดี่ยวสามตัว และให้ความสามารถในการขยายเพิ่มเติม.
ขั้นตอนที่ 6: เลือกคุณสมบัติพิเศษ (ถ้าจำเป็น)
- Opto-isolation: สร้างฉนวนกั้นแสงระหว่างด้านควบคุมและด้านกำลัง
- จำเป็นสำหรับ: สภาพแวดล้อมทางอุตสาหกรรมที่มีสัญญาณรบกวน, ระบบที่สำคัญต่อความปลอดภัย, การเดินสายเคเบิลระยะไกล
- เพิ่มต้นทุน 1-5% ต่อช่องสัญญาณ แต่ให้ความต้านทานต่อสัญญาณรบกวนที่เหนือกว่า
- ไฟ LED แสดงสถานะ: การยืนยันด้วยภาพของสถานะรีเลย์
- มีค่าอย่างยิ่งสำหรับการแก้ไขปัญหา
- เป็นมาตรฐานในโมดูลคุณภาพส่วนใหญ่
- รูปแบบการติดตั้ง:
- ติดตั้งบน PCB: การติดตั้งถาวร, การพัฒนาผลิตภัณฑ์
- ติดตั้งบนราง DIN: ตู้ควบคุมอุตสาหกรรม, เข้าถึงการบำรุงรักษาง่าย
- ติดตั้งแบบซ็อกเก็ต: รีเลย์แบบเสียบปลั๊ก, ความสามารถในการเปลี่ยนอย่างรวดเร็ว
ข้อผิดพลาดทั่วไปของโมดูลรีเลย์ที่จะทำให้คุณเสียค่าใช้จ่าย (และวิธีหลีกเลี่ยง)
ข้อผิดพลาดที่ 1: การละเลยกระแสไหลเข้า
สถานการณ์: คุณกำหนดรีเลย์สำหรับมอเตอร์ 5A โดยอิงตามกระแสขณะทำงานบนป้ายชื่อ หน้าสัมผัสรีเลย์เชื่อมติดกันหลังจาก 2 สัปดาห์.
ความเป็นจริง: กระแสไหลเข้าของมอเตอร์คือ 30A เป็นเวลา 100ms เมื่อเริ่มต้น หน้าสัมผัสไม่ได้ถูกจัดอันดับสำหรับกระแสไฟกระชากนี้.
การแก้ไข: คูณ FLA (กระแสเต็มพิกัด) ของมอเตอร์ด้วย 6-8 เสมอสำหรับกระแสไหลเข้า และเลือกรีเลย์ที่ได้รับการจัดอันดับสำหรับค่าสูงสุดนี้ หรือใช้ วงจรสตาร์ทแบบนุ่มนวล เพื่อจำกัดกระแสไหลเข้า.
ข้อผิดพลาดที่ 2: การใช้พิกัด DC สำหรับโหลด AC (หรือในทางกลับกัน)
สถานการณ์: รีเลย์ “10A” ของคุณล้มเหลวในการควบคุมโซลินอยด์ DC 5A.
ความเป็นจริง: พิกัด 10A ใช้สำหรับ AC เท่านั้น พิกัด DC คือ 3A.
การแก้ไข: ตรวจสอบเอกสารข้อมูลสำหรับพิกัด AC และ DC ทั้งคู่ อาจแตกต่างกัน 50-200%.
ข้อผิดพลาดที่ 3: ไม่มีการป้องกันไดโอด Flyback
สถานการณ์: Arduino ของคุณรีเซ็ตแบบสุ่มหรือหยุดตอบสนองหลังจากเปิดใช้งานรีเลย์.
ความเป็นจริง: แรงดันไฟกระชาก Flyback จากการตัดไฟคอยล์รีเลย์กำลังทำให้ไมโครคอนโทรลเลอร์เสียหายหรือทำลายพินเอาต์พุต.
การแก้ไข: ใช้โมดูลรีเลย์ที่มีไดโอด Flyback ในตัวเสมอ หากคุณต้องใช้รีเลย์เปลือย ให้เพิ่มไดโอด 1N4007 ข้ามคอยล์ (แคโทดเป็นบวก).
ข้อผิดพลาดที่ 4: การลดขนาดเกจสายไฟ
สถานการณ์: รีเลย์ที่ได้รับการจัดอันดับอย่างถูกต้องของคุณยังคงล้มเหลวหรือทำให้เกิดปัญหาแรงดันไฟฟ้าตก.
ความเป็นจริง: คุณใช้สายไฟ 22 AWG สำหรับโหลด 15A สายไฟเป็นคอขวด.
การแก้ไข: ทำตามตารางแอมแปร์ของสายไฟ:
- โหลด 10A → ขั้นต่ำ 18 AWG
- โหลด 15A → ขั้นต่ำ 14 AWG
- โหลด 20A → ขั้นต่ำ 12 AWG
ข้อผิดพลาดที่ 5: การละเลยวัสดุหน้าสัมผัสสำหรับแอปพลิเคชันของคุณ
ความเป็นจริง: หน้าสัมผัสรีเลย์ไม่ได้เหมือนกันทั้งหมด:
- ซิลเวอร์-แคดเมียมออกไซด์: อเนกประสงค์, เหมาะสำหรับโหลดส่วนใหญ่
- ซิลเวอร์-ทินออกไซด์: โหลดมอเตอร์, ทนทานต่อกระแสไหลเข้าสูง
- ทอง: การสลับสัญญาณกำลังต่ำ (มิลลิแอมป์), ไม่ใช่สำหรับโหลดกำลัง
การแก้ไข: จับคู่วัสดุหน้าสัมผัสกับประเภทโหลด—ตรวจสอบข้อกำหนดในเอกสารข้อมูล.
ตัวอย่างการใช้งานจริง
ตัวอย่างที่ 1: การควบคุมแสงสว่างในบ้านอัจฉริยะ
ความท้าทาย: ควบคุมไฟบ้าน 8 ดวง (120V AC, 60W แต่ละดวง) ด้วย Raspberry Pi (3.3V GPIO).
สารละลาย:
- โมดูลรีเลย์ 5V 8 ช่องสัญญาณพร้อม Opto-isolation
- แต่ละช่องสัญญาณได้รับการจัดอันดับสำหรับ 10A ที่ 250V AC (60W ÷ 120V = 0.5A, ส่วนต่างความปลอดภัยขนาดใหญ่)
- โหลดตัวต้านทาน (หลอดไส้) = ง่ายต่อหน้าสัมผัส
- ราคารวม: ~20 บาทสำหรับโมดูล
ตัวอย่างที่ 2: การควบคุมมอเตอร์สายพานลำเลียงอุตสาหกรรม
ความท้าทาย: เริ่ม/หยุดมอเตอร์สามเฟส 2HP, 220V ด้วย PLC (เอาต์พุต 24V DC).
สารละลาย:
- โมดูลรีเลย์อุตสาหกรรม 24V ช่องสัญญาณเดียว, ติดตั้งบนราง DIN
- พิกัดหน้าสัมผัส: 25A ที่ 480V AC (มอเตอร์ดึง 8A ขณะทำงาน, 48A กระแสไหลเข้า)
- หน้าสัมผัสซิลเวอร์-ทินออกไซด์สำหรับงานมอเตอร์
- ไฟ LED แสดงสถานะในตัวเพื่อการมองเห็นในการบำรุงรักษา
- ราคา: ~45 บาท, แต่ป้องกันเหตุการณ์หยุดทำงาน 5,000+ บาท
ตัวอย่างที่ 3: ระบบชลประทาน Arduino
ความท้าทาย: ควบคุมโซลินอยด์วาล์ว 4 ตัว (24V AC, 0.5A แต่ละตัว) ด้วย Arduino (5V).
สารละลาย:
- โมดูลรีเลย์ 5V 4 ช่องสัญญาณ
- พิกัด 10A ต่อช่องสัญญาณ (ส่วนต่างความปลอดภัยขนาดใหญ่สำหรับวาล์ว 0.5A)
- ราคา: ~8 บาท
- สำคัญ: โซลินอยด์แต่ละตัวเป็นโหลดเหนี่ยวนำ ดังนั้นไดโอด Flyback ในโมดูลจึงมีความสำคัญ
สรุป: รายการตรวจสอบข้อกำหนดโมดูลรีเลย์ของคุณ
โมดูลรีเลย์คือสะพานเชื่อมที่จำเป็นระหว่างระบบควบคุมกำลังต่ำและแอ็คชั่นในโลกแห่งความเป็นจริงกำลังสูง เมื่อทำตามแนวทางที่เป็นระบบนี้ คุณจะระบุโมดูลที่เหมาะสมได้ทุกครั้ง:
ก่อนที่คุณจะซื้อ:
- คำนวณกระแสขณะทำงานและกระแสไหลเข้าสำหรับโหลดของคุณ
- ตรวจสอบว่าพิกัด AC และ DC ตรงกับแอปพลิเคชันของคุณ
- ลดพิกัดหน้าสัมผัสลง 50% เพื่ออายุการใช้งานที่ยาวนาน
- ยืนยันว่าแรงดันไฟฟ้าควบคุมตรงกับไมโครคอนโทรลเลอร์ของคุณ
- ตรวจสอบไดโอดฟลายแบ็คและการป้องกันออปโตคัปเปลอร์
- เลือกรูปแบบการติดตั้งที่เหมาะสมสำหรับการติดตั้งของคุณ
- พิจารณาความต้องการในการขยายในอนาคต (ช่องสัญญาณเพิ่มเติม)
สรุปประเด็นสำคัญ:
- การแยกส่วนคือทุกสิ่ง: อย่าประนีประนอมกับการแยกทางกายภาพ/แสงระหว่างการควบคุมและกำลังไฟฟ้า
- กระแสไฟฟ้าทำลายหน้าสัมผัส: การประเมินความสามารถในการรับกระแสไฟฟ้าต่ำกว่าความเป็นจริงเป็นสาเหตุหลักของการที่รีเลย์ล้มเหลวก่อนเวลาอันควร
- การป้องกันไม่ใช่ทางเลือก: ไดโอดฟลายแบ็คช่วยประหยัดไมโครคอนโทรลเลอร์ของคุณ การใส่ฟิวส์ที่เหมาะสมช่วยประหยัดโรงงานของคุณ
- เลือกเครื่องมือให้เหมาะสมกับงาน: EMR สำหรับกำลังไฟฟ้า, SSR สำหรับความเร็ว, ออปโต-ไอโซเลชันสำหรับภูมิคุ้มกันต่อสัญญาณรบกวน
ขั้นตอนต่อไปของคุณ: ก่อนที่คุณจะคลิก “เพิ่มลงในรถเข็น” ให้นำเอกสารข้อมูลออกมาและตรวจสอบทุกข้อกำหนดเทียบกับข้อกำหนดของโหลดจริงของคุณ 10 นาทีที่คุณใช้ในตอนนี้จะช่วยประหยัดเวลาในการแก้ไขปัญหาและอุปกรณ์ที่ถูกเผาไหม้เป็นเงินหลายร้อยดอลลาร์.
มีคำถามเกี่ยวกับแอปพลิเคชันโมดูลรีเลย์เฉพาะหรือไม่? โหมดความล้มเหลวที่พบบ่อยที่สุดคือการเลือกโดยพิจารณาจากแรงดันไฟฟ้าเพียงอย่างเดียวในขณะที่ละเลยความสามารถในการรับกระแสไฟฟ้าและประเภทโหลด อย่าปล่อยให้สิ่งนี้เป็นบทเรียนราคาแพงที่คุณได้รับ.
